
气吸式辣椒精量穴直播机的研制与试验
2020-06-02 08:53姚腊梅杨禹锟黄登攀方龙羽莫泽文
华南农业大学学报 2020年3期
曾 山,姚腊梅,李 凝,杨禹锟,黄登攀,方龙羽,莫泽文
(1 华南农业大学 工程学院/南方农业机械与装备关键技术教育部重点实验室,广东 广州 510642; 2 贵州省山地农业机械研究所,贵州 贵阳,550001)
辣椒是一种重要的鲜食蔬菜和调味品原料,同时也是重要的工业原料,辣椒素、辣椒红素在化工和医药等方面都有特殊的用途[1-4]。据统计,辣椒年种植面积213.96 万hm2,产值700 亿元[5-7],在我国蔬菜生产中占据极其重要的地位,主要分布在河南、新疆、江西、贵州和湖南等地[8]。
在市场需求不断增长的推动下,辣椒产业呈现基地化、规模化和区域化快速发展等特点[9]。然而辣椒种植普遍采用人工育苗及移栽方式,存在成本高、劳动强度大和生产效率低等问题。随着农村劳动力输出和人口老龄化趋势加快,劳动力紧缺矛盾日益突出,严重制约了辣椒产业的发展,亟需研究高效辣椒种植技术及配套机械。辣椒精量直播省去了育苗和移栽等环节,省工省力、节本增效显著,近年来该技术发展较快,具有较好的推广应用前景。
国内外专门针对辣椒播种机械的研究较少,通常采用蔬菜播种机播种,欧美地区以大型化、高效化的气力式蔬菜直播机为主[10-11],能实现高速精量播种,伤种率低,但对种子分选清洁度要求高。主要代表机型有美国MONOSEM(满胜) 公司的NGPlus系列蔬菜精量播种机、英国StanHay 公司的5-780型蔬菜直播机以及意大利马斯奇奥公司的Orietta型和Olimpia 型气吸播种机等。日本、韩国辣椒直播机具有小型化和播种行数可调等特点,适合小面积种植作业,根据种子形态大小和农艺要求,多采用槽轮或窝眼轮式排种轮。主要代表机型有日本矢崎公司的SYV 系列蔬菜播种机、韩国Rool clean seeder 手推式蔬菜条播机和韩国 “播兰特”系列蔬菜播种机等[12-13],机械式排种器播种精度低,且排种轮转动过程中易伤种,影响发芽率[14-15]。
国内蔬菜直播机主要有小型手推式、自走式(电动与油动)及悬挂式机型[16],以机械式排种器为主。山东省宁津县发达机械厂研制了一种外槽轮式辣椒播种机,由于辣椒种子体积小、呈圆片状,与棉花、花生种子差异较大,存在播种量大、成穴性差等问题;河北省衡水矿山机械厂与冀州市农机局联合开发了2BLP-3 型辣椒点水铺膜穴播机,采用地轮滚筒联体舀勺地引式精播器,播种量为4~8 粒/穴,不能满足精量播种的要求[17-18]。为解决辣椒高速精量播种的问题,中机美诺科技股份有限公司研制了2BJ-4/5 型气吸式蔬菜播种机,可播种胡萝卜、洋葱和辣椒等小粒蔬菜种子[19];黑龙江德沃科技开发公司研制了2BQS-8/8X 型气力式蔬菜直播机,解决了漏播现象,保证了出苗率,但该机存在作业能耗大、播种质量受机器振动影响等缺陷[20]。
因此,本文针对辣椒机械化种植存在的播种量大、成穴性差、劳动强度大和生产效率低等方面的问题,结合辣椒种植农艺要求,在参考国内外先进技术的基础上,研制了一种气吸式辣椒精量穴直播机,并进行了田间试验,以期为实现辣椒的轻简化栽培推广提供参考。
1 整机结构与工作原理
气吸式辣椒精量穴直播机要求能一次完成开沟、播种、覆土和镇压等多项作业;满足不同的辣椒种植模式和农艺要求,播种行距、穴距和深度可调,保证种植密度;播种量为1~3 粒/穴。
1.1 整机结构及工作原理
气吸式辣椒精量穴直播机主要包括悬挂机架、负压风机、播种装置、开沟装置、覆土镇压装置和动力传动系统等,可同时完成开沟、播种、覆土和镇压等作业,结构如图1 所示。开沟装置主要包括双圆盘开沟器和落种机构,布置在排种管正下方;覆土镇压装置由镇压轮和镇压深度调节机构构成,可调式凸面橡胶镇压装置位于机架的后下方,随着机具前进对土壤进行镇压起到保墒作用;播种单体通过平行四杆仿形机构实现独立仿形,可根据播种行数和播种行距需求组合单体数量和单体间距离。

图 1 整机结构三维图Fig. 1 Three-dimensional diagram of the whole machine structure
气吸式辣椒精量穴直播机通过三点悬挂装置与拖拉机挂接,田间作业时,拖拉机牵引机具,带动播种机地轮同步转动,动力通过链传动和穴距调整系统传递,带动气吸式辣椒精量排种器的排种盘转动,在负压作用下实现吸种、携种和断压排种等过程,种子通过排种管落入双圆盘开沟器所开的沟槽中,镇压轮将回落的土壤向沟槽中间挤推压实,实现种子的覆土镇压。一次性完成开沟、播种、覆土和镇压作业。
1.2 主要技术参数
气吸式辣椒精量穴直播机采用单垄双行种植方式,其对应的农艺要求如图2 所示。
实际生产中,垄高为200 mm,垄面宽度为700 mm,播种深度可调范围为10~30 mm,播种沟宽度为60 mm,播种穴距可调范围为150~250 mm,播种行距可调范围为400~550 mm。
辣椒精量直播机整机主要技术参数包括整机尺寸(长×宽×高)1 700 mm×1 200 mm×1 200 mm,整机质量约为85 kg,配套动力15~22 kW,作业速度0.5~1.0 km/h,生产效率为0.603~1.206 hm2/h,播种2~4 行。
2 关键部件设计
2.1 气吸式辣椒精量排种器结构及工作原理
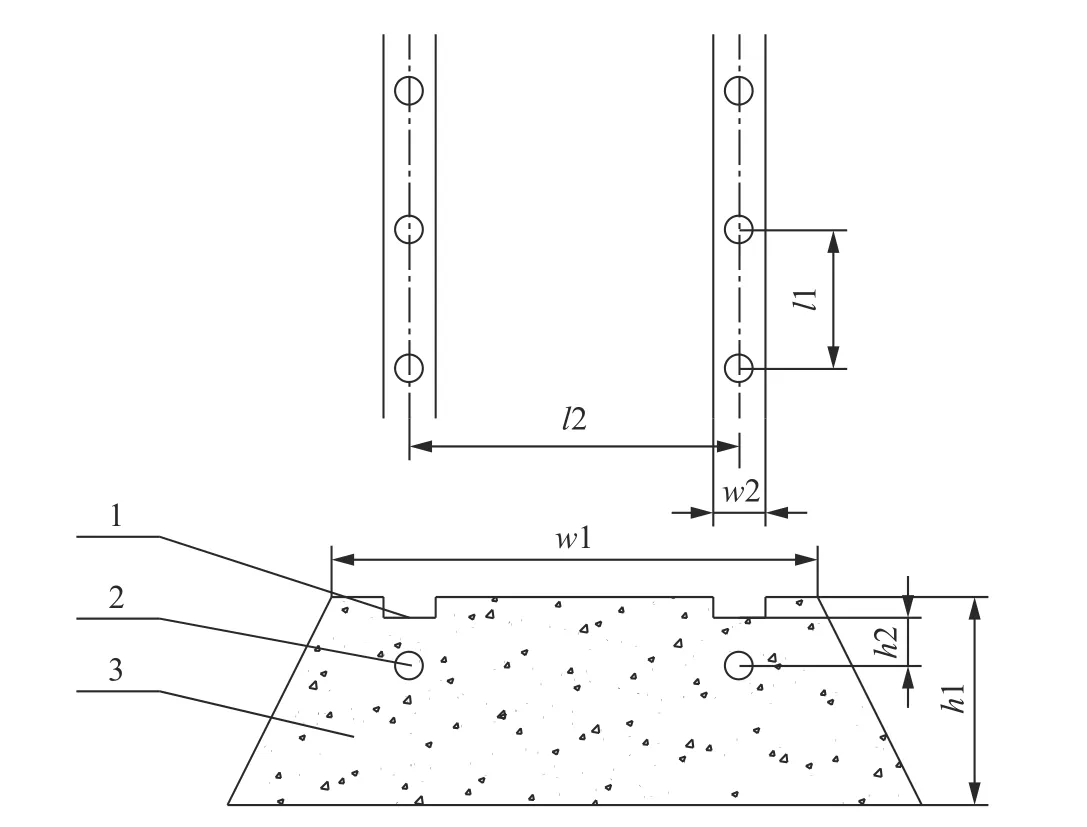
图 2 辣椒直播种植农艺Fig. 2 Direct planting agriculture of pepper
为满足辣椒精量穴直播的农艺要求,本文设计了一种气吸式辣椒精量排种器,由种箱、进种盒、排种器壳体、排种口、排种盘、气室壳体、排种轴和负压进气口等组成,如图3 所示。排种器采用负压吸附原理,作业时排种轴带动排种盘转动,将种子吸附在排种盘的排种孔上,当转到负压阻断凸台时断压排种,种子进入排种管后落入种沟内,完成排种作业。
2.2 排种盘设计
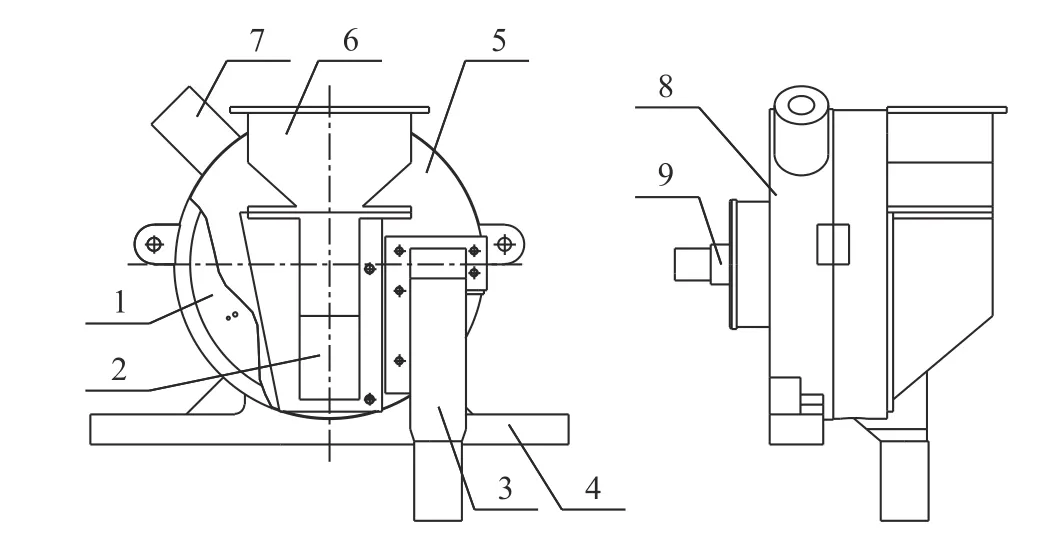
图 3 排种器结构示意图Fig. 3 Structural diagram of seed metering device
排种盘是实现精量播种的核心部件,研究表明,气吸式排种器排种盘直径一般为140~260 mm[21]。根据辣椒播种要求及负压腔体的密闭要求,选择排种盘直径140 mm。对排种器结构及工作过程分析,使吸种孔负压保持在中间位置,所以设计吸种孔在排种盘上环形排列的直径取115 mm。
2.3 吸种孔设计
对南方广泛种植的辣椒品种的种子进行机械物理特性测定,结果表明,辣椒种子的形状为椭圆碟片型,种子外形尺寸(长×宽×厚)平均为3.70 mm×3.20 mm×0.75 mm,种子颗粒密度为630 kg/m3,千粒质量为5.53 g,与有机玻璃的滑动摩擦角为27.3°、休止角为39°。吸种孔的形状和尺寸与辣椒种子的形状尺寸相适应,设计原则是保证1 个吸种孔仅有1 粒种子,根据辣椒种子大小确定吸种孔直径(d)。

式中,a 为系数,一般取0.64~0.66;b 为种子平均宽度;则d 为2.05~2.11。辣椒种子为椭圆碟片状,因此取2 mm 作为吸种孔的直径。
吸种孔数与播种速度、播种频率及穴距有较大关系,对排种性能有显著影响。为提高播种机的作业效率,可提高排种盘的转速,但排种盘转速过高,充种时间过短,充种室内的种子来不及吸到排种盘上,会造成漏播;搅种时转速过快容易损伤种子,影响出苗率。相关研究[22]表明排种孔稳定吸种线速度不宜超过0.35 m/s(排种盘转速最高为58.2 r/min),拖拉机田间作业速度为0.5~1.0 m/s,辣椒的种植农艺要求,穴距为150~250 mm,南方常用穴距为200 mm[23-24]。根据公式(2)确定吸种孔的孔数(N)。式中,v 为田间作业速度,m/s,此处取1 m/s;l 为穴距;n 为排种盘转速,r/min。
机器作业速度一定,穴距保持不变的情况下,随孔数的增多,排种盘转速降低,充种时间较长,排种性能逐渐提高;同样随着孔数的增多,两吸种孔之间距离逐渐变小,当孔数增加到一定值时,两吸种孔吸种会相互干扰,使得种子在吸种孔上排列混乱,造成排种质量降低。在不影响吸种孔的吸种、清种和落种的情况下,取吸种孔数量为6。
2.4 排种过程分析
2.4.1 吸种动力学分析 为保证种子被稳定吸附在吸种、携种弧段上,且随排种盘转动,相对于吸种孔不发生滚动和滑动。根据设计的排种盘的大小,对充种区的吸种弧段和携种弧段所吸附的种子进行受力分析,具体如图4 所示。
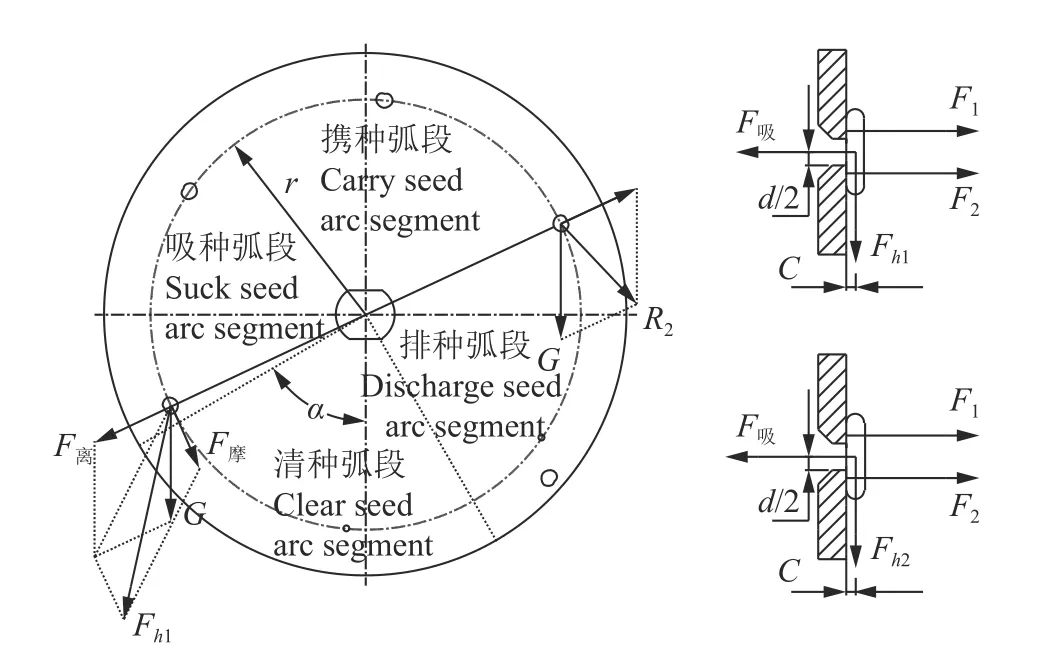
图 4 种子在充种区和携种区的受力分析Fig. 4 Force analysis of seeds in seed filling zone and seed carrying areas
被稳定吸附在吸种弧段上的种子需要满足下列受力平衡:


由吸力与真空度的关系,吸种弧段所需的真空度(Hc)需满足:

式中,S 为吸孔面积,mm2;Hc为吸室临界真空度,Pa。
因充种区存在种间摩擦,吸种弧段所需吸力大于其他弧段,所以此处不再对携种区的受力进行分析。在吸种区当Fh1达到最大值时,式(4)可简化为:

式中,g 为重力加速度,m/s2;v 为排种盘吸孔中心处的线速度,m/s;r 为排种盘吸孔处的转动半径,mm;λ 为种子的摩擦阻力综合系数;K1为吸种可靠性系数;K2为外界条件影响系数;K3为种子含水率影响系数。参照相关文献[23],本文取λ=36.15,K1=2,K2=1.8,K3=1.2,v=0.36 m/s。计算得临界真空度Hc=139 Pa,排种器台架试验最佳真空度值是150 Pa,计算值和实际值接近。
2.4.2 携种状态分析 辣椒种子为椭圆碟片形,外形尺寸不规则,而排种盘上种子的吸附状态不同,对吸孔的密封也不完全一样,导致种子的吸种粒数不同。种子以不同的姿态进入吸种孔,当种子以直立姿态进入吸种孔时,吸种孔还有间隙,且此时的吸力较强,吸种孔吸附2 或3 粒种子的可能性增大。前期试验发现,在保证空穴发生率低于2%的气压作用下,辣椒种子能在携种区形成稳定的吸附状态,如图5 所示。但由于辣椒种子外形尺寸的特殊性,清种装置会造成伤种,且不增加清种装置也能满足1~3 粒/穴播种量的农艺要求,无需增设额外的清种装置。
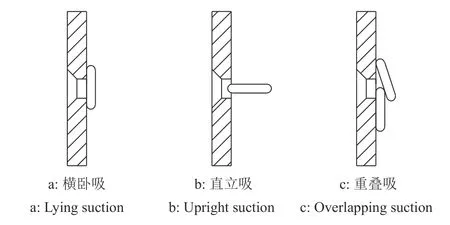
图 5 种子的吸附状态Fig. 5 Adsorption states of seeds
2.5 穴距调整系统
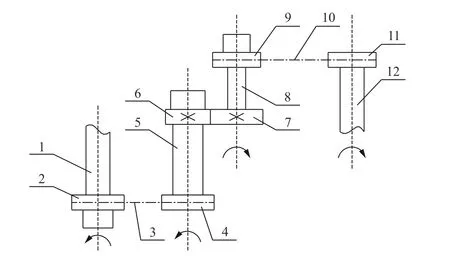
图 6 穴距调整系统结构示意图Fig. 6 Structural diagram of hole distance adjusting system
2.5.1 穴距调整系统结构 为提高播种机具的实用性和通用性,播种穴距必须具有一定的调节范围。播种单体的穴距调整系统如图6 所示,穴距调整系统由二级链传动和一级变速齿轮组传动组成;拖拉机挂接机具进行生产作业时,地轮同步转动由地轮轴输入,经第一级链传动将动力输送到变速器输入轴,由齿轮组成的变速齿轮组将不同传动比的动力输出给第二级链传动,最终带动末端的排种器轴转动,实现播排种盘的转动与车速的同步匹配,同时可通过改变变速传动齿轮组的啮合齿轮实现播种穴距的调节。2.5.2 穴距调整系统的工作原理 气吸式辣椒精量穴直播机穴距调节主要通过调节传动系统中变速器的档位,改变动力输入与输出之间的传动比来实现,不同传动比对应不同的穴距。辣椒播种穴距要求150~250 mm,南方常用穴距为200 mm,本文以变速器三档为常用穴距开展穴距调整系统设计。本文地轮直径(D)为250 mm,滑移率(δ)取5%,排种盘转动1 圈播种6 穴,则理论穴距(l)满足公式(6)。整机总传动比的计算见公式(7),本机第一级链传动比取值为1,即链轮I 齿数(Z1)=链轮II 齿数(Z2)=25[24-25]。齿轮I 齿数(Z3)为18,变速器三档对应的齿轮II 的齿数(Z4)为21,链轮Ⅳ为排种轴上链轮,取齿数(Z6)为21。由公式(6)和(7),得链轮III 的齿数(Z5)计算公式(8),通过计算Z5=17。
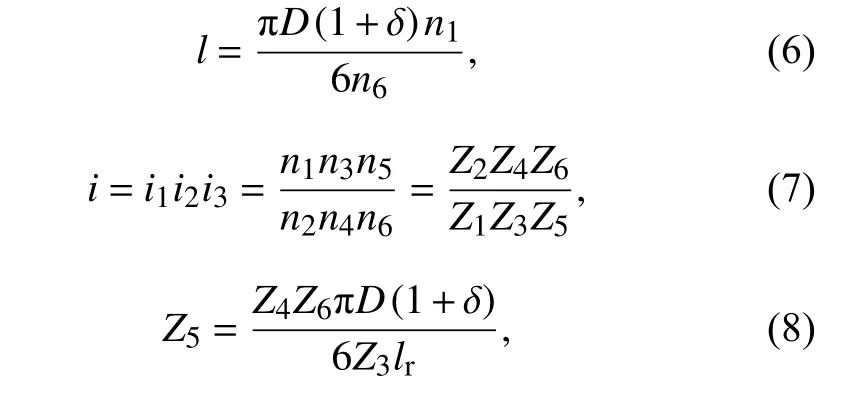
式中,i 为本机总传动比;i1为第一级链传动比,取值为1;i2为齿轮传动比;i3为第二级链传动比;n1为地轮轴转速,n2、n3为变速箱输入轴转速,n4、n5为变速箱输出轴转速,n6为排种轴转速,r/min。
穴距与齿轮Ⅱ的齿数Z4一一对应,则每一个档位对应的齿数带入公式(9)可计算对应的穴距(l),计算结果如表1 所示。

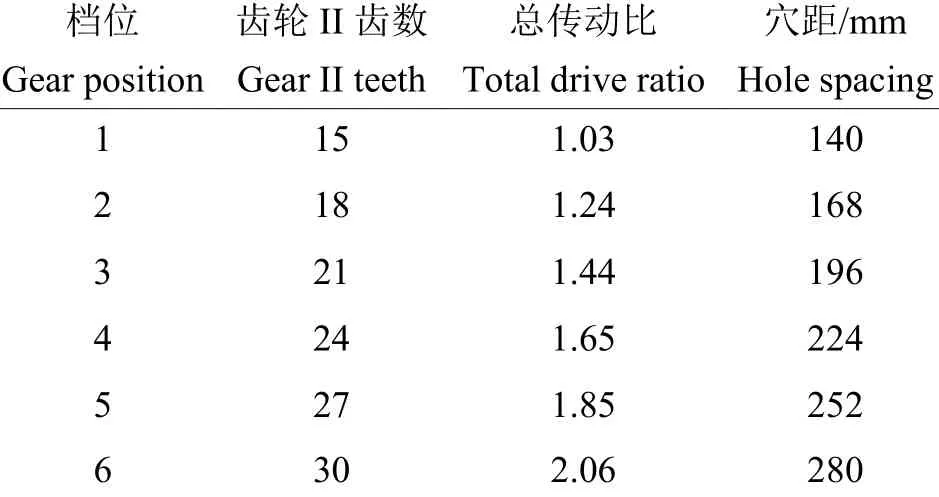
表 1 变速箱各档位与穴距对应表Table 1 Different gear position in the gear box and the corresponding hole distance
2.6 风机选型
本样机选用离心式风机,前期试验表明,整机所需风量为2.2×10-2m3/s,总风压为3.2 kPa,可满足本机组2 个播种单体的正常工作。根据文献[26],可以计算所选风机的有效功率(Pe)。

式中,Q 为风量,m3/s;p 为风压,kPa。
根据风量和风压,可计算得到风机的有效功率Pe=7.2×10-2kW。
根据参考文献[27],取内效率ηi=0.7,机械效率ηm=0.92,轴功率(Ps)为:

使风压满足播种机的要求[28],将所用风机的功率储备系数K 定为1.1。
因此,所需的风机功率(Ped)为:

将数据带入公式(12),求得Ped为0.12 kW。
所选风机功率不能低于0.12 kW,由于管路的长度和气室的空间大小对吸孔处的负压和流速有影响,所以风机所需的功率应该比理论计算的功率大,且需要预留足够的功率作为后备功率,并且从经济上考虑,风机直接选用了黑龙江省双福机械有限公司生产的离心式电动风机。该风机的功率为0.2 kW,完全满足该播种机的风压要求。风机安装在主机架的安装板上,单独由蓄电池供电,风机与播种机之间用硬脂塑料管连接。
3 田间播种试验与结果
3.1 试验材料
试验在华南农业大学增城教学试验基地(N 23°14′35.78″,E113°38′17.00″,海拔20 m)展开,试验田地势平坦,土壤类型为壤土,土壤含水率为18%~25%,土壤紧实度为2 kg/cm2。本次试验前茬作物为玉米,试验前采用旋耕机对田块土壤进行耕整,使其细碎平整并起高20 cm、宽70 cm 的地垄。试验材料为‘辣研102’,其物理特性如下:千粒质量5.53 g,容重759.2 g/L,颗粒密度630 kg/m3,含水率为11.2%,种子外形尺寸(长×宽×厚)平均为3.70 mm ×3.20 mm×0.75 mm。试验用拖拉机为常发金冠CFD554A 轮式拖拉机,作业速度为3.6 km/h,图7为播种机及田间试验图片。
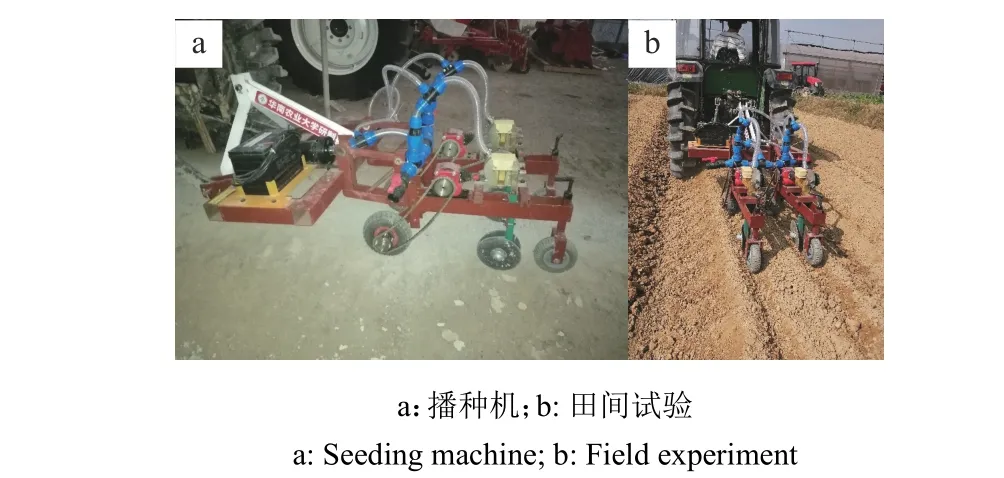
图 7 田间播种试验Fig. 7 Field sowing test
3.2 指标及测定方法
为考核气吸式辣椒精量穴直播机整机结构设计是否合理,以及性能指标是否达到田间实际生产要求。根据参考文献[29-30]的方法,对气吸式辣椒精量穴直播机田间生产进行测试,测试内容主要包括地轮滑移率、穴距及其变异系数和播种深度合格率等。主要检测设备包括卷尺、铁刮板、电子秤、计算器、秒表、标杆、塑料袋、土壤硬度计和铁锹等。
根据地轮半径计算得到地轮行走20 圈的理论距离;标记地轮,测量机具在拖拉机的牵引下,地轮转动20 圈前进的实际距离,重复5 次试验取平均值。地轮滑移率(δ)计算公式如下:

式中,r 为地轮半径,mm;n 取20 圈;S 为地轮走过的实际距离,m。
试验区总长度为100 m,测区为播种机单次作业开始后10 m 和结束前10 m 的区间。设定3 个穴距进行试验,每个穴距重复3 次,每次连续测250组穴距和穴粒数,记录数据并统计结果。根据标准和辣椒种植农艺要求,设定穴距和穴粒数2 个考核指标对作业质量进行评估,计算穴距合格指数、重播指数、漏播指数、标准差(穴距偏移指数)和变异系数,根据穴距合格指数计算式计算穴距合格指数;按照播种量1~3 粒/穴为合格,空穴和每穴粒数大于4 分别为漏播和重播,并计算出对应的概率,作为评价指标。

式中,A 为考核指数,n1为播种穴距满足要求的数量,即考核数;N'为考核区间数。
播种深度与地平面有关,应以镇压后的地面为准。播种深度的测定取5 行,每行测定10 点,在测点上垂直切开土层使种子完全露出,测量播种深度并记录数据,播种深度合格率是指覆土深度 ± 10 mm的点占总测定点的百分数,按公式(15)计算测区播种深度合格率(Q)。

式中,q 为播种深度合格点数;q总为测定总点数。
3.3 结果与分析
3.3.1 地轮滑移率 地轮为没有动力的第5 轮,其因机具行走与土地产生的摩擦而同步转动,能较好体现机具前进的速度,其产生的动力经过动力传输系统直接作用于吸种盘的旋转。由于地轮存在滑移现象,会导致地轮速度与机具前进速度不匹配,从而影响吸种盘转速,直接体现在播种穴距上。地轮滑移率越小,播种穴距越接近理论穴距;地轮滑移率越大,实际播种穴距会同步增大。采用定圈测距的方式测得地轮转动20 圈播种机的实际前进距离统计结果,并对试验结果进行分析得出实际前进距离平均为16.71 m,理论前进距离为15.71 m,计算得出地轮的滑移率为6.37%,标准差为0.11,变异系数为2.02%。穴距调整系统设计时已考虑5%的滑移率影响,所以本机的设计可靠且符合实际生产需求。3.3.2 穴粒数及穴距 统计选取的3 个穴距及穴粒数试验结果如表2 和表3 所示。由表2 和表3 结果可知,在开展播种作业的时候,在不同的播种穴距下,播种机穴距合格率均大于89%,重播率均小于4.85%,漏播率均小于11%,合格穴距变异系数均小于23.77%,穴粒数合格率大于89.86%,重播率小于11%,漏播率小于0.53%。在行进速度不变的情况下,随着播种穴距的增大,排种器转速减慢,穴距合格指数增大,重播指数几乎不变,漏播指数减小,合格穴距变异系数减小。穴距和穴粒数两方面的考查参数均符合相关标准的规定,作业质量达到辣椒直播的要求。
3.3.3 播种深度合格率 辣椒最佳播种深度为20 mm,处理各行播种深度值后得到的2 项指标值如表4所示。播种深度主要影响种子的出苗率,播种深度的一致性主要影响出苗时间的一致性。由表4 可知,播种深度变化不大,平均播种深度合格率为86%,高于相关标准规定的不小于80%的指标。覆土镇压装置的覆土量满足生产需求,对种子萌发和出苗时间没有较大影响,达到生产要求。
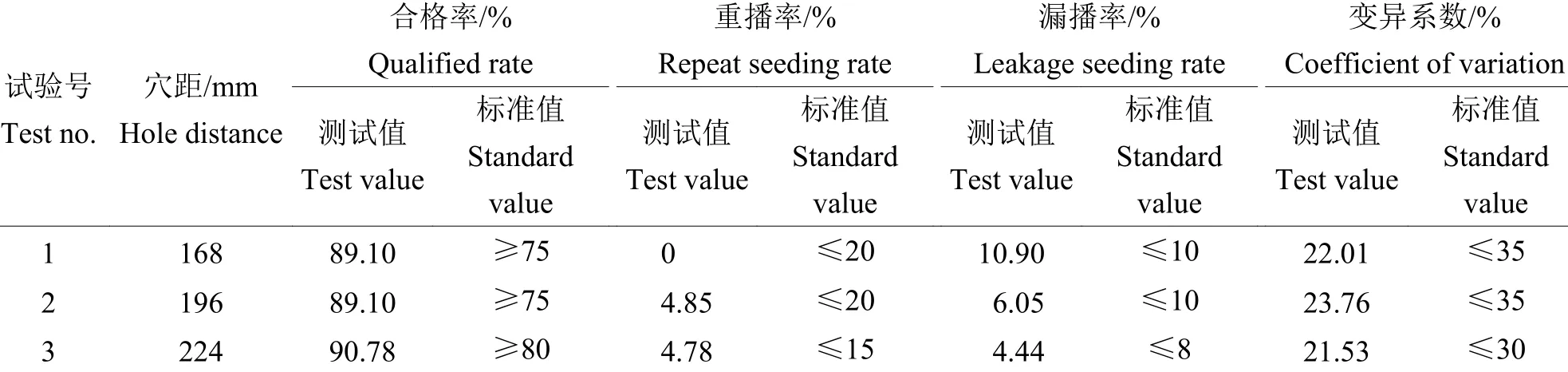
表 2 穴距及其变异系数试验结果Table 2 Test results of hole distance and its coefficient of variation

表 3 穴粒数试验结果Table 3 Test result of seed number in hole

表 4 播种深度试验结果Table 4 Test result of seeding depth
4 结论
1)研制了一种气吸式辣椒精量穴直播机,提出用于辣椒穴直播的气吸精量排种器,整机可一次完成开沟、播种、覆土和镇压等工序。该机器播种量、穴距、播种深度等播种质量指标皆达到相关标准规定,满足农业生产要求。
2)田间试验结果表明,气吸式辣椒精量穴直播机的播种量为1~3 粒/穴,穴粒数平均漏播率为0.18%,平均合格率为91.16%,平均重播率为8.66%。不同穴距试验的播种穴距合格指数均大于89%,重播指数均小于4.85%,漏播指数均小于11%,合格穴距变异系数均小于23.77%,播深合格率为86%。各项指标值均满足标准[30]要求。
由于机具覆土依靠种沟开沟器回土,土壤含水率或黏度不同会造成回土量不稳定,影响播种深度,有待进一步研究。
猜你喜欢
农业工程学报(2022年6期)2022-06-27
农业工程学报(2022年6期)2022-06-27
农业技术与装备(2021年3期)2021-12-01
农机科技推广(2021年3期)2021-08-02
科学与生活(2021年27期)2021-01-11
今日农业(2020年22期)2020-12-14
农业科技与信息(2020年9期)2020-07-03
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
上海农业科技(2019年1期)2019-02-22
