
基于傅里叶变换轮廓术的动态液膜测量
2020-06-04 05:49管文洁吴庆尉吴迎春吴学成
应用光学 2020年2期
管文洁,吴庆尉,公 超,吴迎春,吴学成
(浙江大学 能源清洁利用国家重点实验室,浙江 杭州 310027)
引言
在热能工程、航空航天工程、空调制冷等领域中,广泛存在着液膜流动现象。例如喷雾冷却中的液膜[1]、柴油机气缸中的油膜[2]以及磁约束核聚变实验堆中的液态金属锂膜[3]等。液膜形成的位置、厚度及流速等能够显著影响工业过程中的流动特性、换热特性、燃烧特性及摩擦特性等性能。比如,航天推力器的燃烧室中推进剂在雾化过程中形成了液膜,对燃烧室壁面温度和内流场有重要影响[4];柴油机气缸油膜变薄易使接触面处于干摩擦状态,从而导致温度升高磨损加剧[2];汽车尾气选择性催化还原系统中,尿素溶液吸附在尾气管壁上,影响SCR 系统的催化反应效率[5]。因此,液膜三维形貌的精确测量对于优化工业过程至关重要。国内外学者借助电导法、半导体激光吸收光谱法和激光诱导荧光法等对液膜的厚度场进行了分析[6-8]。工业过程中的液膜具有流动速度快,变化剧烈,厚度不均匀等特点,适用于动态液膜三维形貌高速精确测量的方法有待进一步研究。
结构光三维形貌测量技术具有非接触,灵活性好,精度高和易于计算机控制等优点[9],被广泛应用于生物医学、人脸识别、显微成像等领域[10-12]。傅里叶变换轮廓术是目前应用最为广泛的结构光相位测量技术之一,由Takeda 等人首先提出[13]。傅里叶变换轮廓术仅需一帧正弦结构光图像,便可重建物体表面三维形貌,可用于测量动态液膜全场形貌。部分学者已经利用傅里叶变换轮廓术,对动态液面涡旋,自由表面水波,溃坝问题中的水流状况等进行了研究[14-16]。但其在应用过程中,存在着各级频谱混叠、受限于表面光学性能等问题[9]。Li 等[17]提出的π 相移法能够提高傅里叶变换轮廓术可测的表面高度斜率变化范围,达到了未改进时的3 倍。Lin 等[18]改进了二维傅里叶变换轮廓术,实现了其对三维砂体形状物体的自动测量。Guo 等[19]在傅里叶变换中采用绝对相位图,取得了较好的相坐标转换精度。孔祥俊等[20]提出了一种椭圆形的二维非对称滤波器,提高了三维形貌的复原精度。高速三维动态过程测量对正弦条纹投影速率提出了更高的要求。普通投影仪进行灰度投影时,投影速率较慢,无法满足高速测量需求。Zhang 等[21]提出了一种利用数字条纹投影技术的超高速结构光三维测量技术,测量频率达到了667 Hz。Liu 等[22]提出的快速算法可以以228.3 帧/s 的频率生成完整的三维坐标点云。王张颖等[23]将并行四颜色通道条纹投影与傅里叶变换结合,可快速重建非连续复杂面形的形貌。二值条纹离焦投影技术[24]能够减小条纹非线性误差,采用数字投影时极大地提高了投影速率,这一方法在实现高速三维动态过程重建上的优势得以展现[25,26]。
尽管前人的研究取得了长足进展,采用傅里叶变换方法对液膜三维形貌进行测量时,仍受到物体表面高度变化率、随机噪声以及条纹频率等限制,且液膜的高速动态测量还受到投影频率的影响。为了研究以上因素对物体表面形貌重建精度的影响,本文选用傅里叶变换轮廓术,对缓变表面和非缓变表面进行了模拟分析,并根据模拟结果优化了实验参数,研发构建了高速三维结构光测量系统,测量了竖直壁面下降液膜的表面形貌,重建了其三维动态过程。
1 基本原理
结构光的测量原理如图1所示。投影仪将正弦光栅图形投影到漫反射物体表面,可利用探测器从另一个方向拍摄,得到受物体高度调制的变形光栅图。傅里叶变换轮廓术能够从变形光栅图中获取受高度调制的条纹相位信息,从而得到物体的三维测量结果。

图1 结构光测量原理Fig.1 Principle of structured light measurement
物体表面高度可由相位差分布 Δ ϕ(x,y)确定[27]

式中:h(x,y)为物体表面高度分布;l0为参考平面与探测器间距;f0为条纹的空间频率;d为投射光轴与探测器光轴间距。
当投射正弦条纹时,探测器获取的条纹分布I(x,y)可表示为[27]

式中:I′(x,y)为背景光强;I′′(x,y)为条纹的对比度;ϕ(x,y)为变形条纹图的相位信息。沿x方向采用傅里叶变换,可得频谱表达式[27]

从频谱中提取基频分量,并进行傅里叶逆变换得函数q(x,y),ϕ0(x,y)代表参考平面条纹的相位信息,则相位差 Δϕ(x,y)为[28]
式中Im 和Re 分别为取虚部和实部的函数。物体表面高度的倒数和相位差的倒数之间为线性关系,可以通过下式来拟合[29]

通过最小二乘法,可确定式中系数a(x,y)和b(x,y)的最优值。
2 模拟仿真
2.1 物体高度变化率的影响
高度变化率是影响傅里叶变换轮廓术可测范围的主要因素之一。Takeda 等[13]提出仅当物体表面高度变化率符合(6)式时,才能通过傅里叶变换轮廓术进行准确的三维重建。

模拟计算中,假设投影仪和探测器的间距d=100 mm ,探测器和参考平面间距l0=100 mm,正弦 条纹的周期为20 像素,探测器的分辨率为500×500 像素。
缓变表面的高度变化率满足(6)式,假设其形状为

假设视场实际大小为50×50 mm2,图2(a)为(7)式的缓变表面实际形貌,图2(b)为受其高度调制后的条纹图。三维结构重建的相位误差分布和高度误差分布如图2(c)和图2(d)所示。三维结构重建的平均相位误差为-4.99×10-16rad,平均高度误差为-1.55×10-15mm。缓变表面的各级频谱之间不易混叠,因此采用傅里叶变换轮廓术可以准确地重建三维结构。
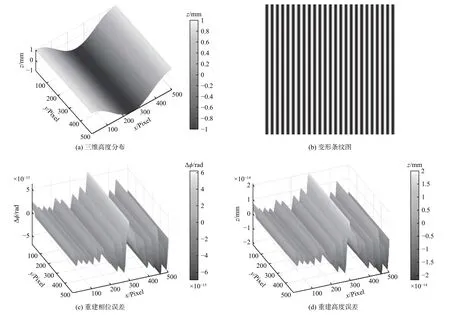
图2 模拟缓变表面Fig.2 Simulation of slow varying surface
非缓变表面的高度变化率不满足(6)式,假设其模拟形状为

假设视场实际大小为60×60 mm2,图3(a)为(8)式所代表的非缓变表面实际形貌,图3(b)为受其高度调制后的条纹图。三维结构重建的相位误差分布和高度误差分布如图3(c)、图3(d)所示,平均相位误差为6.05×10-6rad,平均高度误差为2.09×10-5mm,最大绝对相位误差为0.078 8 rad,最大绝对高度误差为0.25 mm。由图3可以看出,非缓变表面的重建误差在两端急剧增大,这主要是因为矩形滤波窗存在边缘截断误差,导致了吉布斯效应。

图3 模拟非缓变表面Fig.3 Simulation of fast varying surface
2.2 随机噪声的影响
为了研究随机噪声对三维结构重建精度的影响,将均值为0,标准差为σ的高斯分布随机噪声添加到条纹图中。当随机噪声标准差 σ=0.1时,缓变表面和非缓变表面加入噪声后的变形条纹图如图4(a)和图4(c)所示,图4(b)和图4(d)给出了它们的三维结构重建图。由于噪声的存在,重建后的面形变得粗糙不光滑。
对随机噪声标准差 σ为0~0.2 范围内的11 个工况点进行了模拟研究,得到了表面重建误差与随机噪声标准差之间的关系。图5给出了二者的关系曲线。结果表明,三维重建的相位均方根误差和高度均方根误差均与随机噪声标准差成正相关。
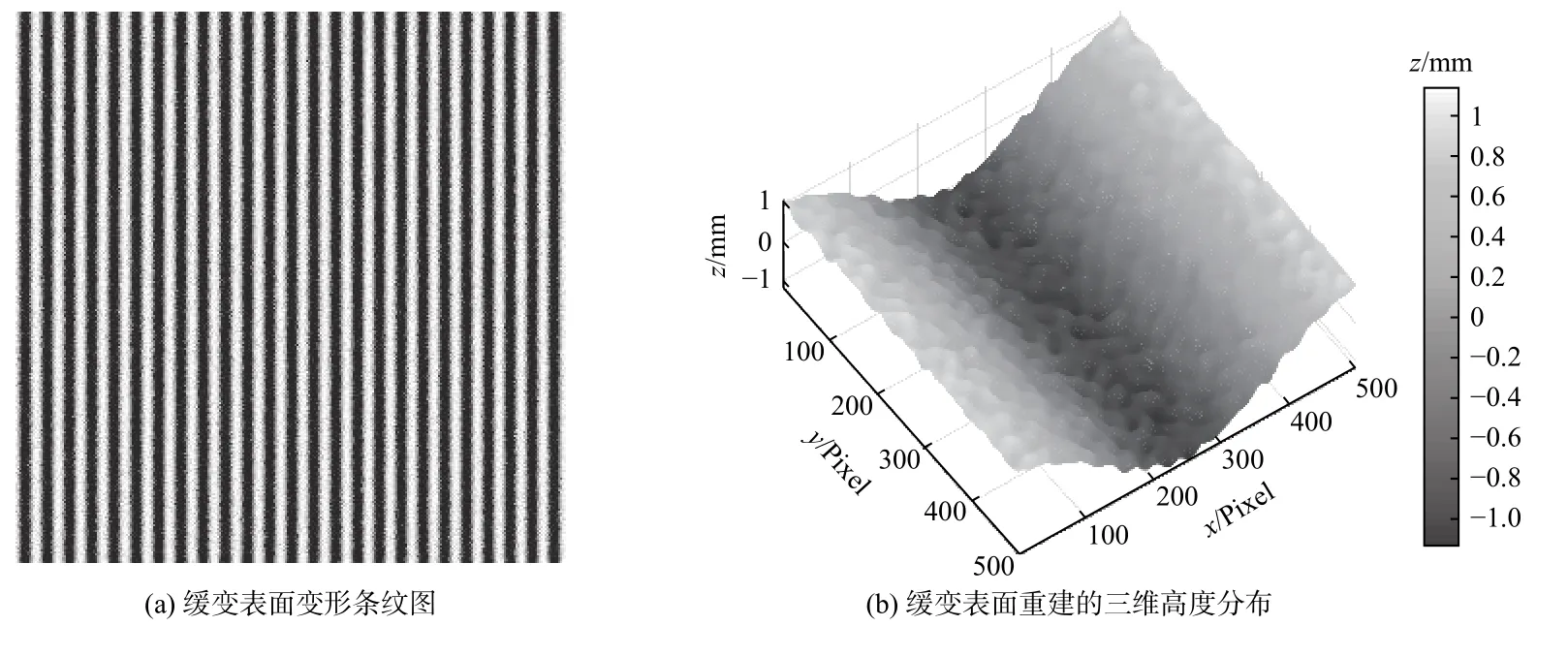
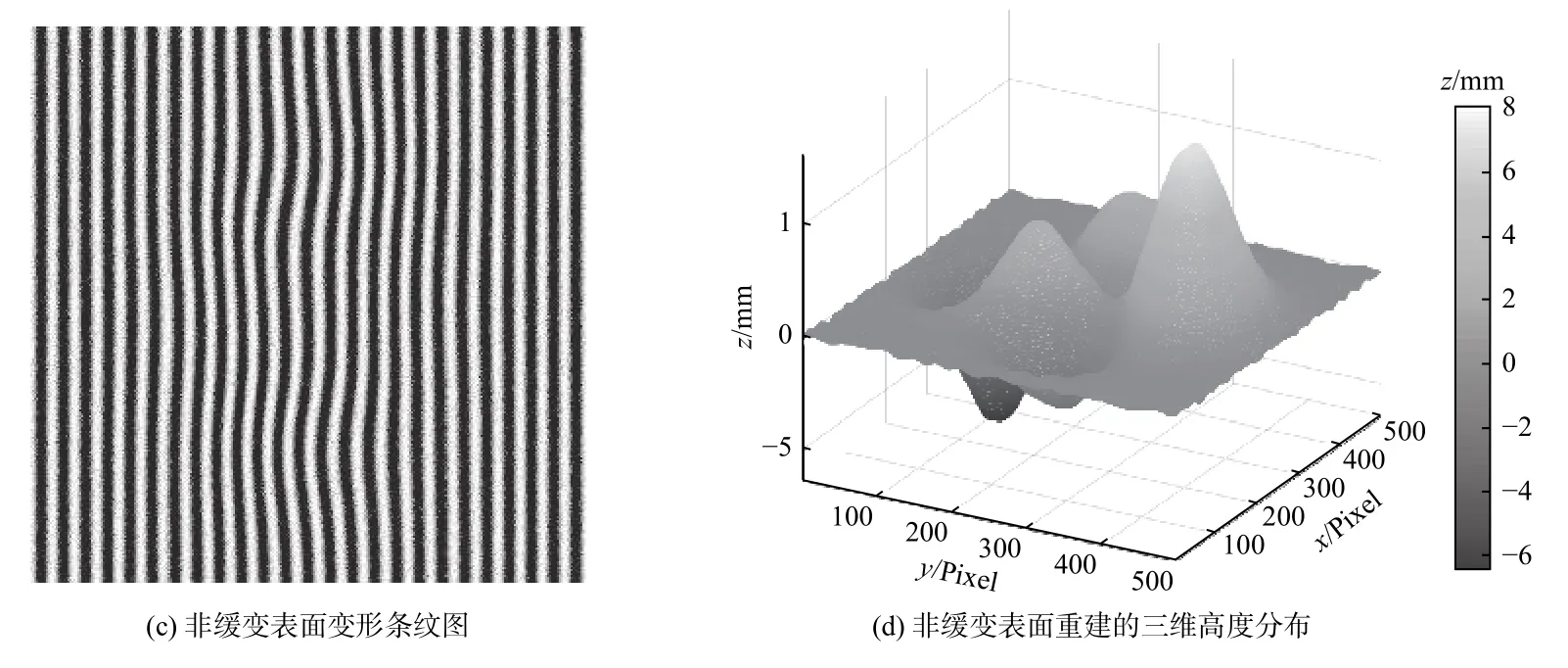
图4 随机噪声下的三维结构重建Fig.4 3D structure reconstruction under random noise

图5 重建误差与随机噪声标准差的关系Fig.5 Relationship between reconstruction error and random noise standard deviation
2.3 条纹频率的影响
针对上述非缓变表面,探测器的分辨率设为512×512 像素,在假设随机噪声的影响可忽略的条件下,研究高度均方根误差随条纹频率的变化规律。模拟中采用矩形滤波窗,窗口半宽为基频与零频间距的2/3。图6给出了高度均方根误差与条纹频率的关系曲线。随着条纹频率增大,重建的高度均方根误差逐渐减小。这是由于条纹频率的增大,致使频谱间距变大,减小了各级频谱之间的混叠的可能性。
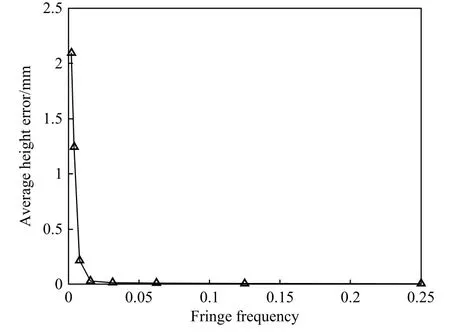
图6 高度均方根误差与条纹频率关系曲线Fig.6 Relationship between height root mean square error and fringe frequency
3 实验结果及分析
图7为动态液膜测量实验装置,采用高速相机(Phantom v2512)和投影仪(德州仪器DLP4500)搭建了高速三维结构光测量系统。投影仪与高速相机之间通过投影仪的触发信号实现同步拍摄。实验测量液体选用水,针对液面反射率低,具有透射性这一难点,采用微小二氧化钛粉末增强水表面的成像性能。下降壁面选取了玻璃板,并在表面喷涂氧化铝薄层,液膜在壁面上的下降速度控制在0.3 m/s左右。竖直壁面下降液膜流动速度快,普通的灰度投影无法达到所需的投影速率。DLP4500 投影仪投影二值图像的最大帧率为4 225 Hz,利用离焦投影技术对黑白二值条纹进行处理,可获取高速投影的正弦条纹,从而满足竖直壁面液膜流动的动态过程测量要求。实验中,高速相机的帧率约为1 600 Hz,投影仪的条纹曝光时间约为330.0 μs。根据模拟仿真结果,投射高频条纹有利于提高测量精度,实验中选择的投射条纹周期为16 像素。
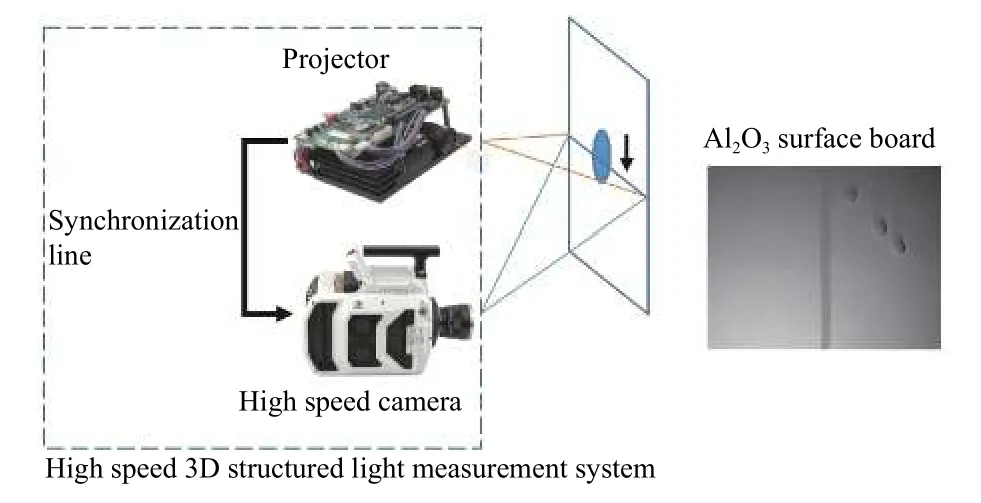
图7 液膜测量实验装置示意图Fig.7 Schematic diagram of experimental device of dynamic liquid film measurement
为验证高度方向的测量精度,实验选取高度为5 mm 的标准量块进行检验。图8给出了量块某截面的高度分布曲线。结果表明高度方向的平均测量误差为0.1 mm,均方根误差为0.081 mm。测量结果与真实值相吻合,具有较高的精度。
图9(a)、图9(b)分别为参考平面条纹图和某时刻t的液膜条纹图。通过对比可以发现,液膜的存在导致条纹出现了变形。图9(c)、图9(d)给出了二者的二维频谱图。采用汉宁窗对基频分量进行分离,求得解包裹后的相位差 Δϕ。进一步对高度方向进行标定,得到其相位分布和三维结构,分别在图10(a)、图10(b)中给出。
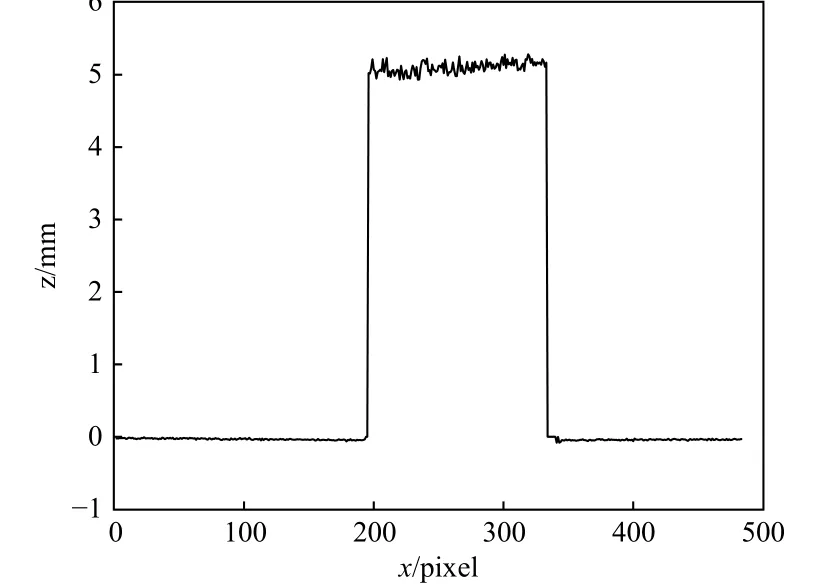
图8 高度5 mm 量块某截面高度分布Fig.8 Height distribution of section of 5 mm gauge block
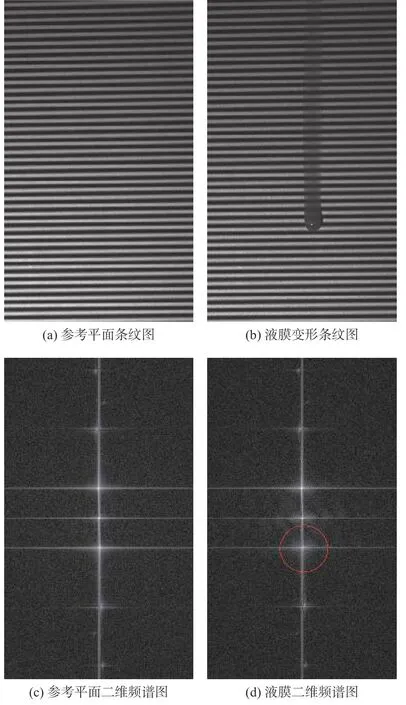
图9 动态液膜测量Fig.9 Dynamic liquid film measurement
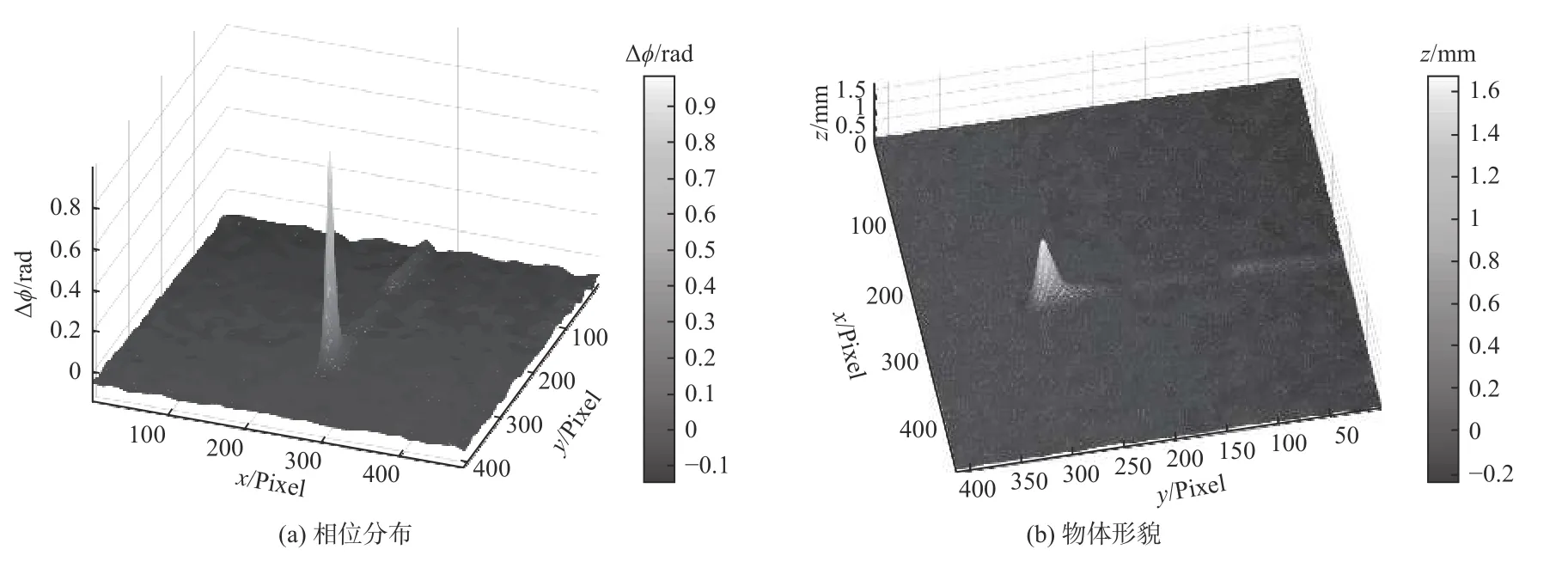
图10 液膜的三维结构重建Fig.10 3D structure reconstruction of liquid film
假设相机初始t=0,t1=12.47 ms、t2=62.47 ms、t3=112.27 ms、t4=162.16 ms,图11 给出了以上4 个时刻的液膜形貌分布图,图12 给出了x方向第260 列的截面形状分布曲线,图中t5=212.06 ms。图12 表明,随着液膜沿竖直壁面向下流动,液膜厚度呈现先增大后逐步减小的趋势。采用高速相机分析液膜的运动形貌变化,能够准确地重建液膜形貌,具有监测绘制动态过程3D 动画的优势。
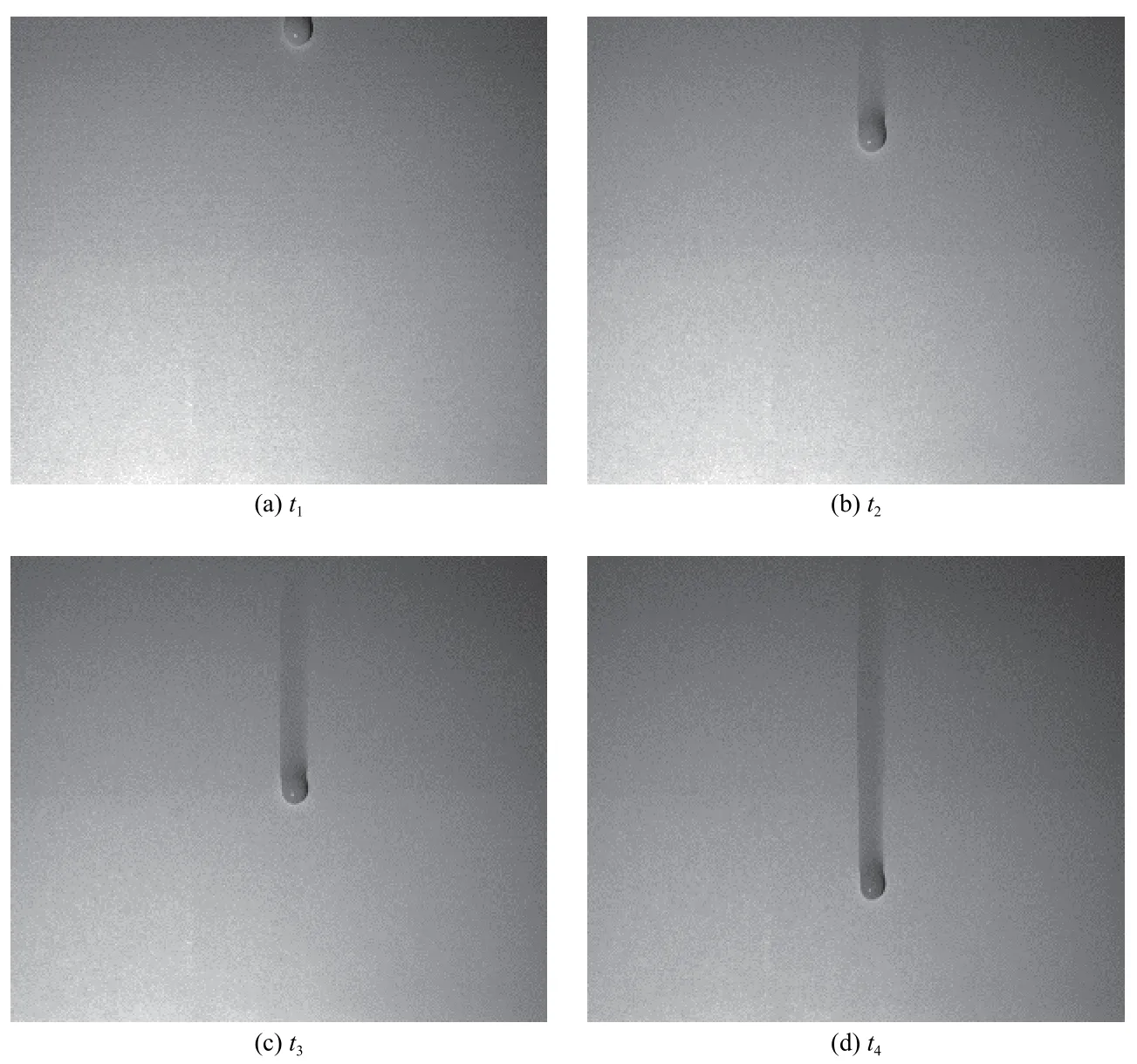
图11 不同时刻的液膜形貌Fig.11 Liquid film morphology at different times
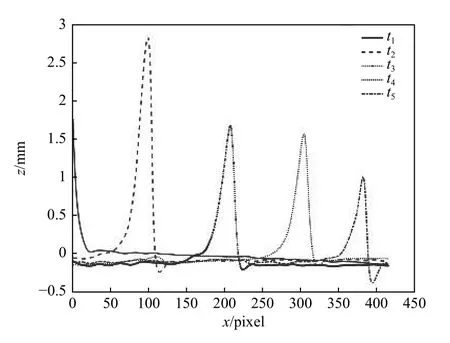
图12 不同时刻下液膜某截面的形貌分布Fig.12 Morphology distribution of section of liquid film at different times
4 结论
基于傅里叶变换轮廓术,研究了物体表面形貌重建精度的影响因素,包括物体表面高度变化率、环境随机噪声以及条纹频率。结果表明,对于高度变化率大于l0/3d的非缓变表面,其重建误差较之缓变表面明显增大。三维结构重建的误差随着环境随机噪声标准差的增大而增大,随着条纹频率的增大而减小。基于模拟仿真结果优化了实验参数,研发构建了高速三维结构光测量系统。使用投影仪高速投影离焦二值条纹,利用高速相机同步拍摄,对竖直壁面下降液膜的表面形貌进行了测量,液膜高度的最大值呈现先增大后减小的趋势。结果表明傅里叶变换轮廓术可以精确测量获得液膜形貌的高速三维动态变化,能够准确地重建其三维结构及其动态过程。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
沈阳航空航天大学学报(2022年5期)2022-02-03
故事作文·高年级(2021年11期)2021-11-28
中山大学学报(自然科学版)(中英文)(2021年3期)2021-05-26
少儿科技(2021年12期)2021-01-20
火箭推进(2020年1期)2020-03-06
发明与创新·中学生(2020年12期)2020-01-11
中国计算机报(2017年36期)2017-10-17
课程教育研究·新教师教学(2015年5期)2017-09-27
浙江大学学报(工学版)(2016年11期)2016-06-05
