
不同航线规划的无人机影像三维建模质量分析
2020-06-04 00:09王云川段平李佳姚永祥成李博
遥感信息 2020年2期
王云川,段平,李佳,姚永祥,成李博
(1.云南师范大学 旅游与地理科学学院,昆明 650500;2.云南省高校资源与环境遥感重点实验室,昆明 650500;3.云南省地理空间信息工程技术研究中心,昆明 650500)
0 引言
利用无人机进行倾斜摄影测量是近年来测绘领域发展起来的一项高新技术[1-5]。倾斜摄影测量不同于传统摄影测量只从一个垂直镜头获取影像,而是从垂直、前、后、左、右5个不同的角度同时获取目标的影像。
目前,利用无人机倾斜摄影测量技术进行三维模型重建已在多个领域广泛应用[6-8]。胡应龙等[9]利用多旋翼无人机和三轴云台相机采集多视角影像,并重建古村落三维实景。孙保燕等[10]将航摄影像建模技术与地面激光扫面技术相结合,构建古建筑物的三维模型。方留杨等[11-12]则将无人机倾斜摄影技术用于地质灾害的研究与检测。Li等[13]采用一种环拍辅助技术优化三维模型,解决三维模型细节丢失问题。此外,于丙辰等[14]还将无人机遥感应用于大型文物保护方面的数字化研究。然而,针对航线规划对其三维模型精度的研究却较少。另一方面,随着城市建设的火热进行,圆形建筑物、塔式建筑物以及长条状建筑物等多种不规则建筑物开始进入我们的生活,不规则的形状也给智慧城市三维建模的建立带来了困难。长条状建筑物因分布区域较长、遮挡较多和相互平行的特点,导致三维建模仍存在一些困难:①采集的影像数据量大,存在较大数据冗余;②建模效率低,模型存在空洞及变形;③纹理信息缺失。无人机的航线规划是无人机智能化获取影像过程中的关键一步,航线规划的好坏会直接导致三维建模的成功率,因此研究不同航线规划对三维建模的精度影响,对无人机三维建模的应用有积极的作用。
本文以云南师范大学一长条状建筑物为研究区域,规划设计了“垂直航线”“平行航线”的无人机数据采集航线方案,在此基础上构建其三维模型并对其进行评估,最后综合评价2种不同航线的优缺点。
1 研究区及数据
1.1 研究区选取
研究区域选择云南师范大学呈贡校区武之楼,总面积大约为0.02 km2。该区域地势平坦,建筑四周植被茂盛,目标建筑物结构规整,侧面呈矩形状,从顶面看呈长条状且相互平行,与字母E略像,为典型的长条状建筑物。拍摄当日风速相对平稳,光照条件适宜,有利于无人机影像数据的采集,研究区如图1所示。

图1 研究区域图
1.2 设备介绍
采用哈瓦MEGA V8 II四轴八旋翼无人机作为飞行平台,无人机设备及相机镜头如图2所示,主要由飞行平台、应用模块和控制系统等构成,搭载哈瓦无人机5镜头倾斜摄影模块,相机具体参数如表1所示。

图2 哈瓦无人机及镜头
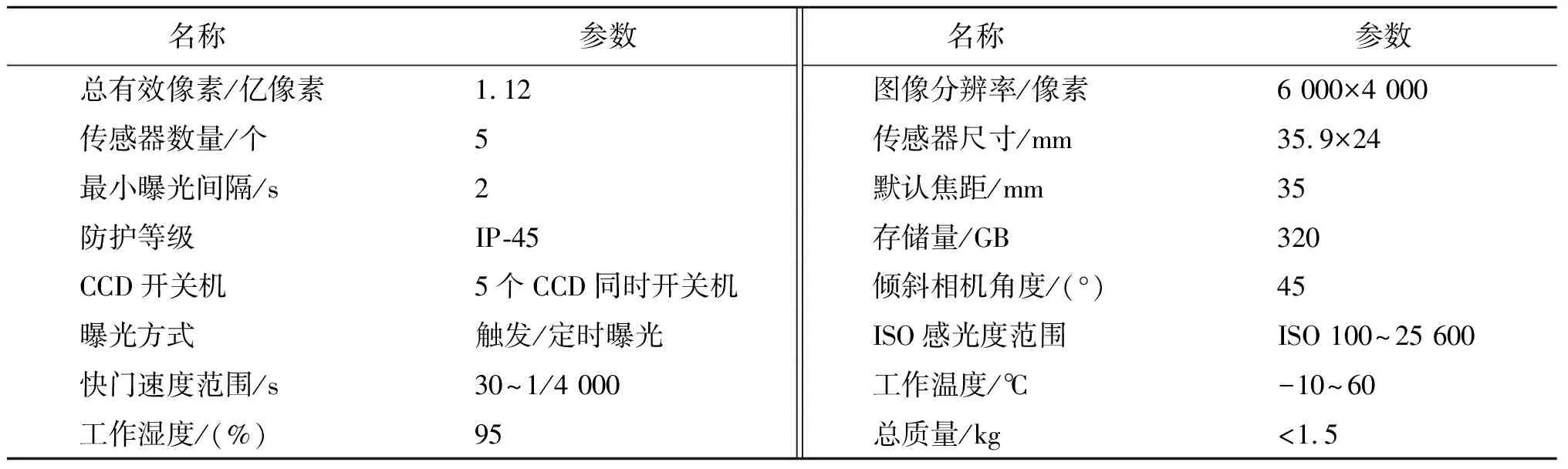
表1 无人机镜头参数
1.3 实验数据获取
1)像控点施测。为保证成图精度,使目标在影像上清晰可见、容易判读,像控点应尽量选择地势平坦区域,避免树下、房角以及阴影等容易遮挡地区。实验提前制作黑白相间的标志作为像控点。像控点的布点采用围绕建筑物均匀分布的方式,建筑物四周均匀布设16个平高控制点,为了验证模型精度,选取其中9个平高控制点参与影像坐标校正,另外7个平高控制点作为检查点验证模型控制点点位精度。像控点测量采用“GPS载波相位差分(real time kinematic,RTK)”定位方法,选用WGS-84坐标系统。
2)不同航线影像采集。通过在地面站系统上设定航线、航高、航向重叠度和旁向重叠度等参数。为研究不同航线对三维建模精度的影响,采用2种不同航线分别进行数据采集。为保证在相同情况下分析不同航线的三维建模精度,此处设置相同的航线参数,其中相对航高为76 m,航向重叠度为85%,旁向重叠度为75%,使得所获影像分辨率都为2 cm。
(1)垂直航线。航线规划时,使长航线方向与建筑物的长条状分布方向相垂直,如图3所示。

图3 “垂直航线”规划图
(2)平行航线。航线规划时使长航线方向与建筑物的长条状分布方向相平行,如图4所示。

图4 “平行航线”规划图
1.4 数据预处理
在进行三维重建之前,首先对所摄照片进行预处理。将每个镜头拍摄的原始影像分别放进同一个文件夹内,剔除不合格的照片,然后对所摄影像进行畸变校正,对曝光过度或曝光不足的影像进行一定的匀色及增强处理,最后整理机载定向定位系统(position orientation system,POS)数据与控制点数据,并统一二者坐标系至WGS 84 UTM 48N下。
2 实景三维模型构建的关键技术
2.1 空中三角测量
空中三角测量是构建实景三维模型中最关键的步骤。采用光束法区域网空中三角测量作为平差的基本单元,以中心投影的共线方程作为平差的基础方程。通过各个光线束在空间的旋转和平移,使模型之间公共点的光线实现最佳的交会,并使整个区域最佳地纳入到已知的控制点坐标系统中[15],即首先利用POS数据作为外方位元素的近似值,以每个光束作为平差的基本单元,利用控制点按照共线条件方程列出误差方程,在全区域内统一进行平差处理,求出每幅影像的外方位元素;再利用外方位元素的新值求解每个点的地面坐标。如此反复运算,直至求解出每幅影像的精确外方位元素和每个点的地面坐标,并生成稀疏点云。
2.2 多视影像密集匹配
通过空中三角测量获取到影像的精确外方位元素,恢复其空间位置,构成立体像对,利用多视影像密集匹配技术,在多幅影像之间识别同名点,生成地物的稠密点云。
2.3 三维模型构建
根据稠密点云构建不规则三角网,生成研究区域的网格模型。最后,对三维模型和纹理影像配准,通过摄影测量的计算机视觉原理,建立空间地物点到各影像的投影关系,筛选出效果最优的目标影像,将其反投影到模型的三角面上,实现三维模型的纹理贴合[16]。
2.4 实验结果
实验流程主要包括空三计算、建立密集点云、生成网格以及贴附纹理等步骤,技术路线如图5所示,三维模型重建效果如图6所示。

图5 Metashape三维建模技术路线

图6 建筑物三维建模各步骤结果
3 不同航线的三维模型建立及精度评定
为研究2种不同的飞行航线对三维建模质量的影响,通过对比分析2个模型的形状、纹理以及空洞程度,并通过具体数值对比2种模型的控制点点位精度,以定性和定量的方式对其三维建模质量进行评价。
3.1 不同航线的三维建模结果
以目标建筑物最终的实景三维模型为研究对象,分别对比分析基于不同航线生成的三维模型在同一部位的细节表现能力。因该建筑物具有结构规整、对称性良好的特性,故在文中仅对建筑物东面和北面进行对比分析,模型对比如图7、图8所示。

图7 不同航线下建筑物东面三维重建结果
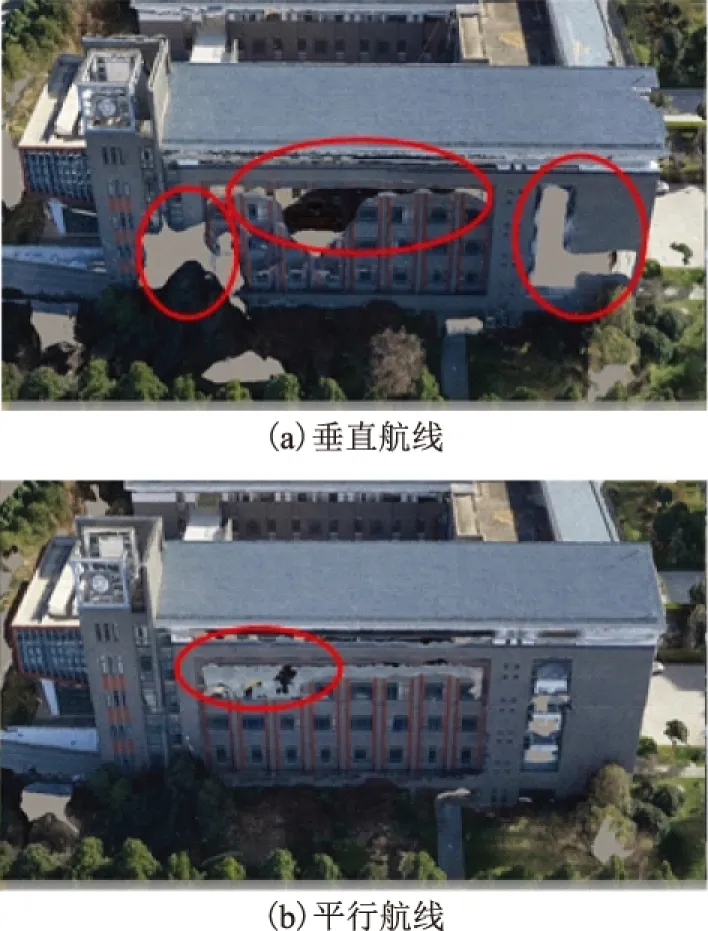
图8 不同航线下建筑物北面三维重建结果
从图7建筑物东面的对比中可以发现,2种方法下三维模型均存在一定程度的纹理缺失,存在较大空洞。相同情况下对比2种方法下三维模型的纹理缺失程度,发现在建筑物左上侧屋檐处,基于“平行航线”建立的三维模型的空洞程度小于“垂直航线”的三维模型的空洞程度,而在建筑物右侧,“平行航线”的三维模型的空洞略大,“垂直航线”的空洞数量较多。故综合而言,在建筑物东面,基于“平行航线”建立的三维模型表现能力略优于基于“垂直航线”的三维模型。从图8建筑物北面的对比中发现,基于“平行航线”的三维模型质量明显更好,模型几何变形小,纹理更加清晰,细节完整,仅存在小部分缺失现象。反观基于“垂直航线”的三维模型,在建筑物里面存在3个较大的空洞,模型完整性较差。
分析上述对比结果,发现在与长航线相对应的方向,三维模型的重建效果较好,原因是无人机在长航线阶段连续曝光摄像,所获照片连续且重叠度较高,有利于识别重叠影像之间的同名点以及点云的构建。由于建筑物呈长条状分布,“平行航线”相比于“垂直航线”能更有效地获取建筑物的全部信息。因此,面对长条状分布的建筑物时,采用与长条状建筑物分布平行的“平行航线”建模方式的模型完整性较好;而基于“垂直航线”建模方式的模型完整性较差。
3.2 点位精度评估
为衡量三维模型控制点的精度,以点位误差为评估指标,其数学表达式如式(1)~式(4)所示。
(1)
(2)
(3)
(4)
式中:δx、δy、δz分别表示x、y、z各方向轴上的点位误差;δm表示整体点位误差;xrtk、yrtk、zrtk表示RTK实测数据;xi、yi、zi表示模型提取数据;n表示点的个数。
在三维模型中选取7个人工控制点,记录其坐标,以RTK实测值作为坐标真值,求出2组模型对比点的误差,结果如表2所示。表中,模型1表示“垂直航线”,模型2表示“平行航线”,Δx、Δy、Δz分别表示x、y、z各方向轴上的误差。
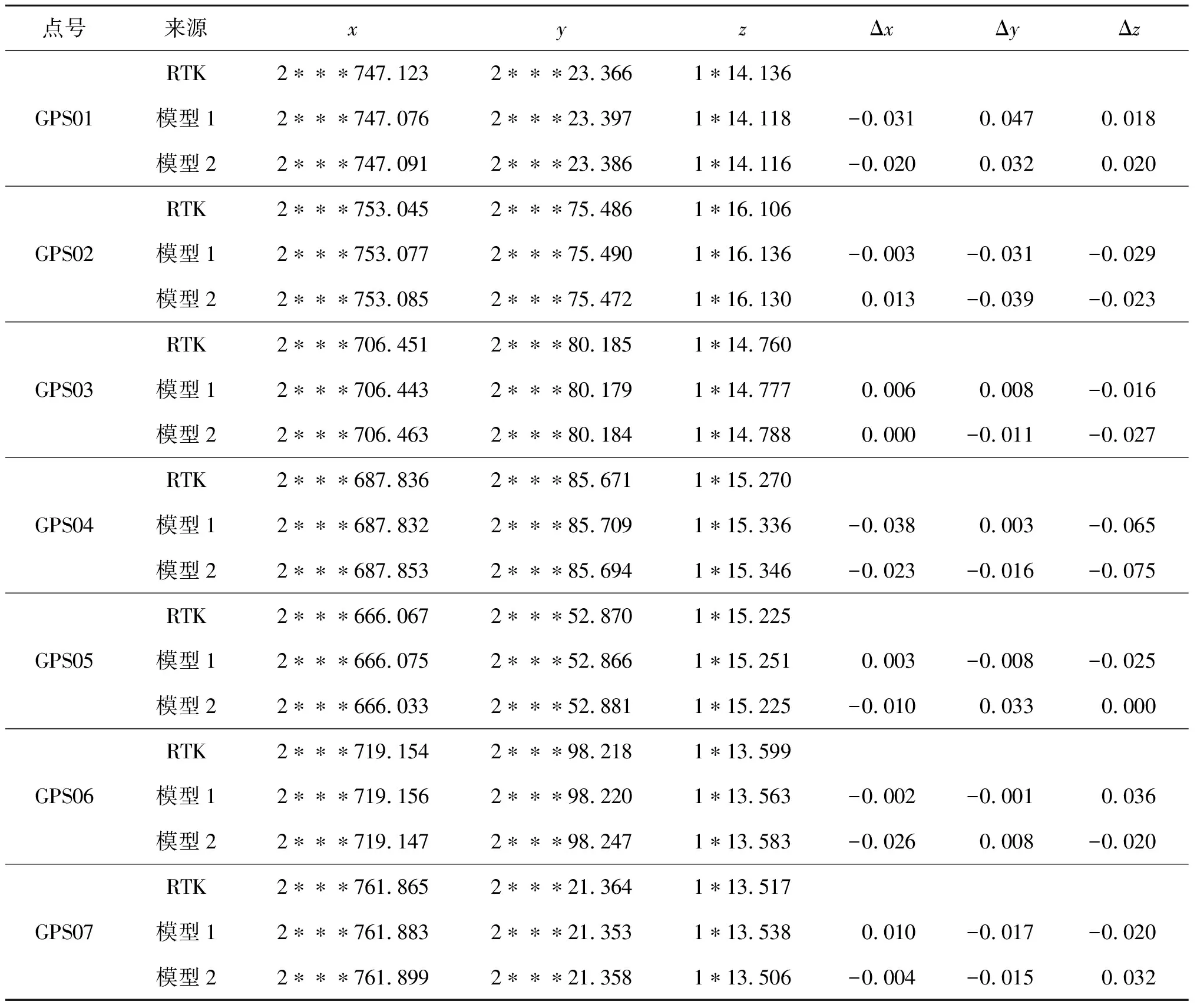
表2 GPS控制点与三维模型提取点的误差 m
按式(4)计算各轴向中误差与整体点位误差,所得结果如表3所示。
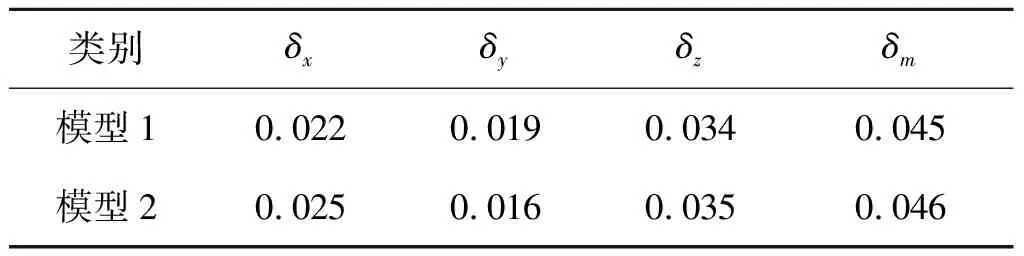
表3 3种模型控制点位误差表 m
通过对比发现,在x轴和z轴方向,模型1略优于模型2,在y轴方向模型2略好于模型1,就整体误差而言,2种建模方式的整体点位误差δm都在0.04 m左右,并且模型1和模型2基本接近。因此,对于控制点点位误差而言,2种建模方式并未对三维模型的精度产生较明显影响。
综合建模完整性及控制点点位精度分析,“平行航线”的三维建模方法优于“垂直航线”的三维建模方法。
4 结束语
以无人机搭载5镜头倾斜相机为数据采集设备,以不同的航线分别对长条状建筑物获取影像,并重建其三维模型,分析“垂直”“平行”2种不同航线对三维模型的影响。实验结果表明,面对长条状分布的建筑物时,在相同情况下,以飞行航线平行于长条状建筑物分布方向的建模方法更好,而飞行航线垂直于长条状建筑物分布方向的建模方法较差,具体分析结论如下:①对模型完整性而言,基于“平行航线”的三维建模方式能获取更多的建筑物侧面信息,其空洞数量较少,基于“垂直航线”的三维模型空洞较多;②从控制点点位精度方面看,“平行”“垂直”2种航线下控制点点位精度基本一致。因此,综合模型完整性以及控制点点位精度2个方面,面对长条状建筑物时,宜采用“平行航线”的三维建模方式。
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28
思维与智慧·上半月(2022年4期)2022-04-08
小哥白尼(神奇星球)(2021年4期)2021-07-22
全球定位系统(2021年1期)2021-03-26
航天制造技术(2020年4期)2020-09-11
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
浙江大学学报(工学版)(2016年10期)2016-06-05
