
气动肌肉的最小二乘支持向量机迟滞模型
2020-05-29 08:48谢胜龙张文欣鲁玉军张为民朱俊江任国营
计量学报 2020年4期
谢胜龙, 张文欣, 鲁玉军, 张为民, 朱俊江, 林 立, 任国营
(1. 中国计量大学 机电工程学院,浙江 杭州 310018; 2. 浙江西子重工机械有限公司,浙江 嘉兴 314423;3. 中国计量科学研究院,北京 100029;4. 浙江理工大学 机械与自动控制学院,浙江 杭州 310018; 5. 中建海峡建设发展有限公司, 福建 福州 350015)
1 引 言
近年来,随着机器人相关技术的发展,机器人的应用领域已经从传统的工业应用拓展到手术、康复、仿生和救援等领域。由于传统的机器人主要以刚性结构为主,因此难以适应这些领域所需求的灵活性和柔顺性等要求。软体机器人由于采用软材料或柔性材料加工而成,因而可以实现连续变形和大幅度运动,从而很好地弥补刚性机器人的不足[1],因此逐渐受到学术界的关注。气动肌肉(pneumatic muscle,PM)运动过程中迟滞现象的建模与补偿控制对于其精确的运动控制具有重要意义。作为软体机器人的一个重要分支[2],气动肌肉不但具有气压传动的低成本、清洁、安装简便等特点,还具有结构简单、重量轻、输出力/自重比大和工作行程长等优点,同时还具有和人类肌肉相似的柔顺性,因而广泛应用于医疗辅助康复和仿生机器人等领域[3]。
由于构成气动肌肉的编织网内部、编织网与橡胶管之间的多重摩擦,以及橡胶管在充放气过程中的伸缩和气体的压缩性,气动肌肉在运动过程中存在着明显的迟滞特性[4]。迟滞现象的存在,使得气动肌肉在运动过程中产生能量耗散,继而使得控制系统呈现出强非线性,严重影响了气动肌肉的控制精度[5]。为了消除迟滞现象带来的负面效应,国内外对气动肌肉的迟滞建模开展了大量的研究。
Vo-Minh等[6]采用Maxwell-Slip模型对气动肌肉的力/位移迟滞曲线进行了拟合,并借助分段线性化方法辨识了模型中的参数,该方法的优点在于待辨识参数较少,可采用几何的方法进行参数辨识;于海涛等[7]在气动肌肉性能实验测试的基础上,针对其力/位移非线性迟滞,对Tondu模型进行了改进以更好地描述气动肌肉拉力与其收缩率之间的关系,并采用最小二乘法对模型中的参数进行了辨识;赵杰等[8]采用Duhem模型来描述气动肌肉的迟滞现象,利用神经网络方法进行了参数辨识,接着又采用Bouc-Wen模型来捕捉气动肌肉中的迟滞现象[9];由于Maxwell模型、PI模型和Bouc-Wen模型只能描述对称型的迟滞回线,因此Aschemann[10]采用广义Bouc-Wen模型来描述力/长度迟滞回线,并与准静态Maxwell模型和PI模型进行对比,结果表明采用广义Bouc-Wen模型作为迟滞补偿,有更小的轨迹跟踪误差;Lin[11]等则采用广义Bouc-Wen模型、PI模型和Maxwell模型分别建立了气动肌肉的位移/气压迟滞模型,并进行了轨迹跟踪测试,实验结果表明广义Bouc-Wen模型和PI模型比Maxwell模型能更准确地描述气动肌肉中的迟滞特性。然而,上述诸多模型普遍存在着待辨识参数多、参数辨识过程复杂和辨识精度低等问题[12]。最小支持二乘向量机(the least squares support vector machine,LS-SVM)是近年来兴起的一种基于统计学习理论的新型机器学习算法,它以结构风险最小化为原则来自动学习问题模型的结构,能够较好地解决小样本、非线性和高维数的问题[13~15],该方法已经在压电陶瓷等新型材料的迟滞建模与补偿控制中得到了广泛应用[16],但在气动肌肉中尚未见到相关应用。
有鉴于此,本文将LS-SVM方法应用于气动肌肉迟滞建模中,并与传统的PI模型进行对比。首先分别介绍LS-SVM方法的原理和PI模型;接着搭建了气动肌肉位移气压迟滞特性实验平台;分别基于LS-SVM方法和PI模型对气动肌肉迟滞现象进行建模和比较分析,并最后得出相关结论。
2 建模原理
2.1 LS-SVM原理
最小二乘支持向量机的核心思想是:通过核函数K(·)定义的非线性映射φ(·)将原样本数据空间映射到一个高维的特征空间中,使得原系统的非线性学习问题变成高维特征空间的线性学习问题;然后在此高维特征空间中构造线性最优回归函数f(x)=wTφ(x)+b;基于结构风险最小化原则求出该回归函数中的w和b。其基本原理如下:
给定一组训练样本集
S={(x1,y1),…,(xN,yN)},x∈Rm,y∈Rn
(1)
式中:N为数据样本个数;x为输入数据向量;y为输出数据向量;m为输入数据维数;n为输出数据维数,本文取n=1。
根据结构风险最小化原则[17],该训练样本集的优化数学模型为:
(2)
式中:γ为正则化因子;b为偏置量;ei为松弛因子。
为计算优化函数的最小值,构造拉格朗日函数L如下:
(3)
式中αi为拉格朗日乘子。根据Karush-Kuhn-Tucker(KKT)最优条件[18], 对上述拉格朗日函数求驻点可得:
(4)
为使目标函数取得最小值,需使拉格朗日方程中所有变量的偏导数均为0。通过消去w和e,求解的优化问题转化为求解线性方程组(5):
(5)
式中:y=[y1,…,yn]T;I=[1,…,1]T;α=[α1,…,αN]T;D=diag[γ1,…,γN]-1。
于是最小二乘支持向量机的算法优化问题式(2)就转化为求解线性方程组(5),该线性方程组可用最小二乘法求解。
为了避免求解上述映射函数以及计算高维特征的内积φ(xi)Tφ(xj),根据Mercer条件,存在映射函数φ(·)和核函数K(·),使得
K(xi,xj)=φ(xi)Tφ(xj),i,j=1,…,N
(6)
核函数K(·)可以选择任意满足Mercer条件的函数。常用的核函数有线性核函数、多项式核函数和径向基核函数;本文选取高斯型径向基核函数,其表达式为:
(7)
因此,最后可得到用于气动肌肉迟滞建模的最小二乘支持向量机回归函数表达式为:
(8)
式(8)中的拉格朗日乘子αi和偏置量b可由式(5)求得。所得最小二乘支持向量机的结构如图1所示。

图1 LS-SVM结构
2.2 PI模型
PI模型是Preisach模型的改进,该模型由有限个线性play算子加权叠加构成,单个线性play算子可以表示一个简单的迟滞系统。该模型的优点是逆模型可通过解析方法得到,因而易于实时控制。线性play算子(又称为Backlash算子)基本结构如图2所示,每一个线性play算子由一个阈值r确定,由于线性play算子的连续性,只需少量的线性play算子叠加就可以精确描述一个复杂的迟滞系统。
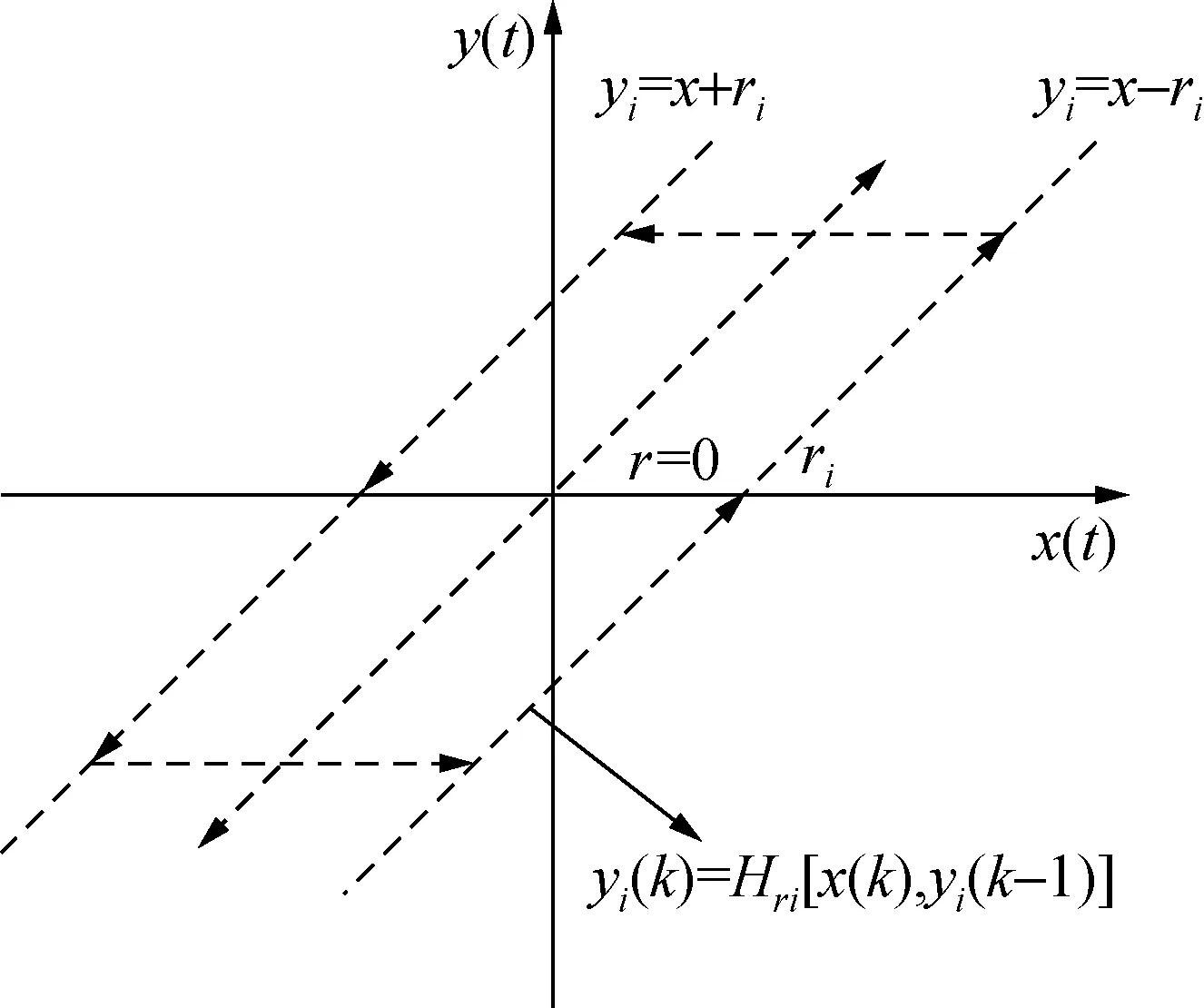
图2 线性play算子
通过对不同阈值的线性play算子线性加权叠加即可得到PI模型,如图3所示。

图3 PI模型
第i个算子表达式为:
yi(k)=max{x(k)-ri, min[x(k)+ri,yi(k-1)]}
(9)
初始条件为:
yi(0)=max{x(0)-ri, min[x(0)+ri,yi0]}
(10)
式中:yi(k)为第i个算子在k时刻的输出;x(k)为实验中k时刻的输入;yi(0)为各个算子初始输出;线性play算子初始状态向量为y0=(y10,…,yn0),且yi0=0,i=1,…,n;n为线性play算子的个数;ri为阈值,阈值向量r=(r1,…,rn)。
对于多个不同阈值的线性play算子进行线性加权叠加,即可得到PI迟滞模型输出公式为:

(11)

2.3 PI模型参数辨识
从式(11)可以看出线性play算子的待求量为权重ωi和阈值ri。为了简化计算,阈值取为[19]:
(12)
式中n为算子个数。
相比最小二乘法,带遗忘因子的递推最小二乘法通过引入遗忘因子以加强新的数据提供的信息量,逐渐削弱旧的数据,防止数据饱和,从而可以加快算法的收敛速度,提高算法的预测精度。因此本文采用该方法求解PI模型中的权重,由式(11)可知:
(13)
式中:ω为待估计权重参数向量;Hr[x(k),y(k-1)]为数据向量。令ω=θ,Hr[x(k),y(k-1)]=φ(k)。则有
(14)
其中
φ(k)=[φ1(k),φ2(k),…,φn(k)]T
(15)
φi(k)=yi(k)=max{x(k)-ri,
min[x(k)+ri,yi(k-1)]}
(16)
ω=[ω1(k),ω2(k),…,ωn(k)]T
(17)
则有:
(18)
式中:遗忘因子λ须选择接近于1的正数,通常不小于0.9。
在应用上述递推公式前,需确定初值P(0)、θ(0)。本文采用文献[20]中介绍的方法,直接令

(19)
式中:α为充分大的正实数,104~1010;ε为零向量或充分小的正的实向量。
参数辨识完成后,PI模型的拟合输出yp(k)为:

(20)
3 实验与分析
本文搭建了气动肌肉的位移/气压迟滞特性实验平台,通过实验得到其位移/气压迟滞的实验数据,并分别比较了采用LS-SVM和PI模型两种建模方法的建模效果。
3.1 实验系统
气动肌肉的位移/气压迟滞实验装置如图4所示,它由气动肌肉、比例调压阀、空气压缩机、位移传感器、气压传感器和计算机组成。气动肌肉为德国费斯托公司所生产,其进气端固定于机架上,另一端可自由移动;位移传感器一端固定于机架上,另一端则与气动肌肉的自由端通过连接件相连,用于实时测量气动肌肉运动过程中的位移值;气压传感器与气动肌肉内腔相连,用于实时测量气动肌肉内腔的气压值。借助LabView软件编写气动肌肉的控制和数据采集程序,控制程序用于控制比例阀的电压,进而控制气动肌肉内腔的气压变化;数据采集程序用于实时采集气动肌肉运动过程中的位移和气压信号。实验中所用的主要元器件及其型号见表1。

图4 气动肌肉迟滞特性实验
实验过程如下:调节气动肌肉,使其初值状态下内部气压等于大气压;启动控制程序,调节比例调压阀使气动肌肉内部绝对气压缓慢地从0 MPa增加到0.6 MPa;当其内部气压到达0.6 MPa后,再调节比例调压阀使其内部绝对气压缓慢降到0 MPa。通过LabView编写的数据采集程序可得到气动肌肉在上述充放气过程中的气压和长度数据。将气动肌肉的位移转换成收缩率,即可得到气动肌肉的位移/气压迟滞曲线数据。
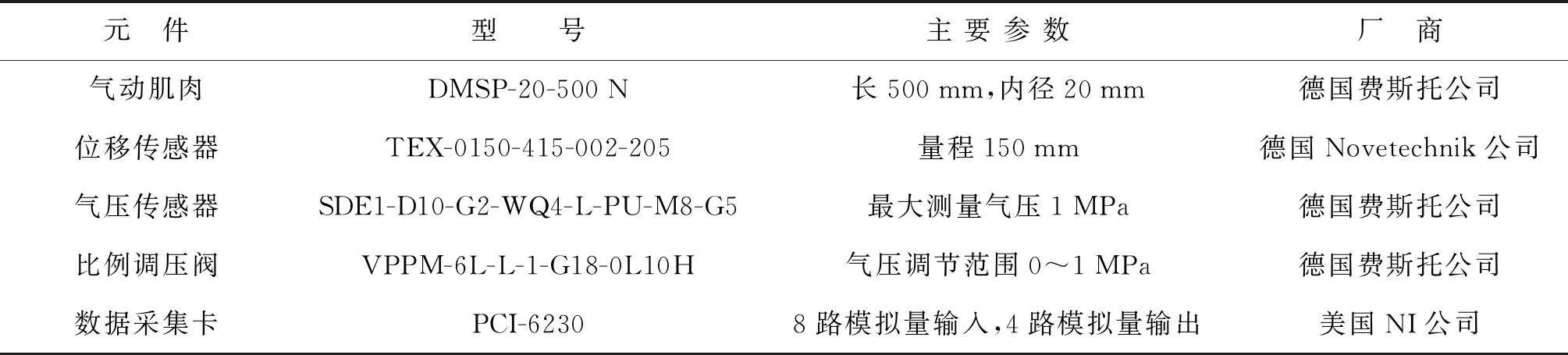
表1 实验设备元件型号
3.2 实验数据处理与分析
由于在气动肌肉运动过程中,环境中的噪声和扰动等动态因素对其输出有较大的影响,除了在实验过程中采用物理隔振外,后期的滤波降噪等数据处理过程也必不可少。为了提高滤波效果,本文采用中位值滤波和算数平均值滤波组合的方法,以消除气动肌肉因蠕变和气压突变等因素引起的影响。其中中位值滤波法用于消除偶然因素引起的波动干扰,算数平均滤波一般用于具有随机干扰的信号的滤波。
中位值滤波通过对连续N次采样的结果按大小排列,取其中间值作为有效值;算数平均值滤波通过对连续N次采样的结果进行算数平均运算作为有效值,其计算式为:
(21)
式中:x(k)为滤波值;xi为第i个采样值。该滤波方法的实质是通过将n个采样值相加,求其平均值,作为k时刻的值。
最终得到的气动肌肉位移/气压迟滞模型如图5所示。由图5可以看出,在气动肌肉充气时收缩,气动肌肉从A点运动到B点;放气时伸长,从B点运动到A点。在充气过程中,当气压增加到P时,对应的气动肌肉的长度为P1,对应图中的Pc点;在放气过程中,当气压减小到P时,对应的气动肌肉的长度为P2,对应图中的Ps点。显然,Pc点与Ps点并不重合,两者之间不重合的现象即为气动肌肉充放气过程中的迟滞现象。
3.3 建模结果分析
在采集到的气动肌肉位移/气压迟滞曲线数据的基础上, 分别采用LS-SVM方法和PI模型对其开展建模研究。 其中,令LS-SVM方法中初始参数γ为10,σ2为0.4;PI模型中线性play算子个数为20。

图5 气动肌肉位移/气压迟滞

图6 LS-SVM辨识结果
LS-SVM方法的建模结果如图6和图7所示。图6表明LS-SVM方法能很好地描述气动肌肉位移/气压迟滞现象。为了直观地显示LS-SVM方法与实验数据之间的差别,图7给出了该方法的建模误差,结果表明误差较小,几乎可以忽略不计。
作为对比,图8和图9给出了传统PI模型的建模结果。图9中,0~2.5 s为气动肌肉充气收缩时的误差,2.5~5 s为气动肌肉放气伸长时的误差。图8中,PI模型在收缩率较低时吻合较好,而收缩率较高时建模误差明显变大,这一点与图9中 1.5~3 s的时间段相吻合。推测产生这种现象的原因是因为2.2节数据处理的过程中该段保留数据较多,偏差较大数据的干扰使得该段建模误差较大。对比图7和图9中两种方法的建模误差,表明LS-SVM方法的建模精度明显优于传统的PI模型。
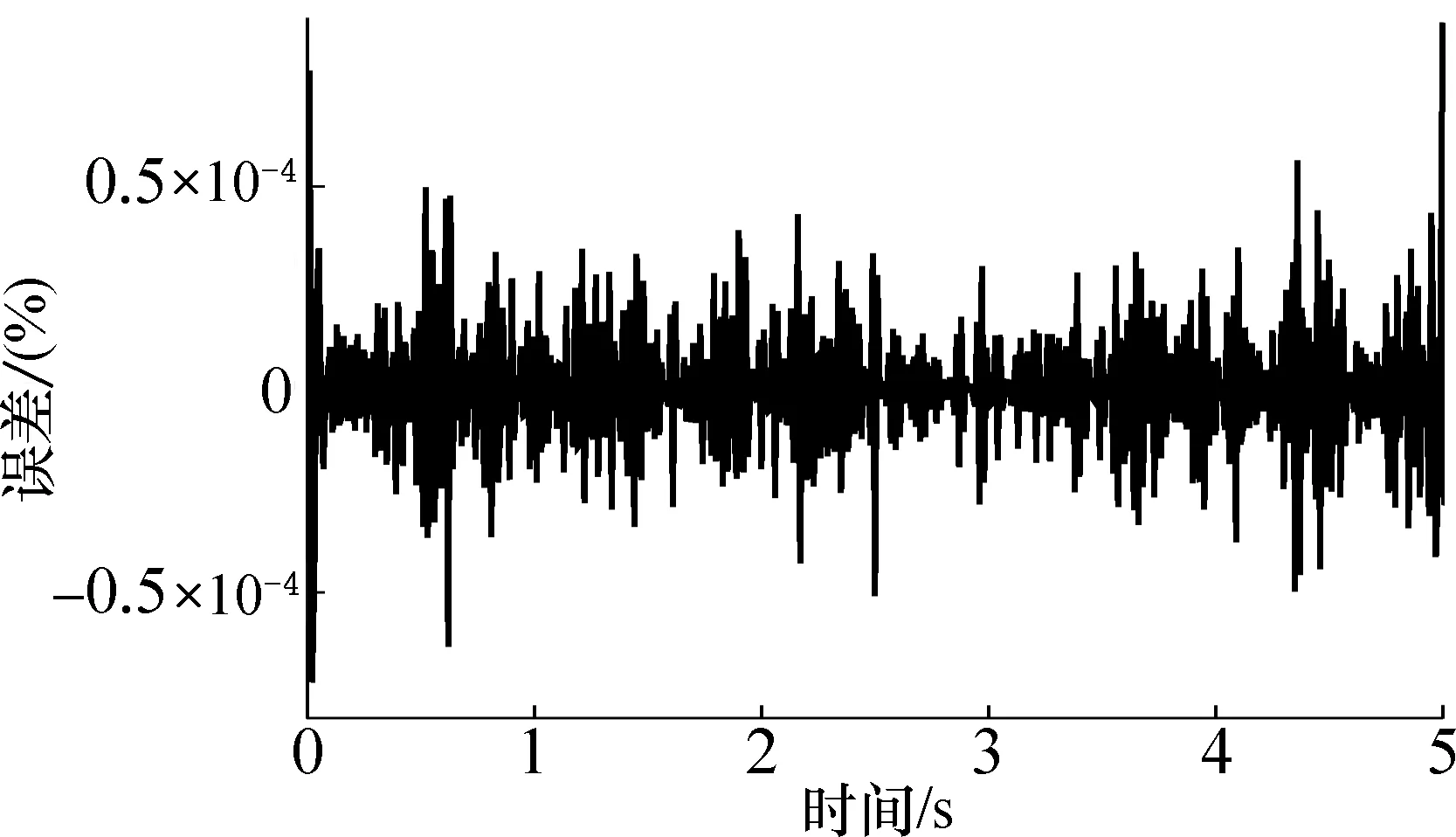
图7 LS-SVM辨识误差
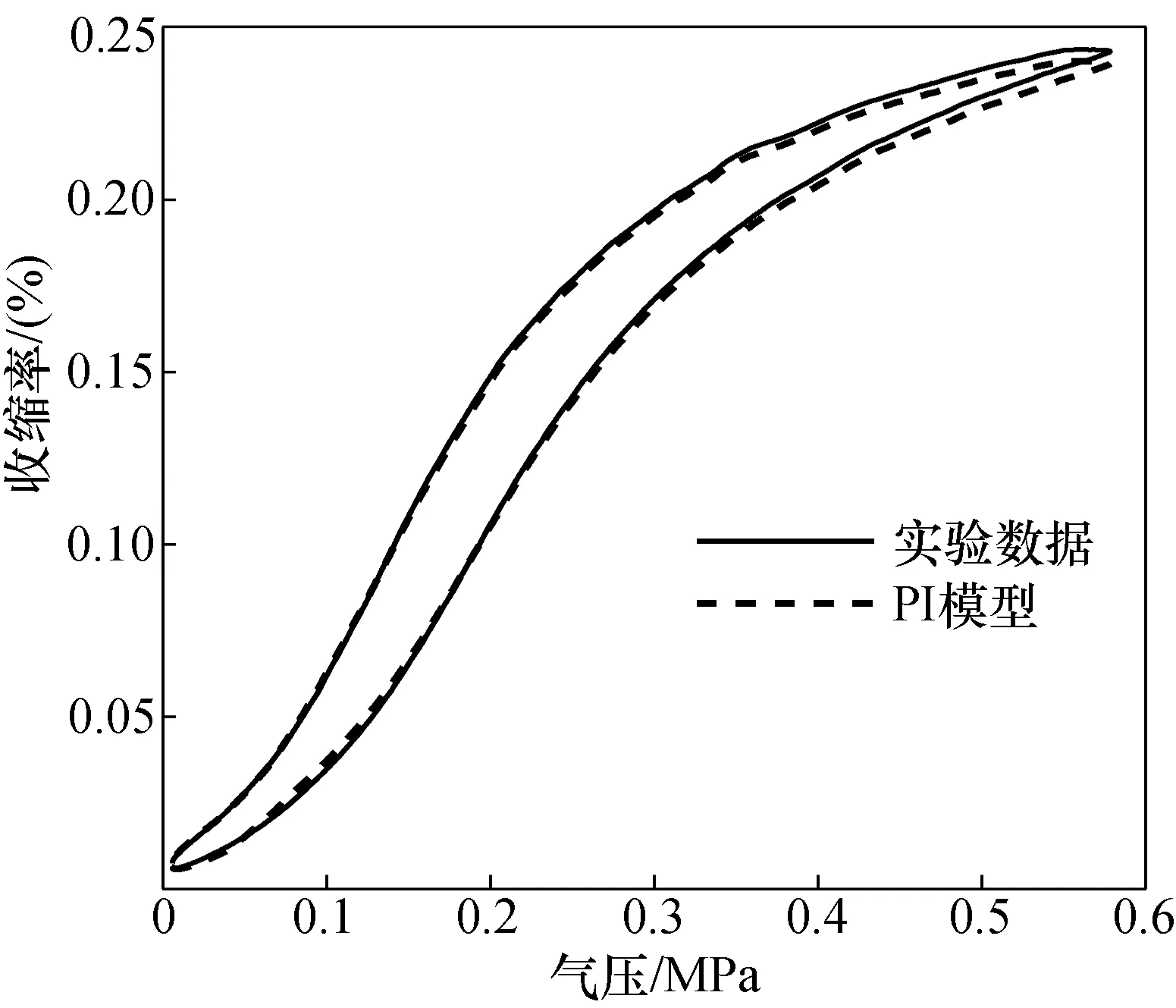
图8 PI模型辨识结果

图9 PI模型辨识误差
为了进一步量化比较两种模型的建模精度,本文根据文献[21]中提到的误差公式计算两种方法中理论模型与实际实验数据之间的均方差erms和平均误差emae:
(22)
(23)
式中:y为实验数据;yM为迟滞模型的拟合输出。所得的平均误差和均方差如表2所示。
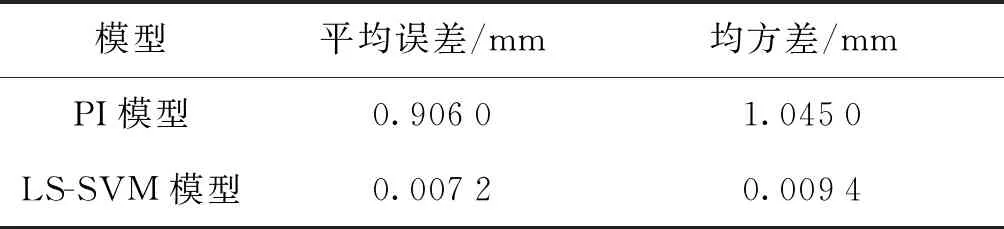
表2 模型误差比较
由表2可知,相较于PI模型,LS-SVM模型的建模精度得到了显著的提高,平均误差减小了99.21%,均方差减小了99.1%。
4 结 论
针对气动肌肉运动过程中的位移/气压迟滞非线性现象,本文采用最小二乘支持向量机方法对其位移/气压迟滞开展了建模研究。结果表明,相比传统的PI模型,其建模精度得到了明显的提高,均方差和平均误差均显著减小,可为后续基于该方法的气动肌肉迟滞补偿控制提供了理论指导。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
天然气与石油(2022年4期)2022-09-21
幼儿画刊(2021年5期)2021-12-02
北京航空航天大学学报(2021年6期)2021-07-20
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
应用数学(2020年2期)2020-06-24
装备制造技术(2020年12期)2020-05-22
液压与气动(2020年2期)2020-02-18
模具制造(2019年4期)2019-06-24
