用“箭头法”巧解《差动螺旋传动》
2020-05-29 07:58王艳
湖北农机化 2020年5期
王 艳
(江苏省江阴中等专业学校周庄校区,江苏 江阴 214000)
在《机械基础》课程教学中,一直以来“差动螺旋传动”都是教学的难点,也是机械、机电专业对口单招综合理论考试的热点。然而,学生在做到此类题型时总是会出现这样或那样的问题,在利用公式解决此类问题时,常会出现不判断差动件位移L的正负,搞不清三个件的位移关系等问题,因此导致解题错误。针对这些问题,笔者通过多年的教学实践,总结出了“箭头法”来巧解《差动螺旋传动》中的问题。
1 考情分析
(1)在机械机电类对口单招专业综合理论试题中,普通螺旋传动、差动螺旋传动每年必考,差动螺旋传动题型一般为选择题或填空题,也可能出在计算题或轮系中,而普通螺旋传动较为简单,多出现在轮系中。所以差动螺旋传动仍是今后考查的热点。
(2)差动螺旋传动出题也有难易,若简单些计算差动 螺旋传动中包含的两个普通螺旋传动:一是既转又移件对机架的移动距离及移动方向;二是只移不转件对既转又移件的移动距离及移动方向,再复杂些计算常规差动件的移动距离及方向,难点的则是已知公式中其他条件确定其中一个螺旋副的导程和旋向或要求确定一个螺旋副的旋向与另一个螺旋副的导程。做计算题时我们是利用公式,假设旋向,代入公式讨论的方式解题,解题过程相对较复杂,尤其是L的正负的确定。若是选择题或填空题我们则可以采用箭头法来解题,下面我们就来介绍一下。
2 差动螺旋传动
差动螺旋传动的组成,由机架、既转又移件和只移不转件组成,主要特征是含有两个螺旋副,既转又移件与机架之间形成了“一定一转并移”的普通螺旋传动形式;只移不转件与既转又移件之间形成了“一转一移”的普通螺旋传动形式。只移不转件相对于机架形成了差动。
常规的计算:
①螺杆移动距离和方向(螺杆相对机架的计算,既转又移件组成的普通螺旋传动的计算)
L=NPha单位:mm 方向:不动则同(口诀)
②活动螺母相对螺杆的移动距离和方向(只转不移件形成的普通螺旋传动的计算)
L=NPhb单位:mm 方向:动则不同(口诀)
③活动螺母移动距离和方向(相对机架形成的差动)
L=N(Pha±Phb)(两螺旋副旋向相同取“-”,旋向相反取“+”)
方向判别:L>0,则活动螺母移动方向与螺杆移动方向相同;否则相反。
关键:先判断螺杆移动方向,再根据L的正负来判断活动螺母移动的方向。
3 箭头法
根据上面的介绍可以总结出:差动件的位移等于既转又移件对机架的位移与只移不转件对既转又移件的位移的代数和。这里位移是一个有方向的量,所以我们可以用向量来表示,这样就可以将差动位移转化成求普通螺旋传动的位移,从而简化了难度。
(1)常规题型(高考真题)如图所示为一差动螺旋传动机构。螺杆1左右两段螺纹旋向相同,均为右旋。螺旋副A、B的导程分别是:PhA=4mm,PhB=3.5mm。当螺杆转动1/100周时,螺母3移动的距离是0.005mm,移动方向向右。
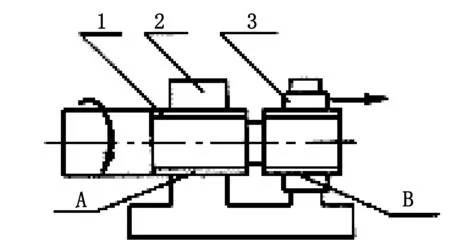
图2


像此类题型,已知两螺旋副的旋向和导程及既转又移件的转向,求只移不转件的移动距离及移动方向。箭头法的解题看不出优势,用公式解的话更为简单。但在变式题型中,即其中两个螺旋副中四个参数有任意两个未知,只移不转件的移动距离和移动方向已知,解决此种题型就凸显了箭头法的优势。
(2)变式题型(高考真题)如图所示为某差动螺旋传动机构,件2为机架,件3只能做移动。件1按图示方向回转一周时,件3相对件1向左移动了3mm,相对件2向左移动了1.5mm,则A处螺纹的旋向和导程分别为(C)。
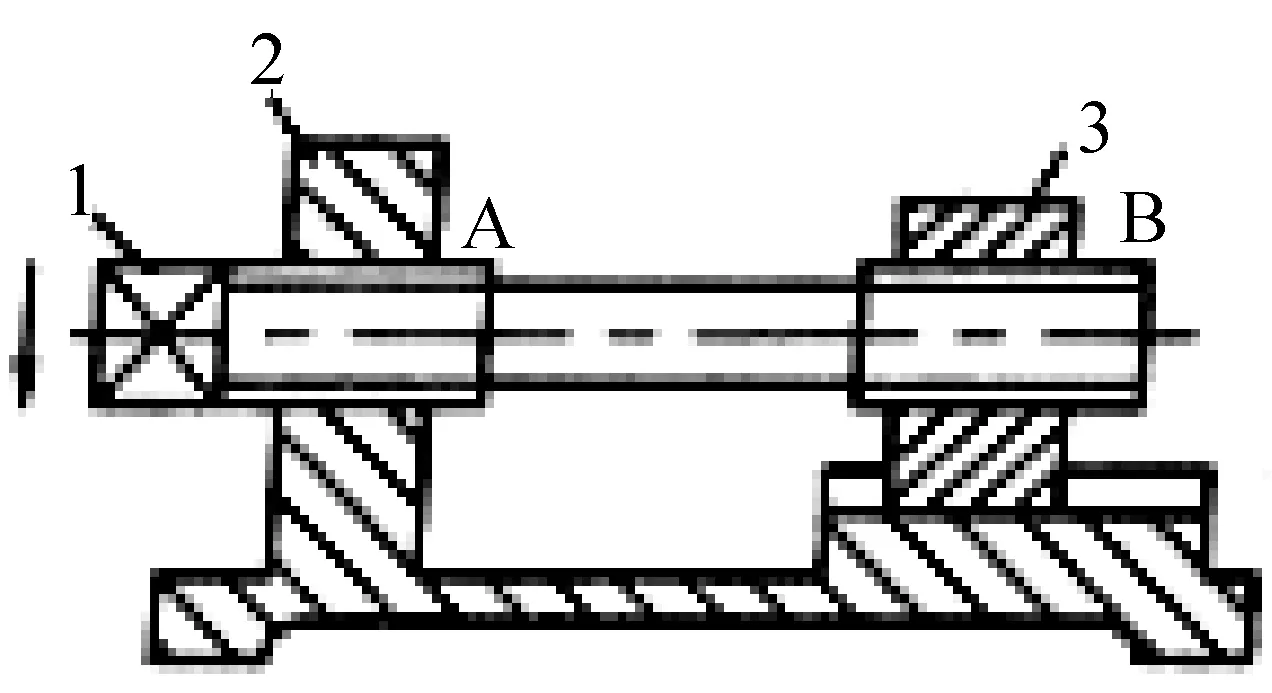
图3A.左旋1.5mm;B.左旋4.5mm;C.右旋1.5mm;D.左旋1.5mm
常规的公式法:假设1对2向左移,则L=LA+LB=LA+3=1.5,LA=-1.5mm(舍去);假设1对2向右移,则-1.5=LA-3,LA=1.5mm。再根据不动则同,判断出A处螺旋副为右旋。
箭头法解出2相对于1是向右运动根据左右手定则(不动则同)判断出A处为右旋。
此题因为1对2的移动方向及移动距离也未知,所以采用常规的公式解题需要假设1对2的移动方向,才能确定件3相对件2的移动距离的正负。然而采用箭头法则更直接,更简便些。
4 箭头法解题的步骤
找出差动螺旋传动中,既转又移件,只移不转件和机架。
计算出两个普通螺旋副中移动件的移动距离及移动方向,并用向量表示。
明确既转又移件对机架的位移与只移不转件对既转又移件的位移合成的只移不转件对机架的差动位移。
上述三个位移知道任意两个求出另外一个。再根据移动方向利用左右手定则和口诀(不动则同;动则不同)判断出螺旋副的旋向。
5 总结
箭头法与公式法比较,省去了讨论的步骤,减少了学生出错的概率,提高了解选择题和填空题解题的效率,同时让学生更能够清晰地理解差动的概念,将解决差动的问题转化成了解决普通螺旋传动的问题。
猜你喜欢
机械设计与制造(2022年10期)2022-10-12
家庭影院技术(2019年12期)2020-01-19
电子制作(2019年10期)2019-06-17
电子制作(2018年14期)2018-08-21
中国计算机报(2018年13期)2018-05-23
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02
小朋友·快乐手工(2016年9期)2016-05-14
钢管(2014年3期)2014-09-25
数学大世界·小学低年级辅导版(2009年8期)2009-07-28