
电动汽车分布式驱动稳定性协调控制机理研究*
2020-06-02 12:14李翔晟
科技创新与生产力 2020年5期
陈 斗,李翔晟
(1.湖南铁路科技职业技术学院,湖南 株洲 412006;2.中南林业科技大学,湖南 长沙 410004)
1 电动汽车分布式驱动的研究背景
汽车尾气排放所导致的空气污染问题日趋严峻,为了解决该问题,世界各国针对汽车油耗与碳排放制定的法律法规也日益严格。欧盟、美国和日本提出每年的减排率分别为4.4%,4.5%和3.9%,而我国也提出了到2020年实现乘用车5 L/100 km的油耗标准,这意味着我国乘用车每年的减排率为5.5%。由于与传统燃油汽车相比,新能源汽车表现出先天的节能减排和减碳优势,因此各国政府推出了一系列措施推进新能源汽车发展。我国于2016年发布了 《节能与新能源汽车技术线路图》,其中电动汽车是7个重要的核心细分领域之一。国家先后实施新能源汽车补贴政策和双积分制度,是为了加快新能源汽车的健康发展和技术进步。2019年中国新能源汽车产销量超过120万辆,尽管中国汽车产业发展进入了调整期,但新能源汽车长期向好的发展态势没有改变。湖南省是汽车工业后起新秀,2019年湖南省12家整车企业的汽车产量为115.7万辆,其中新能源汽车产量为9万辆,为全省的7.8%。新能源汽车是湖南省重点发展产业,新能源汽车相关技术研究也是湖南省自然科学基金重点支持领域之一。
与集中式驱动相比,分布式驱动减少了传动系统所占空间,对整车布局有益,驱动电机既是执行单元又是信息反馈单元,易于实现一体化控制[1]。在科技进步和广泛实践中,风险与机遇是并存的。由于分布式多自由度执行装置的相互影响,车辆非线性动力学系统中的侧向-纵向耦合复杂,因此必须考虑垂直运动的作用,这给控制系统的设计与实现增加了难度。由于分布式驱动具有过驱动控制系统和耦合动力学的特点,没有旧机械系统的约束,因此其性能可以进一步提高。本文对分布式驱动电动汽车稳定性协调控制机理[2-4]进行研究,提出模型预测方法,实现系统解耦,有效解决车轮转矩的协调控制,无论是在理论研究方面,还是在技术方面,对丰富分布式驱动电动汽车技术理论及其应用实践均具有现实意义。
2 电动汽车分布式驱动研究内容和关键科学问题
2.1 电动汽车分布式驱动的研究目标
该项目根据特定(极限转向)行驶工况下的电动汽车分布式驱动控制特性,研究驱动系统稳定性的协调控制。主要通过分析分布式驱动的特性和要求,创立基于模型预测的永磁同步电机 (Permanent Magnet Synchronous Motor,PMSM)转矩协调控制法。
2.2电动汽车分布式驱动的研究内容
1)根据特定行驶工况,研究车轮等功率分配控制、基于模糊控制的横摆力矩控制以及车轮滑移率相近的控制策略,以提高汽车行驶稳定性。
2)研究PMSM转矩协调模型预测控制法。该方法是在逆变器开关的每个采样瞬间,根据即时测量值,在线得出有限时域的开环优化解,起用控制序列的首个因素,在采样瞬间循环往复,控制分布式驱动转矩之间的动态协调;以CarSim/Simulink创立分布式驱动仿真模型,研究分析驱动系统转矩协调控制特性。电动汽车分布式驱动主要研究内容的整体逻辑结构见图1。驾驶员先给出一个输入信号(方向盘转角或力),分别送到失稳判断模块、安全目标模块和动态协调控制模块。经过失稳判断模块后,如果存在失稳可能,则根据动态协调控制模块,依据汽车运行状态参数 (质心侧偏角和横摆角速度)和道路状态参数 (附着系数和滑移率)计算出转矩[5-7],将算出的转矩送入电机控制系统,根据转矩优化策略调节转矩以控制汽车驱动转矩;如果满足稳定,则根据期望的状态目标值,输入横摆稳定控制模块分别协调转矩和转角,以此控制车辆驱动的滑移率和转向的质心侧偏角,保持期望的行驶状态,完成一次循环[8-12]。
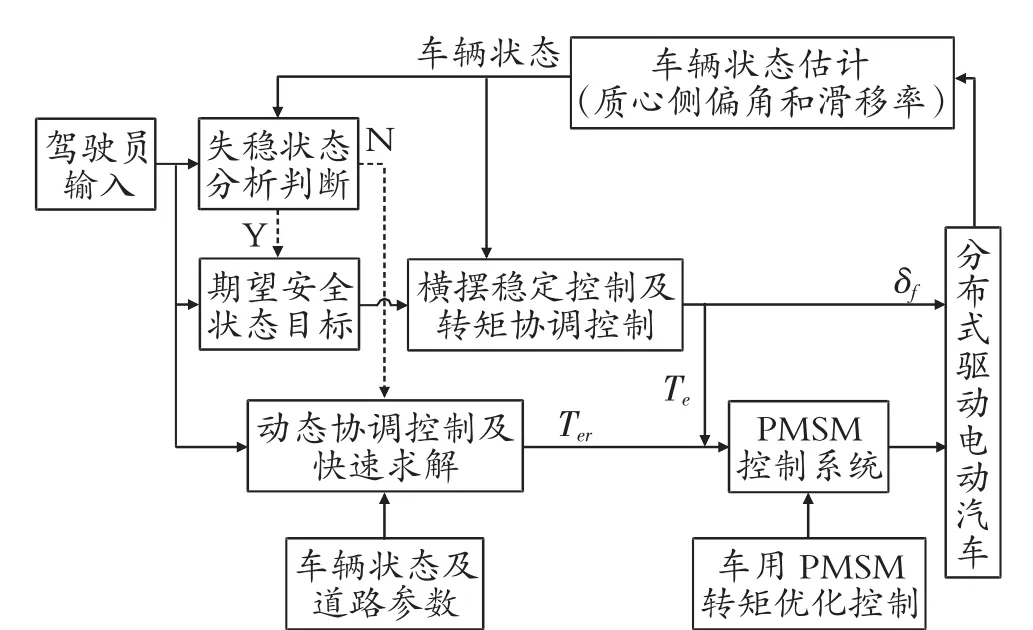
图1 电动汽车分布式驱动主要研究内容的整体逻辑结构
2.3 电动汽车分布式驱动研究解决的关键问题
1)双层架构的整车控制模型 (见图2)。由于分布式驱动控制系统之间具有耦合特点,因此该项目将研究建立上层为驱动力分配层、下层为基于逻辑门限的滑移率控制层的双层架构的整车控制模型和方法。通过上下层模型算法,在更为本质的层面上研究双层架构的整车控制模型本身的特征及控制机理,为采取措施实现驱动稳定性协调控制提供更有针对性的理论依据。这是实现控制系统有效性的关键。
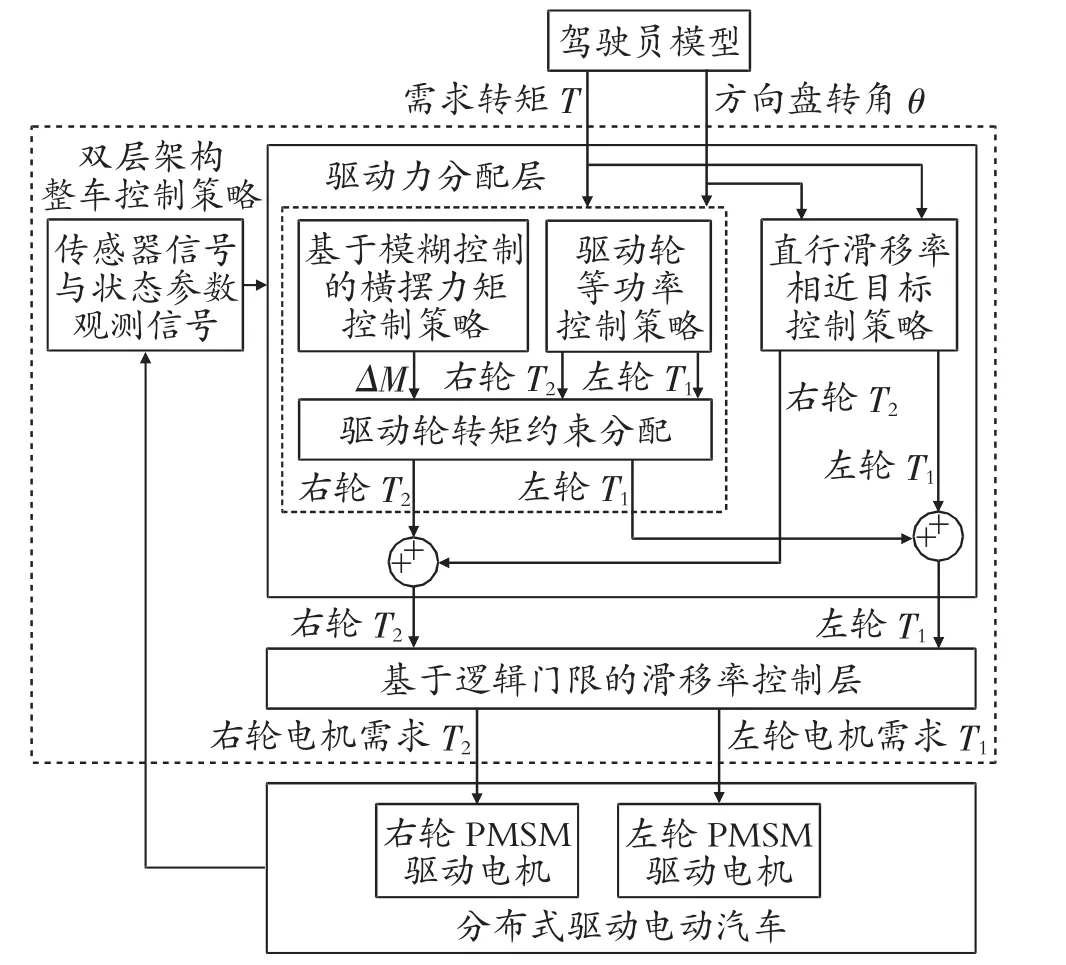
图2 双层架构的整车控制模型
2)转矩协调预测控制方案。为解决分布式驱动系统中驱动/制动、转向等耦合及制约问题,结合预测控制可处理带约束多变量多目标优化问题的特点,提出了转矩协调预测控制方案,实现分布式驱动的多目标动态解耦和协调分配,从而提高整车稳定性能。
3)基于有限控制集模型预测控制 (Finite Control Set-Model Predictive Control, FCS-MPC) 的PMSM转矩控制算法。研究基于FCS-MPC的PMSM转矩控制及其之间的分配是实现稳定驱动和控制协调精度的关键问题。分布式驱动稳定性主要取决于车轮上的转矩大小以及车轮之间的转矩协调分配。
由于车用PMSM电机设计饱和程度较高,控制具有非线性和实际约束特性,因此为使底层驱动单元PMSM满足车辆频繁变化的动力需求,提出以逆变器开关为核心的基于FCS-MPC的PMSM转矩控制算法,建立针对非线性、实际约束和多系统控制的设计方法,以实现转矩准确快速动态响应和分布式驱动协调控制稳定需求。
3 电动汽车分布式驱动的研究方案
3.1 电动汽车分布式驱动的研究方法
1)采用功率平均分配控制理论进行分析。通过分析电子差速原理,建立车辆行驶过程的动力学方程。首先,根据驾驶员加速踏板 (节气门开度)和踏板力,获得驾驶员需求的总驱动转矩T;其次,根据左右驱动轮电机反馈的转速 (n1和n2)和初始平均分配驱动转矩T/2,计算出左右车轮驱动电机的需求功率P1与P2;最后,依据驱动轮等功率分配控制策略 (见图3)原则,运用平均分配的功率 (P1+P2)/2以及实时反馈的左右车轮电机转速(n1和n2),对左右车轮电机的驱动转矩进行调整控制,输出两侧驱动电机实际需求的驱动转矩T1_power与T2_power。
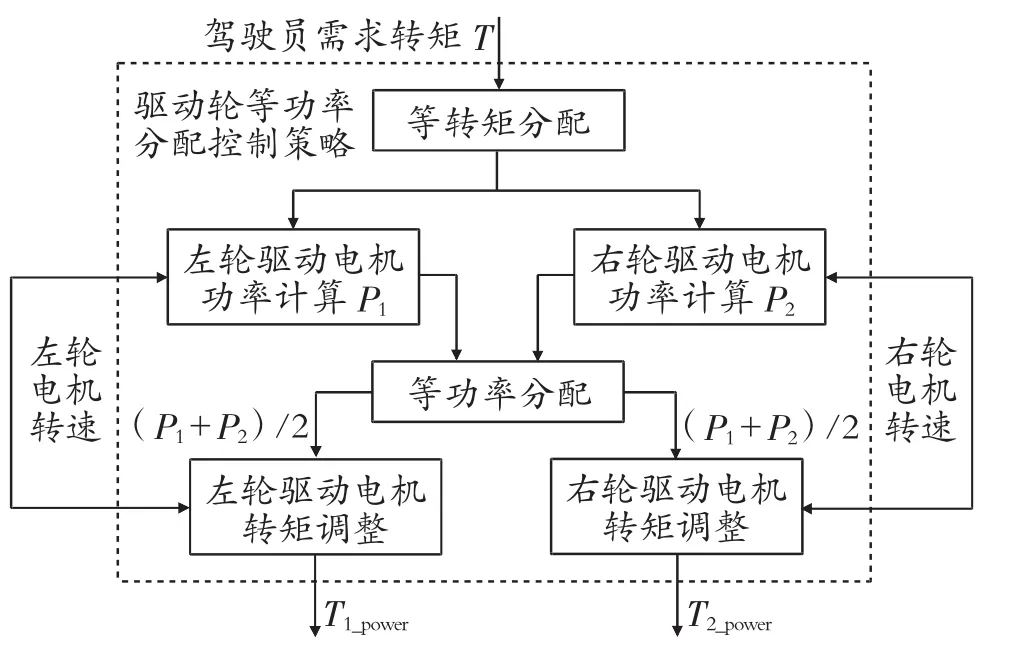
图3 驱动轮等功率分配控制策略
2)横摆力矩模糊控制。汽车稳定控制包含汽车的机动稳定性与轨迹保持能力,汽车的机动稳定性通常用横摆角速度来表示,一般用质心侧偏角表示汽车的轨迹保持能力。通过分析汽车稳定控制目标,选择横摆角速度和质心侧偏角为控制参数,采用基于模糊控制算法设计横摆力矩模糊控制策略(见图4)。由传感器测得汽车状态输入参数 (车速和方向盘转角),由二自由度参数输出汽车目标质心侧偏角和目标横摆角速度,与状态观测器估计获得的横摆角速度和汽车实际质心侧偏角进行比较。模糊控制器的输入量有两个:横摆角速度偏差值和质心侧偏角偏差值;输出量有一个:汽车需求的附加横摆力矩。
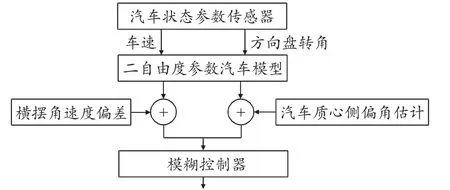
图4 基于模糊控制算法的横摆力矩模糊控制策略
3)应用了基于逻辑门限的滑移率控制。滑移率控制通过调节限制驱动车轮转矩,使得车轮不发生过度滑移与滑转。根据轮胎附着椭圆,分析车轮的纵向作用力和侧向作用力,并以峰值附着系数为依据,建立考虑路面附着系数的车轮转矩约束,进而建立应用了基于逻辑门限的滑移率控制层的控制方法。具体而言,通过分析PMSM与三相逆变器的系统机理,以转矩跟踪为目标,并考虑电流安全约束和离散开关范围约束,设计基于FCS-MPC的PMSM转矩控制策略,控制底层驱动电机,有效实现整车控制器的转矩指令协调。图5为电机控制策略;图6为转矩优化控制算法流程图,描述了转矩优化控制算法的实现过程。
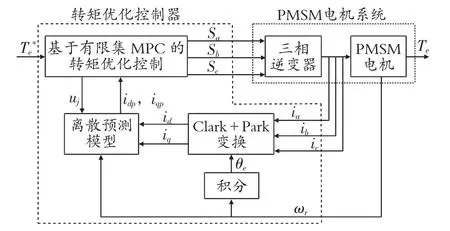
图5 电机控制策略
3.2 电动汽车分布式驱动研究的技术路线
根据功率平均分配控制、横摆力矩模糊控制、逻辑门限滑移率控制等研究方法,制定了电动汽车分布式驱动项目研究的技术路线 (见图7)。
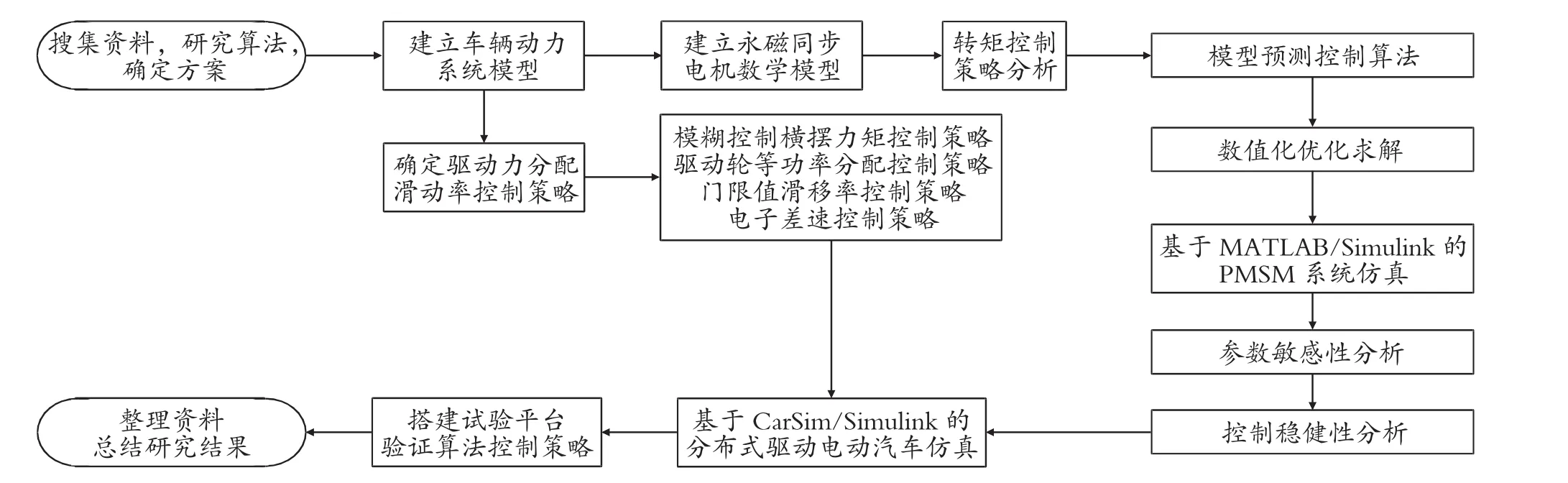
图7 电动汽车分布式驱动项目研究的技术路线图
1)通过车辆行驶动力学与多自由度车辆动力学模型分析,建立上层为驱动力分配层、下层为基于逻辑门限的滑移率控制层的双层架构的整车控制模型。
2)通过PMSM数学模型分析,设计基于FCSMPC的电机转矩预测控制策略;根据V模式开发流程,给出基于模型设计的PMSM预测控制的实现步骤与所需算法工具。
3)分别建立基于CarSim/Simulink的分布式驱动仿真和基于MATLAB/Simulink的PMSM仿真与预测控制系统模型。
4)根据V模式开发流程,结合实验室硬件平台,通过自动代码生成,验证PMSM转矩控制策略的可行性。
5)基于建立的仿真和试验平台,对比分析不同行驶工况下的车辆性能,验证该项目制定的整车控制策略的有效性。
3.3 电动汽车分布式驱动研究的实验方案和手段
针对仿真与工程应用,电动汽车分布式驱动研究采取离线仿真、在环仿真等实验方案和手段。
3.3.1 离线仿真
在算法研究阶段,采用CarSim/Simulink创立整车分布式驱动仿真模型,基于MATLAB/Simulink创立PMSM数学模型,设计整车控制策略,研究电机转矩控制算法,通过仿真分析证明算法的理论可靠性。
3.3.2 在环仿真
通过比较实验与仿真的结果,得到所设计模型和算法与设计目标之间的差异,为充实理论研究指明方向,有助于完善模型和算法。其中,设法满足在环仿真环境对模型和算法提出的特定要求,如实时性对采样步长的限制等,是该阶段研究的关键。
3.3.3 工程应用
借助于机试验平台,探讨工程应用。
首先,将在环仿真获得的可执行代码移植到作为系统控制核心的目标机中,完成实际系统的计算机代码下载。
其次,利用监测设备监控系统运行,以验证试验结果。
最后,围绕抗干扰性、实时性和稳定性等指标完成试验,以进一步完善该项目提出的理论与方法,为后续的推广与应用奠定基础。
在实验阶段,在设计整车仿真模型结构和实验结构的基础上,根据控制方案和实验测试原理,采用所提出的控制策略和控制算法进行行驶工况模拟实验,从而验证其有效性。
4 结束语
通过以上讨论可知,电动汽车分布式驱动稳定性协调控制机理研究具有以下特色与创新之处。
1)提出了双层架构的整车控制模型。针对分布式驱动系统中的驱动、制动和转向等耦合及制约性,提出了上层为驱动力分配层、下层为基于逻辑门限的滑移率控制层的双层架构的整车控制模型,针对控制层中不同功能需求采用了等功率分配控制、模糊控制等不同的控制策略和控制算法,实现了驱动稳定性协调控制。
2)提出了基于FCS-MPC的PMSM转矩控制算法。针对车用PMSM设计饱和程度较高、系统中存在参数非线性等问题,提出了基于FCS-MPC的PMSM转矩控制算法。基于该算法,可实现解耦和多目标优化,提高了电机转矩响应、工作区效率和分配控制。
猜你喜欢
选煤技术(2022年2期)2022-06-06
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
电机与控制学报(2018年9期)2018-05-14
北京航空航天大学学报(2017年1期)2017-11-24
科技创新导报(2016年20期)2016-12-14
空间控制技术与应用(2015年4期)2015-06-05
中国信息化·学术版(2013年4期)2014-01-03
