基于激光阴影照相系统的研究
2020-06-04 05:49:26史元元张文博杨曼曼
应用光学 2020年2期
史元元,冯 斌,张文博,胥 磊,杨曼曼
(西安工业大学 光电工程学院,陕西 西安 710032)
引言
在武器弹药测试领域,高速弹丸的飞行速度、空间位置、飞行姿态等是其需要测量的重要参数,特别是在高新武器的研制和测试阶段,精确地获取弹丸的飞行参数完成对武器弹药系统的评估非常重要[1-3]。目前,高新武器呈现出高速度、高精确、高损害等新的特点,传统的高速摄影机、光电经纬仪等非接触式测量系统已经不能适应新型武器弹药的测试需求[4-6]。高速CCD 相机因其具有分辨率高、响应快等优点已经成为一种记录弹丸飞行参数的主要设备[7]。将高速CCD 相机和激光光源相结合可以“冻结”高速弹丸,在一帧图像上留下同一个弹丸的多个阴影图像[8]。目前多采用相机一直曝光,被动式激光光源间隔闪烁的方法来获取一个弹丸的多个阴影图像,但是这种方法会产生光能量利用率低、光照不均匀、光路难调节等现象[9-12]。为了解决利用被动式光源测量存在的问题,本文将研究基于高速CCD 相机的激光阴影照相系统,采用了一种组合式主动激光光源进行照明,利用时序控制装置控制激光器闪烁和相机曝光而实现对高速弹丸的“冷冻”,进而获取弹丸的阴影图像[13-15]。文中主要研究了系统的构成和工作原理,建立了弹丸空间位置和飞行速度的数理模型,并搭建了激光阴影照相系统的测试模型;其测试结果表明该系统能够满足对高速弹丸运动参数的测量。
1 系统组成和工作原理
1.1 系统的结构组成
基于激光阴影照相技术的测速系统主要包含5 个组成部分,如图1所示。在激光阴影照相系统的前端放置有光幕靶测速及触发装置,它是由两对红外发射装置和接收装置组成,其中相对靠近枪口的红外光幕Ⅰ同时起着触发作用。当弹丸穿过红外光幕Ⅰ时,输出的触发信号控制时序装置控制CCD 相机和激光器光源在相应的时间段内曝光和闪烁,实现对弹丸飞行姿态的捕捉。2 台CCD 相机拍摄的弹丸图像存储在上位机里,最后通过相关图像算法处理后得到弹丸的飞行参数。

图1 激光阴影照相系统框图Fig.1 Block diagram of laser shadow photography system
1.2 系统的工作原理
基于激光阴影照相系统工作原理图如图2所示,弹丸穿过红外光幕Ⅰ时输出一个代表弹丸穿过靶面的脉冲信号,穿过光幕Ⅱ时,也会输出一个脉冲信号,根据2 个光幕之间的距离和2 个脉冲信号的时间间隔就可以计算出弹丸的飞行速度。而在弹丸穿过光幕Ⅰ时,输出的脉冲信号同时也是时序控制装置的触发信号,当控制装置收到触发信号时启动2 台正交CCD 相机和激光器,时序控制装置通过控制2 台正交CCD 相机的曝光时间和激光器的闪烁时间间隔来实现对弹丸飞行姿态的捕获。当激光器停止闪烁后,2 台正交CCD 相机将不再曝光,此时在每台CCD 相机上捕获了至少2 幅弹丸阴影图像。将拍摄到的图像传送至上位机,利用图像处理和相关算法可得到弹丸的实时空间位置,根据弹丸在阴影图像中的位置以及激光器的闪烁时间来计算弹丸的飞行速度。
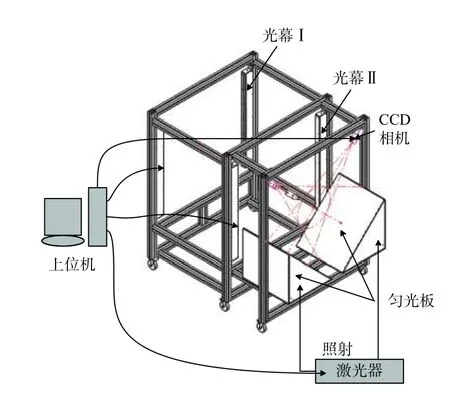
图2 激光阴影照相系统工作原理图Fig.2 Working principle of laser shadow photography system
2 弹丸空间位置求解模型
以弹丸的质心为弹丸空间位置,设弹丸质心为P,当弹丸穿过CCD 相机有效视场时,在左右2 台相机上分别留下质心P的像点为P1、P2,其空间关系图如图3所示。

图3 弹丸空间位置关系图Fig.3 Relation diagram of projectile spatial position
假设质心点P在基准坐标系下的坐标为P(x,y,z),其像点在基准坐标系下的坐标分别为P1(x1,y1,z1)、P2(x2,y2,z2)。 图中O1、O2两个固定点为相机主点,其坐标分别为O1(xo1,yo1,zo1)、O2(xo2,yo2,zo2),则根据图3中的空间关系,弹丸的空间位置P为2 条射线O1P1和O2P2的交点。
结合图3根据空间直线方程的表达形式,选用两点式方程对弹丸的空间位置进行求解,则射线O1P1的直线方程为

射线O2P2的直线方程为

将(1)和(2)式写成线性方程的形式:
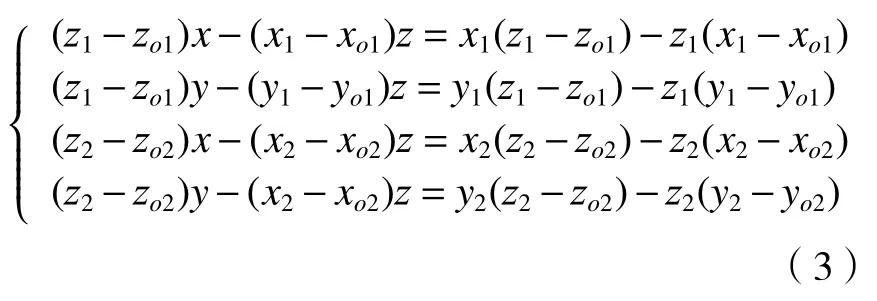
将(3)式写成一般矩阵的形式:

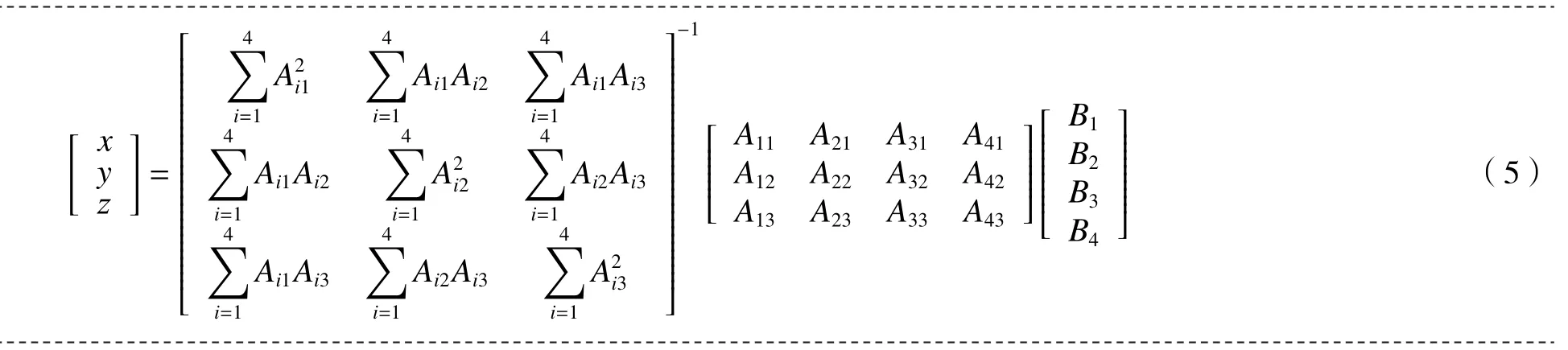
由(3)式可以看出,该方程组的方程数有4 个,未知数有3 个,方程的个数大于未知数的个数,故该方程组是一个矛盾方程组,利用最小二乘法求解得到弹丸的近似空间位置P(x,y,z)。
3 弹丸速度求解模型
弹丸速度是分析武器和弹药性能的一个重要指标,目前弹丸飞行速度主要采用间接法进行测量,即速度通过距离和时间的比值来表达。在理论研究过程中,只有弹丸沿着弹道线方向做匀速运动时,才能将平均速度当作弹丸穿过某点的瞬时速度。但地球上的飞行物体都会受到地心引力和空气阻力的影响,弹丸发射后由于受到这2 个力的作用,实际弹丸的飞行速度呈减速且飞行轨迹呈抛物线。为了简化理论模型,假设弹丸不受地心引力和空气阻力的影响,弹丸则沿着弹道线方向做匀速运动,且轨迹与地面平行。
在该系统中获取弹丸速度的方法主要有2 种:1)通过光幕靶测速及触发装置获取弹丸穿过2 个光幕的平均速度;2)根据CCD 相机拍摄到弹丸阴影图像和激光器闪烁的时间间隔计算弹丸在CCD 有效视场范围内的平均速度。
3.1 红外光幕靶测速模型
红外光幕靶用于测速时,2 个光幕和弹道之间的几何关系如图4所示。光幕Ⅰ和光幕Ⅱ两个探测平面相互平行且垂直于弹道轨迹。设2 个光幕之间的距离为S,弹丸穿过光幕Ⅰ和光幕Ⅱ的时间分别为t1,t2,则弹丸速度可由公式(6)计算得到。

图4 光幕靶测速示意图Fig.4 Schematic diagram of velocity measurement on light screen target
3.2 激光阴影照相测速模型
假设弹丸分别在2 个正交CCD 相机的视场上留下了3 个阴影图像,将代表3个弹丸空间位置的点抽象成平面图,如图5所示。

图5 弹丸阴影图像Fig.5 Projectile shadow image
利用空间2 点的距离公式和速度公式,可以求出弹丸在相机有效视场范围内的平均速度,现假设激光器的闪烁间隔为T、P1,P3两个点的空间三维坐标分别为P1(x1,y1,z1),P3(x3,y3,z3),则P1,P3两点间的速度可由公式(7)进行计算得到。

4 试验分析
整个测试试验系统如图6所示,为了验证该系统的可行性和测试结果的正确性,搭建实验样机进行了模拟测试,并在系统后竖立一个垂直于弹道线的纸靶。整个系统的结构框架参数为:长×宽×高=1 300 mm×500 mm×1 300 mm,红外光幕测速及触发装置中2 个光幕前后相距S=1 500 mm。

图6 系统测试试验图Fig.6 Diagram of system test
弹丸的飞行速度主要通过上述章节提出的2 种方法来测量,对于弹丸目标的识别,本文采用了Pytorch 深度学习框架,由于一帧图像上捕捉同一弹丸的2 个阴影图像,就能计算弹丸的飞行速度,所以在进行测量时利用时序控制激光器进行2 次闪烁。随机选取2 张弹丸目标的识别结果,如图7所示。飞行速度试验结果的数据及对比如表1所示。

图7 弹丸飞行速度目标识别结果Fig.7 Target recognition results of projectile flight velocity

表1 弹丸飞行速度数据对比Table1 Comparisons of projectile flight velocity data
在测量弹丸的空间位置时,激光器进行1 次闪烁就可以满足弹丸空间位置坐标计算。随机进行10 次试验,选取了2 张弹丸目标的识别结果,如图8所示。系统输出弹丸的空间坐标和坐标靶纸读取的弹丸坐标对比结果,如表2所示。

图8 弹丸空间位置目标识别结果Fig.8 Target recognition results of projectile spatial position

表2 弹丸空间位置结果对比Table2 Comparison of projectile spatial position results
从表1可知,利用激光阴影照相技术的测速方法能够实现对飞行弹丸的测量,且与传统测速方法对比误差较小。在激光阴影照相系统后面竖立纸靶时,纸靶平面与Y=500 mm 的平面重合,因此在表2中仅对X轴和Z轴方向的误差进行分析。从表2的数据可知弹丸空间位置的偏移误差最大不超过3.5 mm。在X轴方向的均方差为0.795 mm;在Z轴方向的均方差为0.496 mm。均方差不超过1 mm,说明采用该系统的测量值与真值(靶纸测量值)非常接近,进一步证明该系统能够满足对弹丸的测试要求。
5 结论
本文研究了用于测量弹丸运动参数的激光阴影照相系统,该系统由激光器、高分辨率CCD 相机、匀光板、箱体结构等构成。根据系统的工作原理,建立了弹丸空间位置模型和2 种测速模型。在理论基础上,搭建试验装置完成了对该系统的可行性测试。通过随机10 次的对比试验,其测量误差最大偏差为3.4 mm。在X轴和Z轴的均方差不超过1 mm,误差的偏离程度非常低。证明了该系统可以克服被动式光源存在的光路难调节、光照不均匀的问题,实现对弹丸飞行参数的测量。
猜你喜欢
红领巾·萌芽(2023年8期)2023-07-21 16:22:00
广东石油化工学院学报(2022年4期)2022-09-13 01:36:28
小学生必读(中年级版)(2021年12期)2021-12-02 09:04:43
热带作物学报(2021年1期)2021-02-22 07:31:25
家庭影院技术(2019年8期)2019-08-27 02:44:50
西安工业大学学报(2018年5期)2018-11-26 11:46:20
弹箭与制导学报(2015年1期)2015-03-11 15:32:43
弹箭与制导学报(2015年1期)2015-03-11 15:32:09
装备学院学报(2015年6期)2015-01-10 05:28:52
电脑与电信(2014年3期)2014-03-16 03:38:44