
摩擦不对称耦合布朗马达的定向输运*
2020-06-04 09:45张旭曹佳慧艾保全高天附郑志刚
物理学报 2020年10期
张旭 曹佳慧 艾保全 高天附† 郑志刚
1) (沈阳师范大学物理科学与技术学院, 沈阳 110034)2) (华南师范大学物理与电信工程学院, 广州 510006)3) (华侨大学信息科学与工程学院, 厦门 361021)(2019年12月24日收到; 2020年3月9日收到修改稿)
本文研究了耦合布朗马达在溶液摩擦对称性破缺条件下的定向输运问题. 详细讨论了溶液阻尼系数比,周期外力以及耦合作用对布朗粒子定向输运的影响. 研究发现: 溶液摩擦的不对称性不仅能促进摩擦棘轮的定向输运, 且合适的溶液阻尼系数比还可以使耦合棘轮的定向输运达到最强. 此外, 一定摩擦阻尼条件下外力振幅可以使耦合粒子的定向输运呈现多峰结构. 研究还发现合适的自由长度和耦合强度也能增强摩擦棘轮的输运特性. 研究结果不仅能够启发实验上选取合适的摩擦阻尼来优化布朗马达的输运, 也可为信息容量大、反应速度快的纳米器件的制备提供一定的理论参考.
1 引 言
生物分子马达广泛存在于细胞内部, 它们可将生物体内部的化学能转化为机械能, 并利用细胞内的自由能完成各种输运[1,2]. 例如, 细胞内的Factin 马达、肌球蛋白马达、交联蛋白等它们能够产生机械运动[3], 而动力蛋白和驱动蛋白还能拖动囊泡进行步进并完成细胞内的货物运输[4]. 生物分子马达的这种定向运动对于细胞内的物质运输起着非常重要的作用. 为了深入研究分子马达的运动机制, 人们建立了摇摆棘轮[5−8], 闪烁棘轮[9−12]等大量棘轮模型[13]. 通过研究各类棘轮不仅能够深入理解布朗粒子的定向运动行为[14], 找到其定向输运的优化条件[15], 研究结果还可应用于制备纳米器件等领域.
目前, 关于布朗棘轮定向输运的研究已引起人们广泛的兴趣[16−19]. 如Hojo 等[20]通过研究由气泡状中心束缚力驱动的布朗马达, 发现驱动力作用下的马达输运会优于通常单分子马达的输运行为.此外, Pattanayak 等[21]在理论上研究了周期性障碍阵列作用下布朗粒子的输运, 发现障碍物阵列的周期性分布能促进棘轮的定向输运. 同时, Yan 等[22]还研究了反馈脉冲棘轮模型, 结果表明粒子间的自由长度和耦合强度都能促进棘轮的定向输运. 然而, 上述各类棘轮的研究中大都考虑的是单位阻尼条件下布朗粒子的运动情况. 由于生物体内细胞液的浓度、杂质等都会影响溶液的实际环境[23−25], 因此分子马达受到的介质阻尼通常是变化的. 此外,大量实验研究已表明布朗马达的运动都是通过耦合相互作用拖动负载并进行集体定向步进的[26−28].由此可见, 研究溶液阻尼对耦合布朗粒子运动的影响更具实际意义. 因此将对不同摩擦阻尼条件下耦合布朗粒子的定向输运展开详细讨论. 通过对不同摩擦阻尼影响的研究, 不仅能深入理解以集体协作形式步进的布朗马达的定向输运特性, 而且对于研究摩擦对称性破缺情况下分子马达的能量转化也具有一定的实验启发.
迄今为止, 关于溶液阻尼对布朗马达定向输运影响的研究理论上虽有涉及[29], 但并不深入. 如von Gehlen 等[30]通过研究无负载作用下摩擦对称性破缺溶液环境中棘轮的输运, 结果发现一定条件下的溶液阻尼会减小棘轮的定向输运, 且通过选择合适的阻尼还能诱导粒子的流反转. 此外,Saikia 和Mahato[31]还研究了空间关联摩擦棘轮的输运行为, 结果表明只有在小阻尼条件下布朗粒子才能产生定向运动. 然而, 对于复杂细胞溶液环境中布朗粒子拖动负载时的定向输运问题仍少有研究. 为了在理论上提高不同摩擦阻尼条件下耦合布朗马达拖动负载时的定向输运能力, 深入研究了介质阻尼对反馈耦合布朗粒子定向运动的影响.
本文通过建立过阻尼摩擦棘轮模型, 研究了阻尼系数比、耦合强度和外力振幅等对耦合布朗棘轮定向输运的影响. 研究发现溶液阻尼并不总是阻碍棘轮的定向输运, 合适的阻尼条件还能使棘轮的定向输运达到最强. 此外, 研究还发现阻尼一定时存在多个外力振幅能使摩擦棘轮的定向输运达到极值, 且合适的外力振幅也可以使棘轮的输运达到最强. 所得结果可用于研究纳米尺度下分子马达的可控制备, 以实现马达做功及能量转换等工作.
2 过阻尼摩擦棘轮模型
主要研究摩擦对称性破缺条件下耦合布朗马达在拖动负载时的运动情况, 其动力学行为可由无量纲化的过阻尼朗之万方程描述[32]:

其中t为时间, 两个耦合布朗粒子的位置分别为x1(t),x2(t).γi(i=1,2)为第i个粒子的阻尼系数,α=γ2/γ1为两个粒子的溶液阻尼系数之比, 反应的是摩擦阻尼的不对称度. 模型中两个耦合粒子的摩擦系数通常是不同的, 即摩擦不对称. 此外,虽然方程(1)中两个粒子的摩擦系数γi即不依赖于时间也不依赖于空间, 但是由于马达两个头部的大小不同, 也会造成粒子受到的摩擦力不等, 因此会导致马达的摩擦对称性破缺. 由于耦合粒子摩擦对称性的破缺会导致一个粒子运动快, 另一个粒子运动慢. 因此, 即使在对称势中耦合棘轮也能够产生定向流. 下文通过调节摩擦阻尼系数比α来改变耦合棘轮摩擦的不对称性, 从而研究摩擦棘轮的定向输运行为. 此外, 方程中F(t) 为时变外力,λ为负载,D为热噪声强度, 满足关系D=kBT,kB为玻尔兹曼常量,T为溶液环境温度.ξi(t) 为高斯白噪声, 满足如下统计关系:

方程(1)中外势U(x1,x2;l) 的具体形式为

其中耦合粒子受到的棘轮势Vp(xi) 为

L为棘轮势的周期长度. 同时两个粒子还将受到耦合 相互作用Vin(x1,x2;l) , 其表达式为


图1 摩擦对称性破缺耦合粒子的模型示意图Fig. 1. Coupling particles model with broken friction symmetry.
式中,k为耦合强度,l为弹簧自由长度, 其结构示意图如图1 所示. 图1 中曲线代表棘轮势Vp, 黑色与灰色两个球分别代表耦合粒子x1和x2, 球的颜色代表粒子受到的不同摩擦力. 两个耦合粒子的相互作用通过弹簧来实现. A, B 两组图分别表示棘轮势Vp处于不同的相位, A 组表示耦合粒子处于压缩状态, B 组则表示耦合粒子处于伸长状态. 图1中第1 行表示棘轮势Vp存在时, 耦合粒子分别处于压缩和拉伸状态; 第2 行表示棘轮势Vp消失瞬间耦合粒子所处的状态; 第3 行表示棘轮势Vp消失后, 两个耦合粒子恢复到原长状态. 弹簧回到原长的趋势能够促使耦合粒子运动. 由于粒子x2受到的摩擦力通常小于粒子x1(α<1.0 ), 所以粒子x2的运动会快于粒子x1, 进而耦合棘轮能够形成定向输运.
此外, (4)式中β为一个重要控制参量, 其具体形 式为

其中

表示耦合粒子受到棘轮势的平均作用. 同时, 摩擦棘 轮还将受到时变外力F(t) 的作用, 其表述为

其中A为外力振幅,ω为圆频率, 外驱动力的周期τ=2π/ω.
为了研究负载作用下不同摩擦阻尼对耦合棘轮定向输运的影响, 采用质心平均速度描述耦合棘轮的定向输运行为, 其具体表示为

其中τ为周期时间,n为周期数,t0为初始时刻,nτ表示耦合粒子的演化时间,表示系综平均,表示第i个布朗粒子的平均速度.
采用二阶龙格-库塔算法对方程(1)式进行数值计算, 研究耦合布朗粒子拖动负载时的输运特性随棘轮各参量的变化. 为了得到稳定的系综平均值, 模拟了 1500个轨道, 每个轨道演化 2000个周期,时间步长取h=1×10−3. 文中所有物理量均采用无量纲化参量, 无特殊说明参量取L=1.0 ,ω=π.
3 结果与讨论
3.1 弹簧自由长度l 的影响
为了研究摩擦棘轮的定向输运特性, 深入讨论了负载作用下摩擦对称性破缺棘轮的输运随各参量变化的行为. 首先, 不同热噪声D条件下, 耦合粒子的质心平均速度随弹簧自由长度l的变化关系如图2 所示. 由于外势U(x1,x2;l) 具有平移不变性,即U(x1,x2;l)=U(x1+nL,x2+mL;l −nL+mL) ,n,m ∈Z, 且外势还满足反演对称性, 即U(x1,x2;l)=U(−x1,−x2;−l). 因此耦合粒子的平均速度随自由长度的变化具有周期性. 这与von Gehlen 等[30]研究棘轮输运时得到的结论类似. 为方便起见, 仅研究一个演化周期内耦合粒子的输运随弹簧自由长度的变化情况. 图2 所示的研究结果表明, 在一个演化周期内耦合粒子的质心平均速度随自由长度l的变化会出现极值. 如, 当l=1.0时耦合粒子在一个演化周期内弹簧自由长度最长, 此时粒子间的相互作用最弱, 所以耦合布朗粒子容易跨越势垒形成定向运动. 然而, 在一个演化周期内还存在某一个特定的弹簧自由长度使耦合粒子的定向输运达到最小, 类似的分析可知由于此时粒子间的相互作用最强, 使得耦合布朗粒子很难跨越势垒形成定向运动. 由此可见, 通过选取合适的弹簧自由长度可以增强棘轮的输运. 此外, 研究还发现随着热噪声D的增加, 耦合粒子的输运也会增强,说明一定强度的热噪声也能增强耦合棘轮的定向输运.
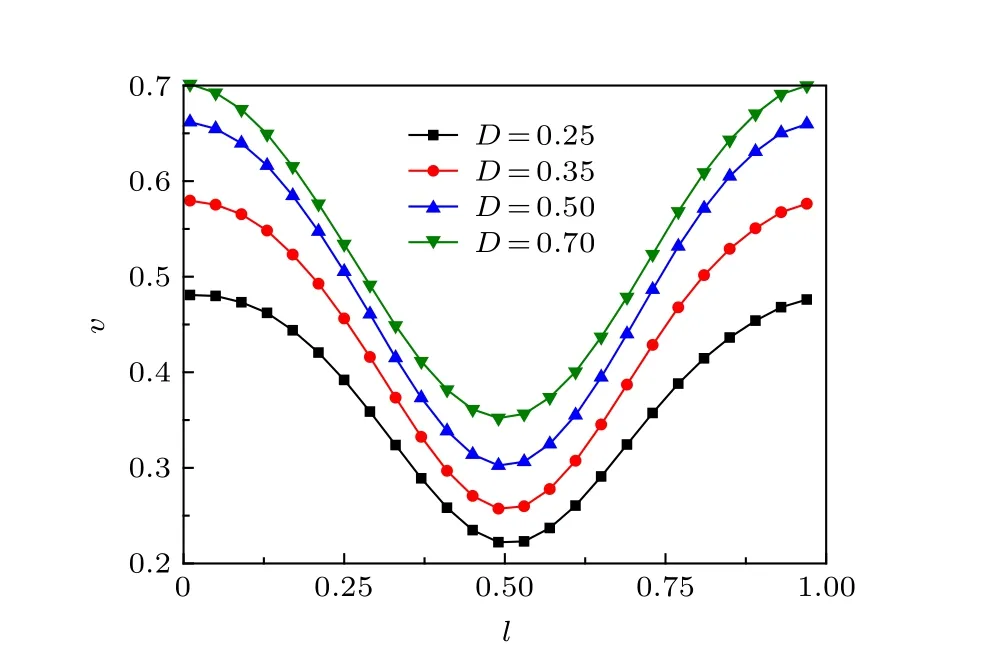
图2 耦合粒子的平均速度 v 随弹簧自由长度l 的变化曲线, 其中g1 = 5.0, k = 20.0, a = 0.3, A = 1.0, l = 0.1Fig. 2. The average velocity v of coupled particles varying with the free length l, where γ 1 =5.0 , k =20.0 ,α=0.3 , A =1.0 , λ =0.1 .
3.2 耦合强度k 的影响
通过上文研究已知粒子间的耦合对于棘轮的输运会产生一定影响, 接下来研究了不同外力振幅A作用下耦合强度k对棘轮平均速度的影响,如图3 所示. 研究结果表明, 在小外力振幅条件下,如A=4时, 随着k的增加, 耦合粒子的几率流单调增加. 然而, 随着外力振幅逐渐变大, 如A>4时, 发现在弱耦合条件下粒子的几率流随k的增加呈非单调的变化关系, 也就是说耦合粒子的定向输运能够产生极值. 有趣的是在较大外力振幅作用下, 如时, 耦合粒子的几率流会由单峰变成双峰结构, 如图3 插图所示. 产生极值的原因主要是由于简谐力与弱耦合作用的相互竞争与协作导致. 由图3 还可以发现在振幅时, 耦合粒子几率流随k变化的曲线都存在峰值, 且随着外力振幅的增加, 曲线峰值对应的优化耦合强度kopt也随之增大. 然而, 随着A的增大各曲线对应的优化耦合强度的间隔 ∆kopt却越来越小, 因此对于不同A值的曲线能够产生交叉现象. 然而随着耦合强度的继续增大, 即耦合粒子的平均速度逐渐增加并趋于稳定值. 这是因为随着耦合作用的不断增强, 其他外力很难与耦合作用进行竞争, 因此耦合粒子的输运最终会趋于稳定. 由此可见, 在一定外力振幅条件下, 通过选择一个或多个合适的耦合强度能够增强布朗粒子的定向输运. 此外, 还发现随着外力振幅A的增加, 耦合棘轮的几率流整体减小, 这说明较大的外力振幅对耦合棘轮的定向输运还会产生抑制作用. 同时, 图3 中外力振幅较大时曲线出现的交叉现象说明外力振幅对耦合棘轮几率流的影响并不是单调的, 所以下文将进一步讨论外力振幅对耦合棘轮定向输运的影响.

图3 耦合粒子的平均速度 v 随耦合强度k 的变化曲线,插图为A =20.0时的变化曲线, 其中 γ 1 =5.0 , l =0.25 ,α=0.3 , D =0.35 , λ=0.1Fig. 3. The average velocity v of coupled particles varying with the strength of coupling k, the insert figure described the average velocity curve when A =20.0 , where γ1 =5.0 , l =0.25 , α =0.3 , D =0.35 , λ =0.1 .
3.3 外力振幅A 的影响

图4 耦合粒子的平均速 度 v 随外力振幅A 的变化曲线, 其中g1 = 5.0, l = 0.25, k = 20.0, D = 0.35, l = 0.1Fig. 4. The average velocity v of coupled particles varying with the amplitude A of external force, where γ 1 =5.0 ,l =0.25 , k =20.0 , D =0.35 , λ =0.1 .
图3 的研究结果已表明外力振幅A对棘轮的输运能够产生抑制作用, 且棘轮的输运随振幅的变化关系并不是单调的. 为了深入研究外力振幅对摩擦棘轮输运的影响, 还详细讨论了不同摩擦阻尼系数比α条件下的几率流随A的变化关系. 由图4 可知, 随着外力振幅A的增加耦合粒子几率流的变化曲线呈现多峰结构, 且在较大的外力振幅条件下, 如A>30时, 曲线逐渐变得平缓并最终趋于稳定. 产生此现象的原因可由棘轮受到外力作用的分析得到, 即在一定振幅条件下, 如A<30 , 此时简谐力会与摩擦阻尼, 耦合作用等其他外力相互协作与竞争, 随着振幅A的增加, 耦合粒子受到的简谐力逐渐增大, 从而棘轮产生的几率流会逐渐变大.由于几率流的增加会导致耦合粒子受到的黏滞阻尼随之增大. 此外, 由于黏滞阻力还会阻碍耦合粒子的定向运动, 因此当黏滞阻力增大到一定程度时, 耦合棘轮的几率流将会减小, 而减小的几率流又将导致耦合粒子受到的黏滞阻力减小. 当溶液的黏滞阻力减小时耦合粒子的定向输运会再次增强.因此耦合粒子几率流随外力振幅A的变化曲线能够呈现多个极值. 然而, 随着A的继续增加, 简谐力逐渐变大, 此时耦合粒子受到的主要外力为F(t) ,而其他外力很难再与简谐力竞争, 因此曲线的波动逐渐变小, 进而摩擦棘轮的几率流会变得更加平缓. 上述结果表明, 在一定条件下存在多个合适的外力振幅使摩擦棘轮的质心平均速度达到极值.此外研究还发现, 随着摩擦阻尼系数比α的增加,摩擦棘轮的输运整体减小, 说明摩擦阻尼对摩擦棘轮的输运也有一定抑制作用. 由此可知, 通过选取合适的外偏置力振幅及溶液阻尼系数比也能增强摩擦棘轮的定向输运. 关于摩擦阻尼对耦合粒子定向输运的影响将在下文进行详细讨论.
3.4 摩擦阻尼系数比 α 的影响
为了进一步研究溶液阻尼对摩擦棘轮定向输运的影响, 研究了耦合粒子的几率流随溶液阻尼系数比α=γ2/γ1的变化关系. 由图5 可得, 随着阻尼系数比的增加, 耦合粒子的定向输运整体减小. 产生这一现象的原因主要是随着α的增加, 将导致γ2增加(γ1是常数). 这就意味着α越大, 粒子2 受到溶液的摩擦阻尼也越大, 因此耦合粒子的几率流会整体变小. 然而, 在一定条件下, 如小负载条件λ<0.54 , 曲线存在两个不明显的拐点. 随着负载λ的继续增加, 如曲线能够产生两个明显的峰值, 图5 中插图仅给出λ=0.6时的速度变化曲线. 产生上述峰值现象的原因主要是由于负载较小时, 负载与阻尼的竞争较弱, 随着负载逐渐变大,如时负载与阻尼的竞争变强, 因而速度曲线的变化会由两个不明显的拐点逐渐变成明显的波峰. 由此可见, 在一定负载条件下通过选取合适的摩擦阻尼系数比也能够增强摩擦棘轮的定向输运.

图5 耦合粒子的平均速度 v 随摩擦阻尼系数比 α 的变化曲线, 插图为 λ =0.6时 的变化曲线, 其中 γ 1 =5.0 ,k =20.0 , l =0.25 , A =20.0 , D =0.35Fig. 5. The average velocity v of coupled particles varying with the frictional damping coefficient ratio α , the insert figure described the average velocity curve when λ=0.6 , where γ 1 =5.0 , k =20.0 , l =0.25 , A =20.0 ,D =0.35.
4 结 论
本文主要研究了摩擦对称性破缺条件下耦合布朗粒子的定向输运行为, 同时耦合粒子还会受到外势的反馈作用. 详细讨论了摩擦阻尼系数比、弹簧自由长度、耦合强度以及外力振幅对耦合布朗棘轮定向输运的影响. 研究发现, 一定的自由长度和耦合强度都可以促进棘轮的定向输运. 同时, 有趣地发现在一定条件下摩擦阻尼并不总是阻碍布朗粒子的定向输运, 合适的摩擦阻尼系数比还可增强摩擦棘轮的定向输运特性. 此外, 研究还发现当摩擦阻尼一定时, 耦合粒子的输运随外力振幅的变化呈现多峰结构, 即存在多个外力振幅能使耦合粒子的质心平均速度达到极值, 这也意味着合适的外力振幅可以使摩擦棘轮的定向输运达到最强. 所得结论不仅可应用于研究ATP 合成、信号传导等生命活动方面, 还可为微观尺度下纳米器件的研制提供一定的理论指导.
猜你喜欢
装备维修技术(2022年7期)2022-07-01
东北大学学报(自然科学版)(2021年1期)2021-01-15
南京大学学报(数学半年刊)(2020年1期)2020-03-19
少儿科学周刊·少年版(2020年9期)2020-03-04
兵团工运(2019年7期)2019-12-13
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年25期)2016-07-23
小雪花·成长指南(2015年5期)2015-05-25
