
船桨舵一体化耦合下的双桨船数值自航模拟
2020-05-30 03:21孙聪宋科委王超郭春雨郭航
应用科技 2020年2期
孙聪,宋科委,王超,郭春雨,郭航
哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001
随着计算机硬件设施的发展,计算流体力学(computational fluid dynamics,CFD)在船舶与海洋结构物的性能预报中得到了广泛的应用。传统的船模拖曳水池试验,往往只能对阻力、倾角等单一的水动力性能进行测试,其对于船舶精细流场很难做到全方位的捕捉。而基于CFD 的数值研究能够在节约时间、财力的同时,获得相对准确的力学及流场信息。目前,CFD 技术不仅应用在传统的阻力试验模拟中[1],在船舶操纵性[2]、耐波性[3]以及自航性能[4]等诸多领域也得到了相应的开展。
丁科等[5]通过RANS 和VOF 方法,对船+桨自航状态下的螺旋桨激振力进行了数值预报,未考虑舵的影响。Chang 等[6]基于CFD 软件STARCCM+对安装扇形节能导管的船舶航行性能进行研究,计算未计及舵的干扰。Duman 等[7]基于RANS方法对DTMB5512 船模的船桨干扰进行了研究,但文中的螺旋桨用虚拟盘模型替代,未考虑真实的螺旋桨形状。同样,Jasak 等[8-9]选用虚拟盘模型进行了实尺度船舶自航计算,在与实海域测量结果对比的基础上,阐述了网格的验证及确认过程。Dhinesh 等[10]对某双桨船进行了试验及数值研究,探讨了自航数值模拟的流程,并分析了螺旋桨对船舶尾流场的影响。李亮等[11]、朱芳艳[12]以KCS 船和KP505 桨为研究对象,研究了单桨集装箱船的航行性能。
目前,学者们对于船模自航数值模拟进行了较多的研究分析,但大多数研究未考虑舵对船舶航行性能的影响,且相当一部分研究是基于虚拟盘模型进行的,研究船型也多为单桨船舶。因此,本文基于真实螺旋桨模型,计及舵的影响,对大型水面舰艇的DTMB5415 模型进行自航数值研究,分析船体、螺旋桨、舵之间的相互干扰及流场变化,为双桨推进船舶航行性能的研究提供参考。
1 数值计算方法
1.1 湍流模型及离散格式
本文所有的研究工作(船模阻力计算、螺旋桨敞水计算、船-桨-舵耦合自航计算)均是基于STAR-CCM+进行的。采用SSTk-w湍流模型对其进行求解并封闭方程组。控制方程采用基于压力的耦合求解,其中对流项采用二阶迎风格式进行空间离散,耗散项采用二阶中心差分格式进行离散,利用VOF 模型进行自由液面的捕捉,基于滑移网格实现螺旋桨的旋转。
1.2 几何模型
本文所使用的的船舶模型为美国驱逐舰DDG-51 母型船的缩尺模型,该船具有球鼻艏以及方形尾特征,是典型的的中高速船舶水面舰艇,被国际拖曳水池会议(ITTC)推荐作为船舶水动力性能研究的三大基准模型之一。由于该船原配桨公开的试验资料极少,本文计算所使用的的桨为DTMB5415-M 船模操纵性试验[13]中所用的P4508库存桨。图1 为装配完成的船-桨-舵一体化计算模型。表1 给出了文中所使用的模型的主要参数。

图1 自航计算船舶模型

表1 模型主尺度
1.3 计算域及网格划分
船模自航数值计算共包含阻力计算、螺旋桨敞水计算以及自航模拟3 部分。图2(a)为螺旋桨敞水计算时的计算域,其分为旋转域和背景域2 部分,中间通过Interface 交界面实现物质交换。背景域的形状为直径等于8D的圆柱,螺旋桨距离进流口和出口的长度分别为3D和8D。阻力和自航计算时的计算域如图2(b)所示,自航计算时包含旋转域部分,背景域为长宽高分别为4.5LPP、1.5LPP、3LPP的长方体。
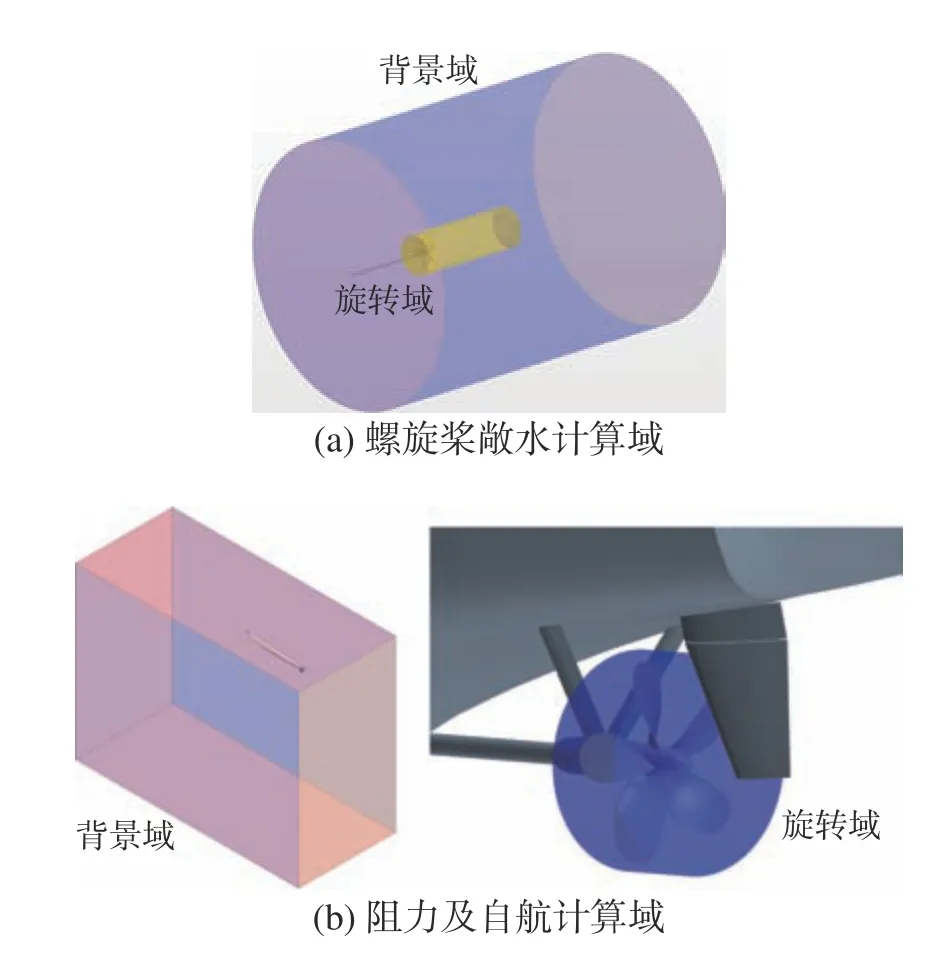
图2 计算域的划分
为了提高非均匀流场的模拟精度,对流场信息进行更加精确的捕捉,需要对计算域特定区域进行加密。本文采用切割体网格进行计算域网格的划分,利用不同尺寸的加密体对船艏、附体、螺旋桨等表面曲率变化较大,以及开尔文波系、螺旋桨尾迹等重点关注的区域进行加密。螺旋桨敞水计算时,对梢涡、毂涡等区域进行网格加密。图3 为不同工况时的网格划分情况。裸船体船模阻力计算、全附体船模阻力计算、螺旋桨敞水计算以及船模自航计算的最终网格数分别为253 万、281 万、420 万、710 万。
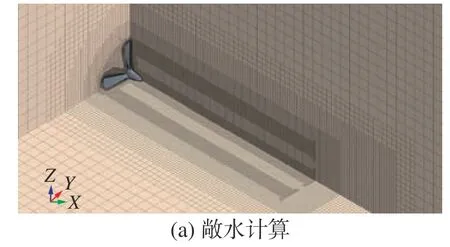

图3 网格划分
2 船模阻力模拟
对DTMB5415 船模在巡航速度(Fr=0.28)以及最高航速下(Fr=0.41)的阻力进行计算,计算中允许船模做纵倾及深沉运动。阻力计算结果与INSEAN 水池试验值的对比如表2 所示。由表可知,2 种航速下的阻力计算值值与试验值的误差均在4%以内,具有较好的求解精度。

表2 阻力结果对比
图4、5 分别为Fr=0.28 时的波形、伴流场计算结果与INSEAN 水池试验结果的对比。由图可知,波形计算结果与试验结果吻合良好,对船艏艉等波形变化剧烈的区域进行了良好的捕捉。同样,伴流场计算结果的等值线轮廓也和试验结果较为接近。船舶精细流场的准确捕捉,为后续的分析结论提供支撑。
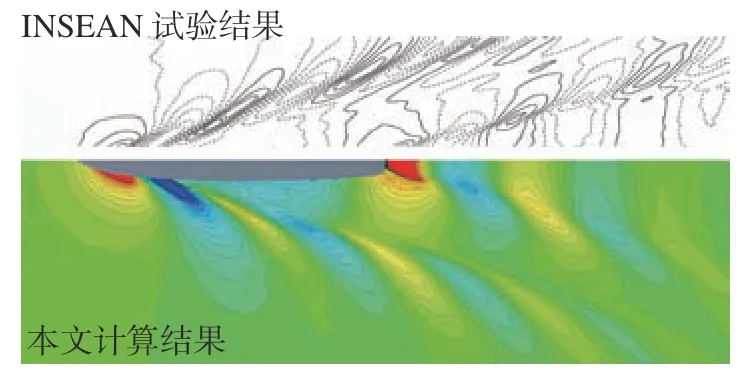
图4 Fr=0.28 时波形计算与试验结果对比
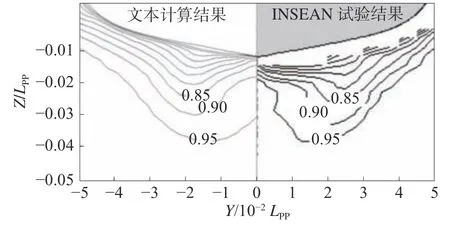
图5 Fr=0.28 时伴流场计算与试验结果对比
3 螺旋桨敞水计算
将螺旋桨的转速设定为22 r/s,通过调整螺旋桨的来流速度,来改变进速系数J的大小。当模型桨的最低雷诺数大于临界雷诺数时,螺旋桨的性能几乎与雷诺数无关,ITTC 规程将临界雷诺数的值设定为3×105,其定义为
式中:VA为进速;b0.75R为0.75 半径处的叶切面弦长;n为螺旋桨转速; υ为水的运动黏性系数。
本文进行螺旋桨敞水计算时的最低临界雷诺数为3.635×105,满足ITTC 规程要求。
图6 为P4508 桨敞水特性计算值与试验值的对比,图中进速系数J的考察范围为(0.2~0.9)。由图可知:在低进速系数时,计算得到的推力、扭矩系数偏小;随着进速系数的增大,扭矩系数计算值增大,推力系数计算值减小。当J≤0.7 时,螺旋桨的效率计算值与试验值吻合良好,误差在5%以内;当J>0.7 时,误差有增大的趋势,但仍在可接受的范围内。
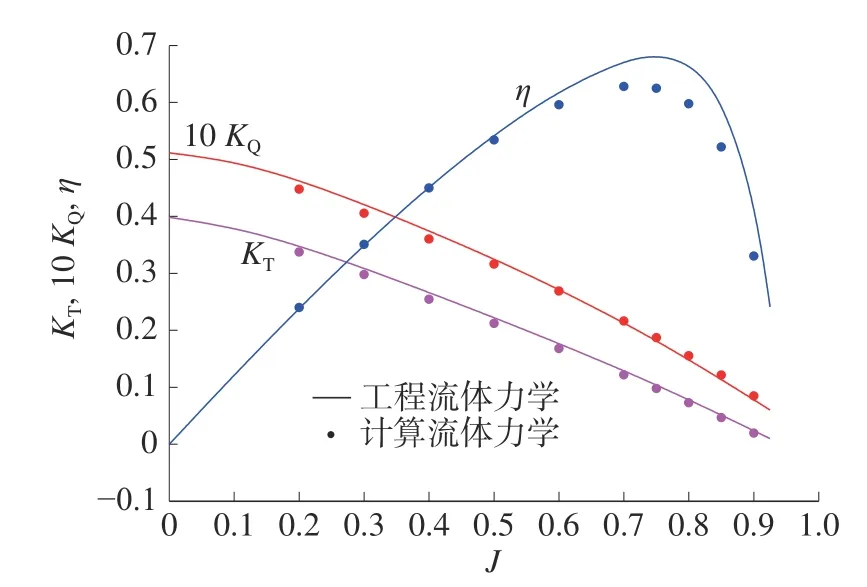
图6 P4508 桨敞水性能
4 船模自航计算
自航试验之前,对DTMB5415 全附体船模的阻力及航行姿态进行了预报。在进行船模自航模拟时,基于前期预报得到的船舶航行姿态数据进行展开,即在计算之前将计算模型预先调整到所对应的阻力试验船模姿态,忽略螺旋桨对船体姿态的微量影响。
在自航试验中,对DTMB5415 船模在Fr=0.28和Fr=0.413(MARIN 水池公布有Fr=0.413 时的试验数据)的自航特性进行数值研究。自航点的求解过程与船模自航试验相同,最终使螺旋桨发出的推力来克服阻力(Rm-FD)。FD为摩擦阻力修正值,其定义为

式中:Rm和ρm分别为模型尺度下的阻力和水密度;Rs和ρs分别为实尺度下的阻力和水密度。
表3 为船桨舵耦合计算得到的Fr=0.413 航速下的实船自航点与MARIN 试验值的对比,两者的差值为-5.3%,满足计算精度需求。自航点转速计算值较低的原因可能在于本研究未安装舭龙骨、减摇鳍等附体,进而在一定程度上降低了船体阻力,从而降低了自航点螺旋桨转速。
表4 为船+桨+舵耦合计算得到的实船性能预报结果,船舶的推力减额分数t、伴流分数w与双桨快速船的经验值相吻合[14]。表中,VS为实船航速,ηH和ηD分别为船身效率和船舶推进效率。
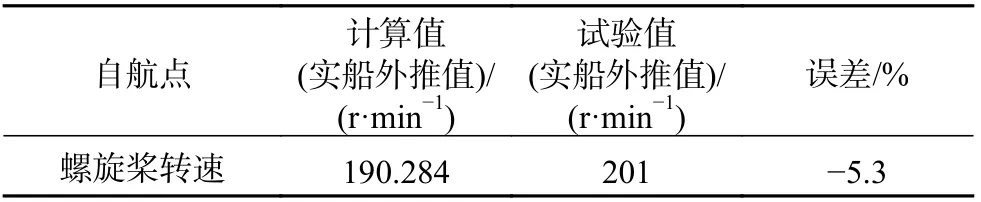
表3 Fr=0.413 时的船-桨-舵耦合自航点

表4 船-桨-舵耦合计算时的实船推进性能
4.1 螺旋桨对船体阻力的影响
为了分析螺旋桨对船体阻力的影响,对船+舵、船+桨+舵状态下的阻力系数Ct、摩擦阻力系数Cf以及剩余阻力系数Cv进行分析,结果如图7所示。由图可知,螺旋桨工作状态下,船模的总阻力出现了一定程度的增大,2 种航速下的阻力增幅在11%~12%;螺旋桨对船舶的摩擦阻力影响不大,尤其是当Fr=0.28 时,剩余阻力的增大才是螺旋桨引起船体阻力增大的原因。
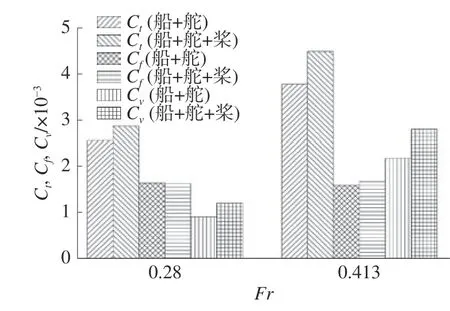
图7 螺旋桨对船体阻力的影响
4.2 螺旋桨对船体压力分布的影响
当船后安装螺旋桨时,螺旋桨旋转会引起其周围流场的变化,而导致上述所说的船体阻力的改变。图8 为安装螺旋桨前后的船艉区域压力系数分布的变化。压力系数为
式中:P为总压力;ρ为水密度;h为水深;V0为轴向速度。

图8 螺旋桨对船体压力的影响
由图8 可知,对于Fr=0.28 时,螺旋桨安装后的“舵区”以及“桨区”的低压区域明显增大,船艉区域的降低就意味着船舶艏艉压力差的增大,进而导致了船体黏压阻力的增大;当Fr=0.413 时,船尾低压区域面积的增幅更大,除了“舵区”以及“桨区”,轴支架附近区域的压力也出现了明显的降低,这解释了此航速下推力减额分数较大的原因。
4.3 螺旋桨对自由表面波形的影响
图9 为安装螺旋桨前后,自由液面波形的变化。由图可知,2 种航速下的船+桨+舵耦合计算时的波高值都要比船+舵计算时的波高值大很多,特别是针对船艉波系的波高值;波高值的增大就意味着兴波阻力的增大,这也是图7 中船体剩余阻力增大的主要原因。

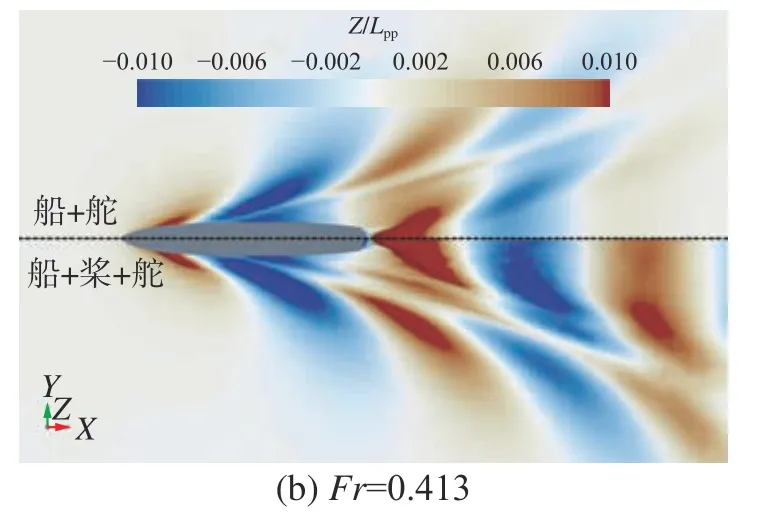
图9 螺旋桨对自由液面波形的影响
4.4 非定常舵力分析
图10 表示Fr=0.413 时的螺旋桨尾涡结构。由图可知,螺旋桨的梢涡、毂涡与舵相遇后进行重构,并在舵后进行传递演化。舵处在螺旋桨不断演化的周期性尾流中,在吸收螺旋桨尾流动能的同时,其受力势必会具有强烈的非定常性。

图10 Fr=0.413 时的螺旋桨涡结构
对计算稳定状态下X方向的非定常舵力(记为Rx)进行监测,并基于时域结果进行快速傅里叶变换(FFT),得到的结果在图11 给出。由图可知:舵力在螺旋桨的尾流中呈现出明显的周期性变化特征;非定常舵力在轴频(axis passing frequency,APF)以及叶频(blade passing frequency,BPF)处为明显的脉动峰值;高航速下(Fr=0.413)非定常舵力的时域曲线表现出锯齿状特征,对应的频域结果除了在轴频以及叶频处出现明显的峰值外,在高频处也存在一定的峰值,说明高频脉动舵力的分量是不能忽略不计的。
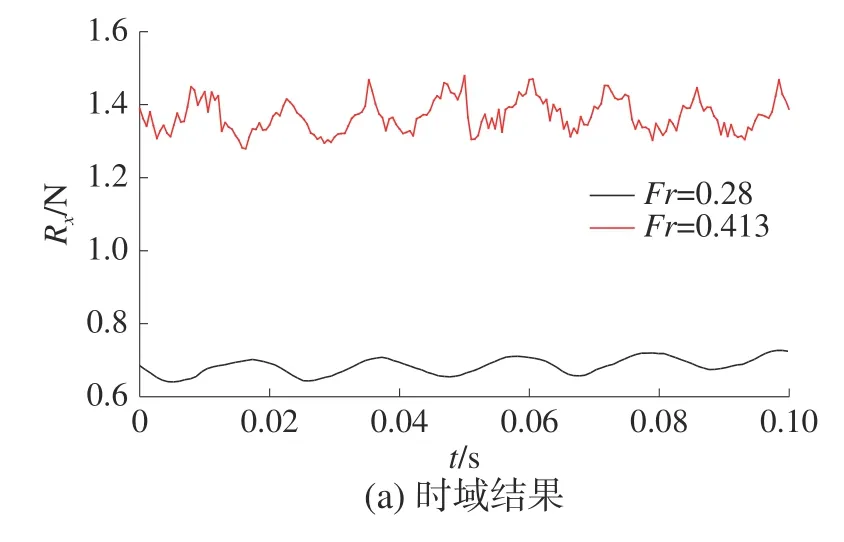
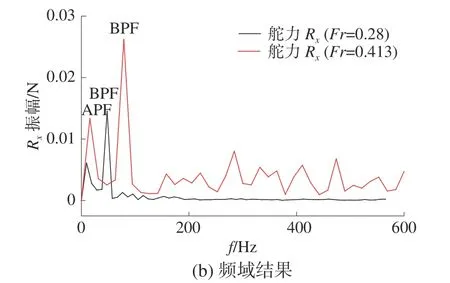
图11 非定常舵力
5 结论
基于数值方法,对船-桨-舵一体化耦合下的双桨船自航特性进行模拟,并分析了船体、螺旋桨以及舵之间的相互影响,可得出的结论如下:
1)螺旋桨的工作使船尾区域的压力降低,并且随着航速的增大,压力的降低幅度更大,从而导致推力减额分数的增大;
2)螺旋桨工作状态下的自由液面波高值明显增大,这是船体剩余阻力增大的重要原因;
3)舵力在螺旋桨的尾流中呈现出规律的周期性变化特征,并在轴频和叶频处出现明显的脉动峰值。
猜你喜欢
微型电脑应用(2022年12期)2023-01-30
舰船科学技术(2022年20期)2022-11-28
航空发动机(2020年3期)2020-07-24
船舶标准化工程师(2019年4期)2019-07-24
中学科技(2017年10期)2017-11-04
舰船科学技术(2016年1期)2016-02-27
船舶标准化工程师(2015年5期)2015-12-03
中国舰船研究(2014年6期)2014-05-14
中国舰船研究(2014年1期)2014-05-14
中国舰船研究(2012年1期)2012-11-09
