
耕地质量低空遥感-地面传感双重采集系统研究
2020-06-02 08:53张飞扬胡月明陈联诚王广兴
华南农业大学学报 2020年3期
张飞扬,胡月明,陈联诚,王广兴
(1 华南农业大学 资源环境学院,广东 广州 510642; 2 广东省土地利用与整治重点实验室/广东省土地信息工程技术研究中心/自然资源部建设用地再开发重点实验室,广东 广州 510642; 3 南伊利诺伊大学,伊利诺伊州 卡本代尔 62901)
耕地质量监测的监测指标数量和种类较多[1],常规的现场调查与实验室化验分析方法虽然能够获得绝大部分耕地质量监测指标数据,但现场调查的主观影响大,实验室化验费时费力,调查数据无法展现耕地质量指标的空间和时间变化。如果能够获得监测区域的地面长期监测数据和低空遥感数据,就可以为耕地质量指标的监测提供新的监测和分析方法[2]。现有的无线传感器网络和无人机可以分别提供地面长期监测数据和低空遥感数据。
无线传感器网络可以进行地面长期监测。作为物联网的重要技术之一,无线传感器网络一直是国内外的研究热点,并已广泛应用于农业生产[3-6]、环境监测[7-9]、地质检测[10-11]、文化遗产保护[12-13]等领域。传统的无线传感器网络受到丘陵、农作物等地貌地物的影响,容易出现无法通信、丢包率大或者能量消耗不均匀的问题[14-16]。在无人机上搭载汇聚节点形成立体无线传感器网络,可以利用无人机在低空、超低空飞行不受地形和环境影响的特点实现汇聚节点的移动,防止节点之间被农作物遮挡导致数据无法传输[17-21]。
无人机低空遥感可以进行区域低空遥感监测。无人机采集的数据具有高空间分辨率和高空间精度的特点,是近年来热门的遥感监测技术,可以用于精准农业航空[22-26]、土地利用监管[27-28]、地形测绘[29-32]等领域。与卫星遥感相比,无人机低空遥感可以采集到更高空间分辨率的图像或光谱数据和更优质的遥感数据,并且采样成本低[33-35]。
但是,现有的无人机-无线传感器网络(UAVWSN) 系统无法直接成为一套双重采集系统。UAV-WSN 系统中无人机只是作为移动汇聚节点获取地面节点数据,无法获取低空遥感数据;或者无人机只是作为采样设备采集低空遥感数据,无法保证能够完整获取地面节点数据。现有的UAVWSN 系统需要以不同的方式和不同的航线采集低空遥感数据和地面长期监测数据[36-43]。直接将2 种采集合并,无人机采集的图像数据就无法拼接为低空遥感数据,或者无人机无法完全汇聚所有地面节点长期监测数据。
本研究设计了一种用于耕地质量监测的低空遥感-地面传感监测双重采集方法及系统,1 次采样飞行同时获取完整的地面节点长期监测数据和低空遥感图像数据2 种监测数据。其中的关键技术在于设计1 套全新的双重采集工作流程,并且对原有的2 套技术方案关键步骤和算法进行有效的融合与更新,使之成为适用于本发明的双重采集步骤与算法。通过立体无线传感器网络和无人机低空遥感的集成与融合,能够减少现场采样所需的总工作时长、降低采样工作的复杂程度、提升耕地质量监测的效率。
1 双重采集系统设计
1.1 双重采集思路
现有立体无线传感器网络监测和低空遥感监测系统的主要思路分别如图1 所示。图1a 显示立体无线传感器网络根据地面节点分簇后的头节点位置确定无人机航线,图1b 显示低空遥感监测系统根据机载相机或光谱成像仪的参数确定无人机航线。

图 1 立体无线传感器网络(a)和低空遥感监测系统(b)技术方案Fig. 1 Solutions of stereo wireless sensor network (a) and low altitude remote sensing monitoring system (b)

图 2 直接合并2 套系统产生的问题Fig. 2 Problem of integrating two systems into one
如果将立体无线传感器网络和低空遥感监测系统直接合并为同一套系统,由于这2 套系统的数据采集原理与航线规划方法不同,依旧无法实现1 次飞行任务采集2 种数据。如果以立体无线传感器网络的技术方案为主同时采集低空遥感图像,所采集的图像数据不仅分布不均匀,而且无法拼接为整个区域完整的低空遥感数据,如图2a 所示。特别是应用了分簇路由协议的立体无线传感器网络,由于是动态组网,每次分簇组网的头节点不同,航线也会不同,所采集到的地面图像数据的位置也就完全不同。如果以低空遥感监测系统的技术方案为主同时采集地面节点数据,由于航线规划过程不考虑地面节点位置,这就很可能会出现无人机不经过地面节点分簇后的头节点的有效通信范围,导致地面数据无法发送至无人机;或者无人机经过地面节点分簇后的头节点有效通信范围的航线长度太短,头节点没有足够的通信时间将数据全部传输至无人机,如图2b 所示。
由于没有可以同时满足立体无线传感器网络系统和低空遥感监测系统的航线规划算法,本研究创新一种双重采样技术方案,主体思路如图3 所示:根据机载相机或光谱成像仪的参数确定无人机航线,通过无人机航线数据进行地面节点分簇和数据传输,再通过地面节点来提升无人机低空遥感数据精度。
1.2 双重采集系统硬件设计

图 3 低空遥感-地面传感监测双重采集系统技术方案Fig. 3 Solution of low altitude remote sensing-ground sensing double collection system
双重采集系统硬件架构分为2 部分:地面节点和空中无人机(图4)。地面节点与常规无线传感器网络的传感器节点相似,主要包括控制模块、采集模块、通信模块、存储模块、电源模块、太阳能板。采集模块根据监测需求搭配不同的传感器,例如用于耕地质量监测,分别可以选择搭配三深度土壤含水量传感器、土壤pH 及EC 传感器、气象站、叶面积指数传感器等。通信模块根据耕地大小和分布进行调整,常规情况下搭配各类低功耗ZigBee 模块,减少通信方面的能耗以增加地面网络整体生存时间;耕地地块小、破碎化程度高的情况下搭配WiFi 模块,提升数据传输速率,尽可能多得采集地面情况;耕地面积广、与固定翼无人机配合的情况下搭配LPWA 模块,提升通信距离以实现与飞行高度较高的固定翼无人机进行数据传输。
空中无人机平台是一台无人机搭载2 种机载功能模块,包括低空遥感数据采集和地面传感数据汇聚。根据监测需求低空遥感数据采集可以选择高清相机、热成像相机、多光谱相机、高光谱成像仪等,并且利用无人机自带或额外加装的定位定姿系统(Position and orientation system,POS)在记录图像、多光谱相片等数据的同时给每张相片附加对应的经纬度、高度、三轴翻滚角和光照强度。地面传感数据汇集由控制模块、通信模块、存储模块和电源模块组成。通信模块选取与地面传感器节点所选取的通信模块类型相同的模块,如果所选类型为ZigBee 或者LPWA,需要额外附加WiFi 模块用于与移动实验室通信。电源模块根据无人机进行调整,如果无人机提供电源接口,电源模块使用调压模块连接无人机;如果无人机没有电源接口,电源模块为高容量电池。

图 4 硬件架构示意图Fig. 4 Schematic diagram of hardware
2 低空遥感-地面传感双重采集方法
2.1 双重采集设计
将立体无线传感器网络和无人机低空遥感这2 套监测系统进行集成,需要解决2 个问题:如何让地面节点集群的数据传输适应无人机的飞行航线,如何利用地面节点集群提升低空遥感效果。

图 5 双重采集技术方案流程图Fig. 5 Chart flow of double collection solution
整个系统的工作流程如图5 所示。工作人员部署地面节点时,测定每个地面节点的太阳能板的经纬度和海拔高度,将太阳能板作为低空遥感图像拼接过程所需的地面控制点(Ground control point,GCP);每次采样飞行前,规划好的无人机飞行航线会同时传入无人机飞行控制器和无人机上的汇聚节点;在无人机采集低空遥感图像的过程中,汇聚节点会不断向地面发送组网信号,地面节点集群中任意一个节点接收到组网信号后与汇聚节点通信并接收航线数据,然后使用定向扩散协议将航线数据传输给所有地面节点;地面节点集群使用基于航线的LEACH 路由协议选取头节点并将数据发送至头节点,由头节点将数据传输至汇聚节点;无人机的低空遥感图像数据和地面节点传感数据上传至远程服务器的P h o t o S c a n 图像拼接软件,在PhotoScan 拼接图像的过程中人工识别每个作为GCP 的地面节点太阳能板并录入经纬度以提升几何精度,PhotoScan 继续进行拼接任务生成鸟瞰图、数字高程模型(Digital elevation model,DEM)等低空遥感产品[44]。
让地面节点集群的数据传输适应无人机的飞行航线,关键在于将航线作为参数进行地面节点的组网。通过将航线数据传遍所有地面节点并基于航线数据进行分簇组网,可以保证每个簇都将数据顺利传输给无人机上的汇聚节点,同时兼顾地面节点集群的能量均衡。
利用地面节点集群提升低空遥感效果是指将地面节点作为地面控制点。对于低空遥感监测系统,如果人工部署GCP,虽然能够将水平方向的误差降低至0.51 cm[45],但是需要工作人员走遍整个监测区域选取地物或放置靶标作为GCP 并测量经纬度,完成测量后再走遍整个区域回收靶标,花费的时间和人力远远高于无人机飞行航拍的过程;如果不部署GCP,虽然工作人员仅需站在无人机起飞点观察和等待无人机完成飞行航拍,但是水平方向的误差为1~2 m。双重采集系统使用坐标点已知、位置固定、形状规整的地面节点集群的太阳能板作为地面控制点,工作人员在采样过程中不需要走遍整个区域部署地面控制点,而是在拼接图像时人工识别每个地面节点的太阳能板并录入该地面节点的经纬度。因此双重采集系统可以在保证低空遥感数据几何精度的同时免去每次飞行前人工部署地面控制点的人力和时间成本[45-46]。
2.2 基于航线的LEACH 算法
为了让双重采集系统的地面节点集群组网及数据传输适应无人机的飞行航线,本研究以经典的LEACH 算法为基础,设计了基于航线的LEACH 算法。经典LEACH 算法纯以概率均衡地面节点集群能量消耗,直接用于双重采集系统有可能出现头节点与无人机通信时间过短甚至无法与无人机直接通信的情况。本研究设计的算法中,无人机经过有效通信区域的航向长度越长的节点被选为头节点的几率越大,而无人机不经过有效通信区域的节点被选中的几率为0。
如果有n 个地面节点,每个节点获取到无人机的航线数据后,会根据自身的经纬度计算无人机飞过能够进行数据传输的有效通信区域的航线长度ln,然后计算Tn。接着每个节点随机生成1 个(0,1)之间的数,如果该节点生成的数小于Tn则为头节点,Tn计算公式如下:

式中,p 是网络中所需头节点数目与总的地面节点数目的比值,Pn是p 经过有效通信距离作为权重进行加权后的值,Tn是节点当选为头节点的阈值,ln是无人机飞过节点n 的有效通信范围的航线长度,d 是最大直线通信距离,h 是无人机飞行高度,r 是当前选举轮数,G 是在剩余1/p 轮中非头节点的节点集。
选出头节点后,头节点会通过定向扩散协议向整个地面节点集群发送当选信息和自身坐标。如果地面节点集群内本轮出现多个头节点,则其余节点根据距离选择最接近自己的头节点进行组网。每个节点会将自身信息和路由沿着从头节点定向扩散路径的反方向发送给头节点。头节点根据反向回馈的节点信息为每个成员节点分配相应的TDMA 时隙表,错开各个节点发送数据的时间,避免信息拥堵。头节点完成收集所有成员节点的数据后,当无人机飞入头节点有效通信范围内时,头节点将数据发送至无人机的汇聚节点。
本步骤是实现地面节点配合无人机航线,而不是常规的无人机航线配合地面节点的关键。通过将航线数据融入LEACH 算法,可以在均衡地面节点集群能量消耗的同时提升数据传输效率。
3 仿真试验与结果
3.1 仿真设置
本研究开发了一套低空遥感-地面传感双重采集仿真器,用于仿真双重采集系统双重采集任务的过程数据(图6)。现有的仿真器大多只是针对无人机飞行或者常规无线传感器网络数据传输,不能同时仿真无人机飞行、低空遥感数据采集以及针对立体无线传感器网络数据传输的软件。因此本研究针对低空遥感-地面传感双重采集的特性,使用C#编写了双重采集仿真器进行性能仿真试验。
在实际应用中,地面节点集群中各个节点的分布受耕地形状、田间设施等因素的影响,基于航线的LEACH 算法按不同概率选取头节点,两者都有不确定性。本次模拟试验使用最简单的随机布点法模拟地面节点的分布,使用蒙特卡洛法进行大量模拟,通过上万次的随机布点获取不同情景下采样的总飞行时间。
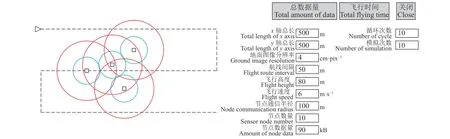
图 6 低空遥感-地面传感双重采集仿真器Fig. 6 Emulator of low altitude remote sensing-ground sensing double collection
本次仿真试验设定的监测区域为500 m×500 m的正方形区域,无人机使用大疆精灵3 Advanced,地面节点的通信模块使用CC2530。CC2530 最大通信距离为100 m,通信频率2.4 GHz,平均传输速率3 kB/s。大疆精灵3 Advanced 最大飞行速度为16 m/s,最大飞行时间23 min,相机为1/2.3 CMOS传感器,镜头FOV94° 20 mm,相片分辨率4 000×3 000。规划航线时,旁向重叠率设定为30%,航向重叠率设定为60%,飞行速度设定为10 m/s。
3.2 结果
仿真试验中分别调整无人机采集图像的地面分辨率和监测区域内地面节点数量,即无人机飞行高度和地面节点密度,以此来对比本研究的低空遥感-地面传感双重采集系统与UAV-WSN 系统分别采集地面节点数据和低空遥感数据的方法在总采样飞行时间上的不同。
图7 为地面图像分辨率变化时的时间曲线。随着地面图像分辨率增加,无人机飞行高度增加,航线密度减小,进行低空遥感图像采集的飞行路程减少,总飞行时间整体呈下降趋势。由于双重采集系统只需1 次飞行就能采集2 种数据,因此总飞行时间更短,比UAV-WSN 系统快约165 s。

图 7 地面图像分辨率-总飞行时间曲线Fig. 7 Curve of ground image resolution - total flying time
图8 为地面节点数量变化时的时间曲线。无人机的飞行高度与航拍所得地面图像分辨率成正比,当地面图像分辨率为3 cm/pix 的时候无人机飞行高度为69 m,基本可以保证无人机在耕地上空自动飞行时不会撞上高压线塔等建筑。监测区域计划部署1 个气象站采集气象数据、2~6 个三深度土壤含水量节点采集耕地内含水量空间分布、1~2 个图像节点和2~5 个叶面积节点采集作物长势,区域内节点从6 个逐渐增加到14 个。双重采集系统的航线完全按照航空摄影测量的原理进行规划,总飞行时间保持在450 s 不变。UAV-WSN 系统总飞行时间随着地面节点密度增加而上升,从579 s 上升至644 s。

图 8 地面节点数量-总飞行时间曲线Fig. 8 Curve of ground sensor node number-total flying time
4 通信试验与结果
本研究在增城实验基地的稻田内进行了通信试验,测试空中汇聚节点接收稻田地面节点数据的丢包率。地面节点部署在接近稻田边界的地方,无人机搭载汇聚节点悬停在不同高度和水平距离的采样点接收数据。总共设置17 个采样点,垂直方向以10 m 为起点,以20 m 为步长逐渐上升至70 m;水平方向以18 m 为起点,以约15 m为步长逐渐移动至60 m。最终设置1 个水平距离60 m、垂直高度90 m 的最远点,此时地面节点和汇聚节点的直线距离为108.17 m。
从表1 的试验结果可得,不同飞行高度的最大通信距离不小于100 m。17 个采样点的直线距离为20.59 ~108.17 m,总平均丢包率为1.38%。其中只有4 个采样点出现少量丢包,其余13 个采样点接收到所有数据包。丢包率最大的是水平距离33 m、垂直高度70 m、直线距离77.39 m 的采样点,丢包率9.09%,平均信号强度为-75.75 dBm。其余3 个有丢包的采样点丢包率小于5%,平均信号强度为-75.75 ~-50.45 dBm。直线距离最远的采样点没有丢包,平均信号强度为-69.35 dBm。

表 1 通信试验数据Table 1 Test data of communication experiment
通信试验验证了无人机搭载汇聚节点接收田间地面节点数据的可行性和通信质量。无人机飞行时只要与地面节点的直线距离不大于100 m,基本能够保证良好的通信质量。本研究设计的低空遥感-地面传感双重采集系统的通信验证可行。
5 结论
本研究设计了一种低空遥感-地面传感双重采集方法及系统,1 次采样飞行就能同时获取完整的地面节点长期监测数据和低空遥感图像数据。将原本独立的立体无线传感器网络和无人机低空遥感监测系统融合成低空遥感-地面传感双重采集系统的关键在于对原有的2 套技术方案关键步骤和算法进行有效的融合与更新,设计一套全新的双重采集工作流程,以及基于航线的LEACH 算法。仿真分析表明双重采集系统与2 套系统独立运行相比,总飞行时间更短,更适用于地面节点密度大、监测范围大的情景。立体无线传感器网络和无人机低空遥感的集成与融合,不仅缩短了采样飞行所需的飞行时间和次数,也减少了无人机的电池消耗量、降低了无人机航线规划的难度、减少了工作人员的工作量、提升了现场采样工作的效率。
本研究从集成的角度出发,探索了将立体无线传感器网络与低空遥感监测系统有效融合的架构与方法。集成后的低空遥感-地面传感系统具有与独立无线传感器网络和立体无线传感器网络不同的特性,因此在地面和空中的立体无线传感器网络的数据传输和能量优化、无人机飞行速度和航线规划等方面还能继续进行研究,进一步提升低空遥感-地面传感系统在工作效率、能量消耗等方面的性能。
猜你喜欢
江苏安全生产(2022年9期)2022-11-02
军民两用技术与产品(2021年10期)2021-03-16
小哥白尼(神奇星球)(2021年12期)2021-03-08
中国外汇(2019年7期)2019-07-13
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
北京航空航天大学学报(2017年9期)2017-12-18
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
南方文学(2016年3期)2016-06-12
