车辆系统垂向与横向耦合的侧倾状态估计*
2020-05-28 06:26王振峰王新宇秦也辰
汽车工程 2020年5期
王振峰,李 飞,王新宇,高 普,秦也辰
(1.中国汽车技术研究中心有限公司,天津 300300; 2.中汽研(天津)汽车工程研究院有限公司,天津 300300;3.北京理工大学机械与车辆学院,北京 100081)
前言
车辆电动化、智能化和网联化是汽车工业发展的必然趋势,如何进一步提升车辆动力学性能仍是当今国际学术界与工业界研究的热点与难点[1]。车辆侧倾运动在汽车行驶安全中起着至关重要的作用;依据美国国家公路交通安全局(NHTSA)调查数据显示,2002年在所有乘用车碰撞事故中车辆侧翻约占3%,但事故死亡率的33%与车辆侧翻相关[2]。该信息表明车辆侧倾对驾驶员与乘客存在巨大潜在危险。因此,实时获取车辆侧倾状态,进而为侧翻预警系统提供准确的状态输入显得尤为重要。考虑到运行成本与状态精度的矛盾,通常利用状态观测器算法识别车辆侧倾状态[3]。由于道路激励产生的车辆侧倾运动具有一定随机性,因此须利用非线性观测器方法达到对车辆侧翻状态的实时精确识别[4-5],近期相关学者对车辆侧倾状态的研究统计如图1所示。

图1 出版文章趋势:谷歌学术关于车辆侧倾状态识别文章的搜索结果统计[6]
不确定的系统参数可能会污染系统模型,进而基于模型的状态估计算法识别误差剧增。基于以上分析,此处利用非线性无迹卡尔曼滤波(UKF)方法识别车辆簧载质量参数,且通过仿真方法验证其有效性[7]。同时,在文献[8]中利用扩展卡尔曼与无迹卡尔曼相结合的非线性状态观测算法对车辆簧载质量与横摆力矩进行了有效估计;近年来相关学者对车辆簧载质量估计的研究统计如图2所示。

图2 出版文章趋势:谷歌学术关于车辆簧载质量识别文章的搜索结果统计[6]
为进一步提高车辆侧倾状态识别精度,本文中设计了基于无迹卡尔曼滤波与模糊观测器(T-S)联合的非线性估计算法(UKF&T-S)分别对车辆簧载质量与侧倾状态进行耦合估计,结合商业化CarSimⒸ动力学软件与传统T-S观测器,对UKF&T-S算法进行了有效验证,为利用基于状态观测器的车辆侧倾控制系统提供准确的系统输入,进而达到准确提升车辆侧倾动力学性能的目的。
1 路面激励模型
考虑到路面具有平方可积的性质且路面高程为随机过程,其特性可用功率谱密度函数的形式描述[3]。国际标准化组织(ISO 8608)将路面高程分成8个不同等级[9],且利用功率谱密度函数表征其特征:

式中:q为路面相对基准面高度;n为空间频率,m-1;Gq(n0)为参考频率 n0下的路面功率谱密度,m2/m-1;n0为参考空间频率,n0=0.1 m-1;W为频率指数,其数值决定了路面功率谱密度的频率结构,通常W=2。
由于车辆垂向与横向耦合动力学研究涉及路面不平度的三维建模,此处利用直线行驶工况下传统的二维路面不平度功率谱密度(PSD)函数与傅里叶变换得到:

式中:M和N为样本数;fp和fq为离散空间频率;F(fq,fp)为函数 h(m,n)傅里叶变换。
三维路面建模的详细过程可参见文献[10]。标准ISO-A级三维路面不平度(40 km/h)的分布如图3所示。
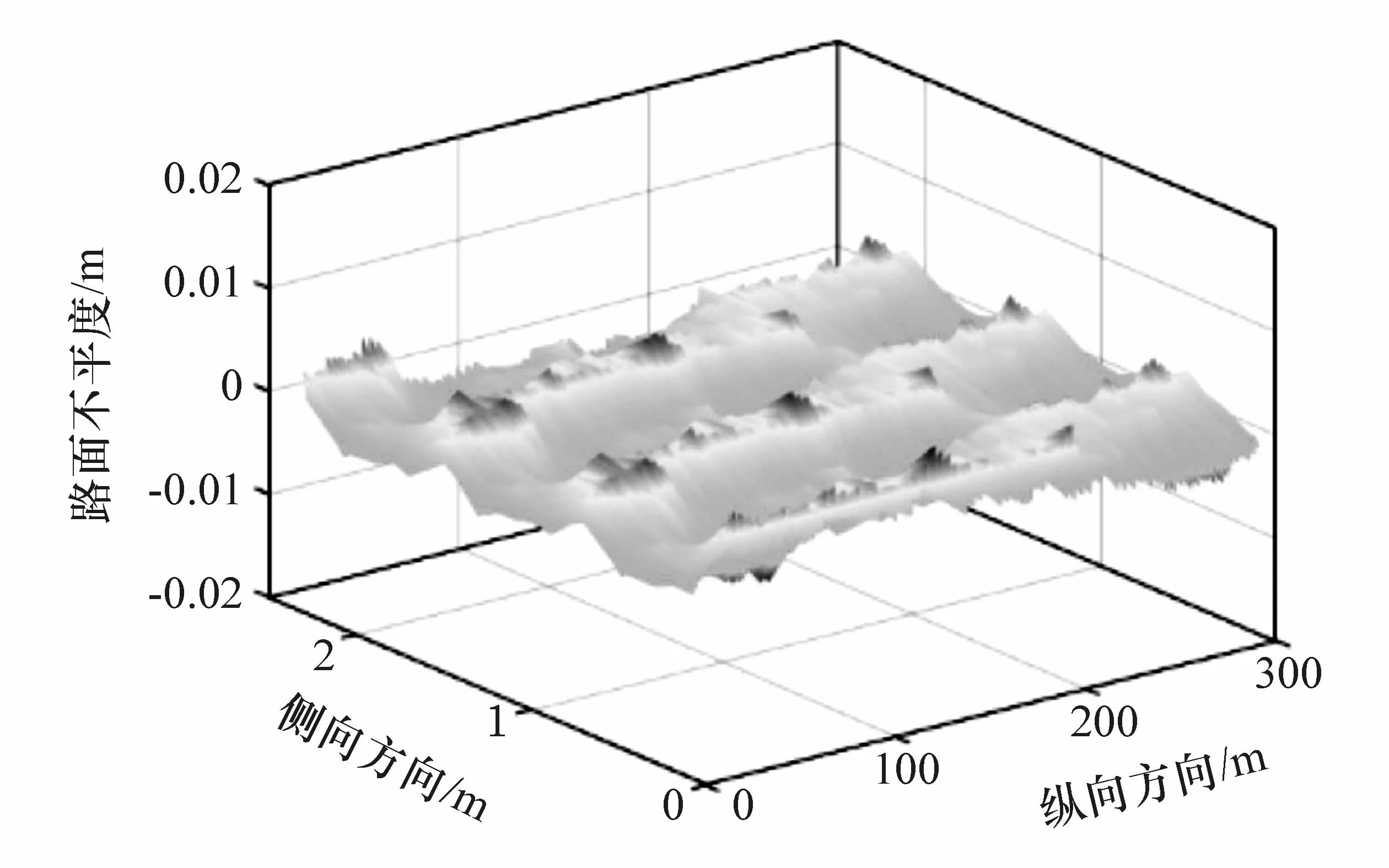
图3 标准ISO-A级路面三维路面不平度生成图形(40 km/h)
2 车辆动力学建模
2.1 整车垂向与横向耦合动力学建模
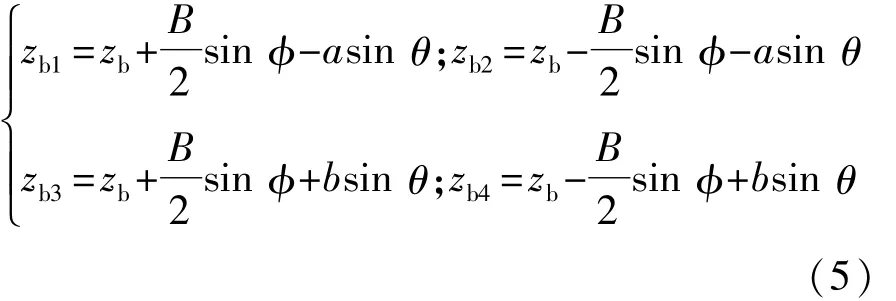
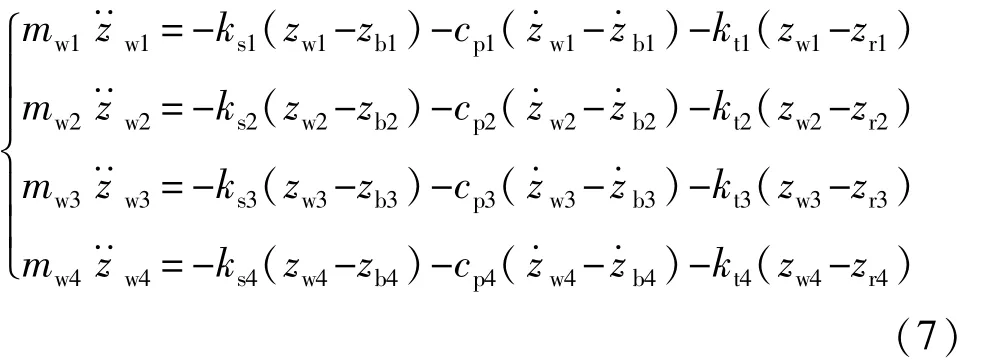
本节中基于建立了9自由度(9DOF)整车模型,如图4所示,且具体假设如下[10]:
(1)轮胎与路面之间无滑移,且不考虑车辆的纵向加速度;
(2)忽略空气阻力与转向系统的影响。

图4 整车9DOF动力学模型
图4 中所示的符号定义及参数数值可参见文献[10],模型参数主要来自于商用化CarSimⒸ动力学软件(D-Class,SUV车型)。
假设 i(i=1,2,3,4)分别表示车辆的左前、右前、左后和右后位置的情况。
利用牛顿第二定律,整车9DOF模型动力学方程表达如下。
车身垂向运动:

式中Fs为总的悬架垂向力,相应的计算可利用以下方程获取。

其中:
车辆俯仰运动:

式中 My为车辆总的俯仰转动惯量,且 i=1,2,3,4。非簧载质量的垂向运动:
车辆侧倾运动:
式中Mx为车辆总的侧倾转动惯量。
车辆横向运动:

式中Fy为车辆总的侧倾转动惯量。此处需要说明的是,测量侧向力通过“魔术”公式求得,相关详细信息见文献[11]。
车辆横摆运动:
式中:Mz为车辆总的横摆转动惯量;Mzi为轮胎回转力矩,且 i=1,2,3,4。
若假设车辆系状态与测量状态有以下变量表达:

则车辆系统可用以下状态空间矩阵表达:

式中:A、Γ和C为系统矩阵;w和v分别为车辆系统噪声和测量噪声,且均假设为高斯噪声,其协方差统计特征Q和R可由Q=E(wkwkT)和 R=E(vkvkT)计算得到。
2.2 整车模糊(T-S)模型
由于“魔术公式”(MF)轮胎模型属于经验模型,其需要结合轮胎试验才可有效获取不同工况下轮胎模型中的非线性与可变参数。基于以上轮胎建模思路,MF建模方法极大限制了实际车辆轮胎模型的整车动力学仿真效率与成本。为有效解决以上难题,本文中提出了模糊(T-S)轮胎模型用于轮胎非线性侧向力的建模。首先,基于车辆动力学理论,车辆侧向力是侧偏角的函数,且可表达为
其中

式中:δf与 v分别为前轮转向角和车速;αf和 αr分别为前轮和后轮侧偏角;Bi、Ci、Di和 Ei(i=f,r)分别为侧向力拟合系数,且与轮胎特性、路面附着系数和车辆行驶工况相关。
基于车辆理论与T-S模糊理论,车辆侧向力可表示为

式中 μj(j=1,2)为模糊集 Mj的隶属度函数因子,且满足以下方程:

隶属度函数可表达为
其中

式中:Cfi和Cri分别为前轮和后轮侧偏刚度,其由路面附着系数和车辆参数确定;ai、bi和ci为参数。可利用算法进行有效识别,具体相关描述见文献[12]。
用T-S模糊规则,可较好获取具有轮胎T-S侧向力模型的整车T-S模型。基于以上分析,进行了T-S轮胎侧向力与MF轮胎侧向力的计算结果对比,如图5所示。仿真数据结果说明,T-S轮胎模型具有与MF模型较好的一致性,有效验证了前者的合理性。

图5 T-S轮胎模型与MF模型对比结果
考虑到车辆行驶工况复杂性和簧载质量多变性,尤其后者对车辆动力学识别精度有显著影响;具体整车质量可表示为 ms(k)=ms(k-1)+Δm(k),且k为时间步,Δm(k)为实际簧载质量增量。因此,式(12)整车系统状态空间表达式对应的状态空间增量表达式为

式中Aii、Γii和Cii可通过A、Γ和 C矩阵的系数乘积得到。同时,关于未知路面速度干扰可近似为高斯白噪声过程,更多信息可参看文献[3]。
3 无迹卡尔曼滤波与模糊算法(UKF&T-S)联合估计分析
此部分的目的主要是精确获取不同路面激励和转角工况下车辆的簧载质量和侧倾运动状态(侧倾角与侧倾率),具体的UKF&T-S联合估计算法框架如图6所示。

图6 车辆侧倾状态UKF&T-S联合估计算法框图
3.1 整车簧载质量UKF估计算法
基于文献[8]的描述,利用UKF算法可对车辆簧载质量进行有效估计:
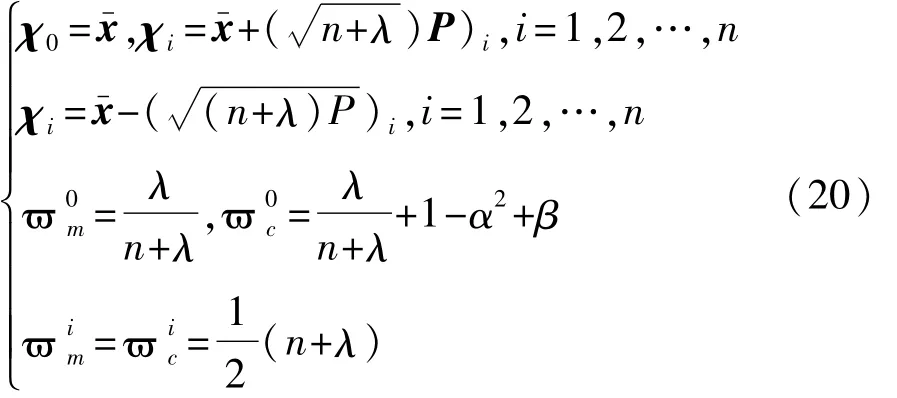
式中:λ=α2(n+κ)-p为主比例参数;α为正值;κ为副比例参数;β为分布向量协调因子为第i行对角矩阵P的平方根。
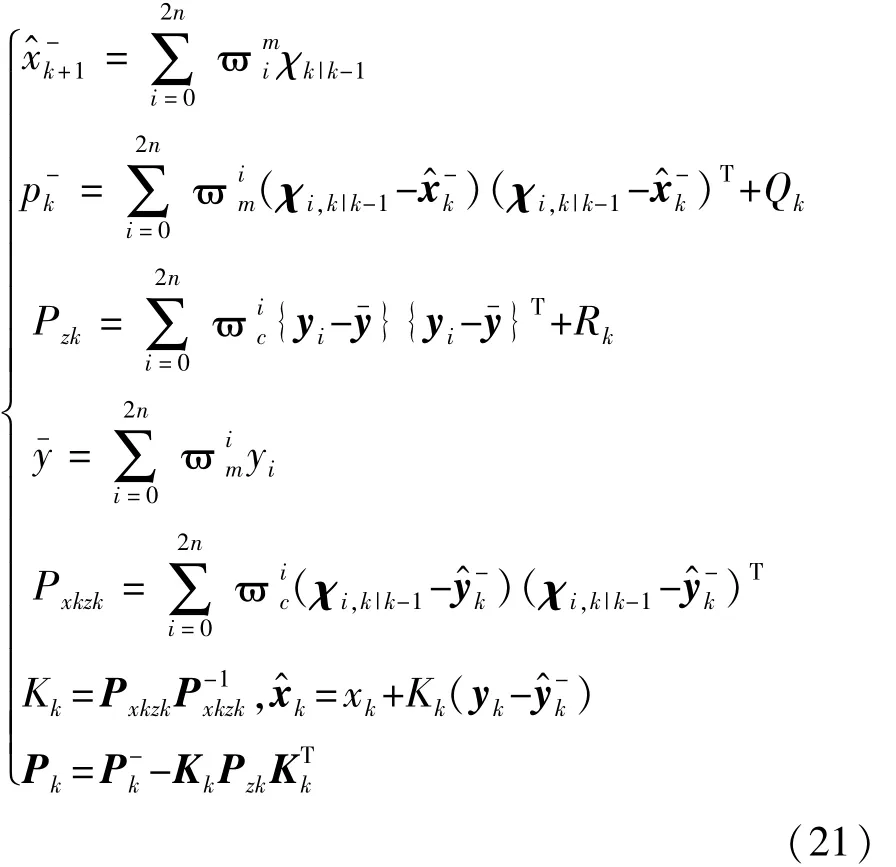
式中:Pk为估计误差方程矩阵;Kk为卡尔曼滤波增益。此处,结合式(20)与式(21)可知,UKF算法识别簧载质量流程框图,具体如图7所示。

图7 车辆簧载质量估计UKF算法流程框图
说明,此处路面过程噪声方差Q与系统测量噪声方差R可依据文献[3]获取。
3.2 整车侧倾状态T-S估计算法
利用T-S整车模型,此节设计了基于T-S模型的整车垂向与横向耦合的侧倾状态观测算法,具体描述如下:

其中

利用测量数据与式(22)可对侧倾状态(侧倾角与侧倾率)进行有效估计。
为进一步求解系统增益Li,系统误差定义如下:

对应的系统状态误差有

其中

若定义:

则对应的系统增广矩阵和系统估计误差可表示为
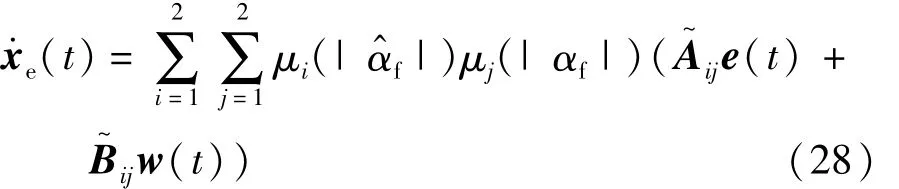
其中

说明,此处w(t)为系统干扰向量误差,如道路坡度、轮胎变刚度等,且被认为能量有界[3]。
其中,在考虑坡度对T-S观测算法影响的基础上,可利用最小误差增益的方法求解T-S观测器增益(Li),具体如下。
假设估计误差e(t)与干扰向量误差w(t)之间的最小误差增益L2具有如下性质:

通过定义L2最小上界,式(30)可表达为

推理1:若存在正定均匀矩阵P1、P2和Mj,则γ满足以下线性矩阵不等式(i=1,2)[12]:

其中
基于以上分析,可知 T-S观测器增益 Li=Pi-Mi,对应的T-S观测器稳定性证明可参见文献[12]。
4 仿真与验证
此部分主要由UKF&T-S算法对车辆垂向与横向耦合侧倾状态进行有效识别,且此处需要说明的是后续的仿真与验证均建立在轮胎未离地工况。
4.1 簧载质量参数识别
利用第3节所述UKF算法,车辆簧载质量可有效识别,结果如图8所示。图8说明不同簧载质量工况下,UKF算法均可较高精度识别系统簧载质量。
4.2 车辆侧倾耦合状态识别
为有效验证UKF&T-S算法识别车辆侧倾状态的有效性,此处利用商业化CarSimⒸ动力学软件对其结果进行验证[12],且选取软件中 SUV(D-Class)车型为例进行阐述,如图9所示。其中,车辆侧倾工况均在转向盘转角10°(J-turn工况),对车辆侧倾角与侧倾率进行的比较分析。需要说明的是,结合第2节的路面建模,此处选用80 km/h工况下ISO-A与ISO-C级路面进行仿真与验证。
基于以上分析,结合传统的T-S状态观测算法,对利用UKF&T-S算法获取的车辆垂向与横向耦合侧倾角与侧倾率进行了仿真验证,结果如图9~图11所示。
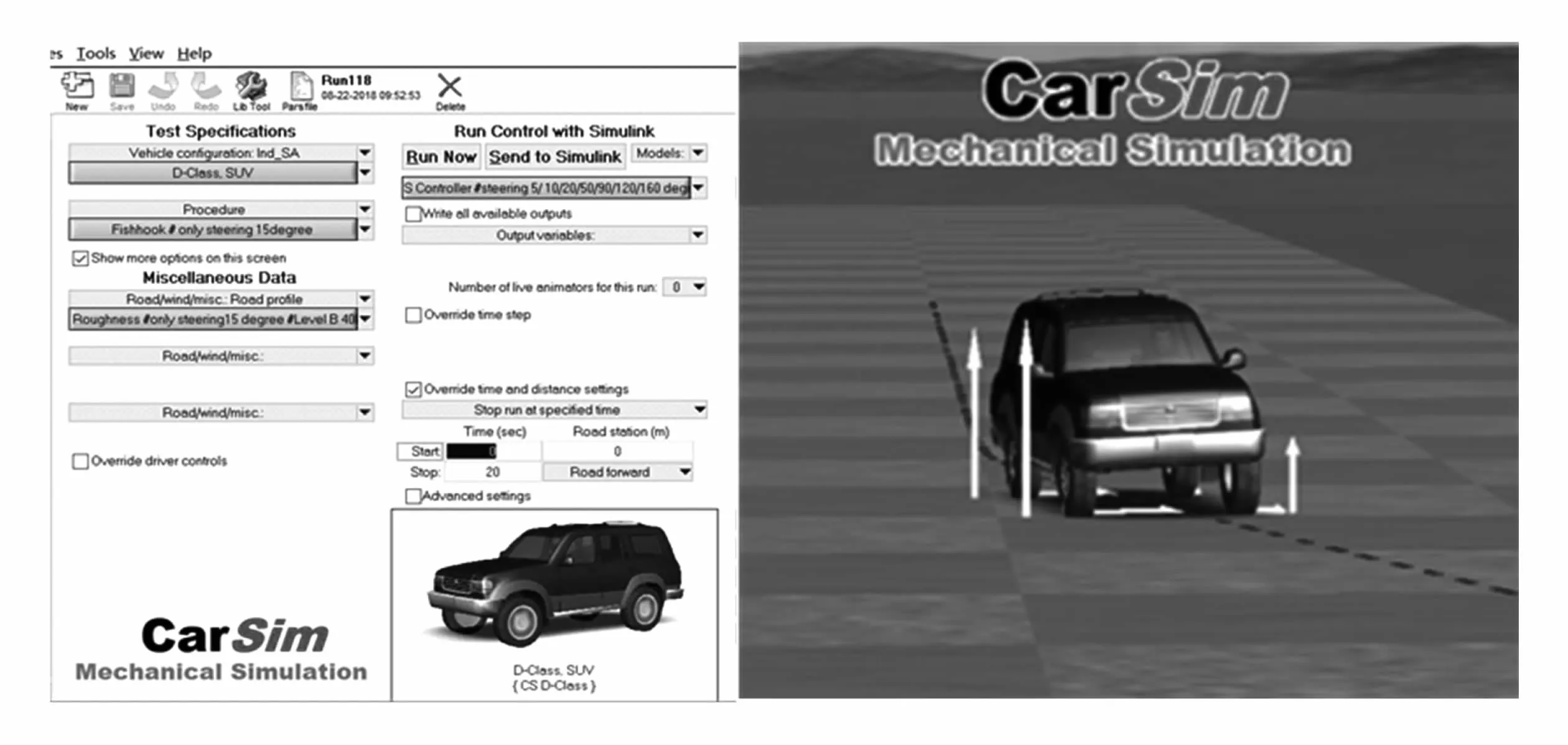
图9 标准ISO-A/C级路面且J-turn工况下CarSimⒸ软件侧倾行为仿真

图10 标准ISO-A级路面激励下车辆侧倾状态
由图10与图11可知,利用UKF&T-S观测器算法较T-S算法在车辆侧倾状态估计工况下可获取更高的估计精度。为进一步说明UKF&T-S算法的估计精度,此处采用与商业化CarSimⒸ动力学软件数据比较后的标准偏差值作为依据,对算法精度进行验证,具体结果如表 1所示。从表1中可知,UKF&T-S算法识别误差与CarSimⒸ仿真数据相比标准偏差不超过10%,有效验证了此算法的可靠性。
5 结论

图11 标准ISO-C级路面激励下车辆侧倾状态
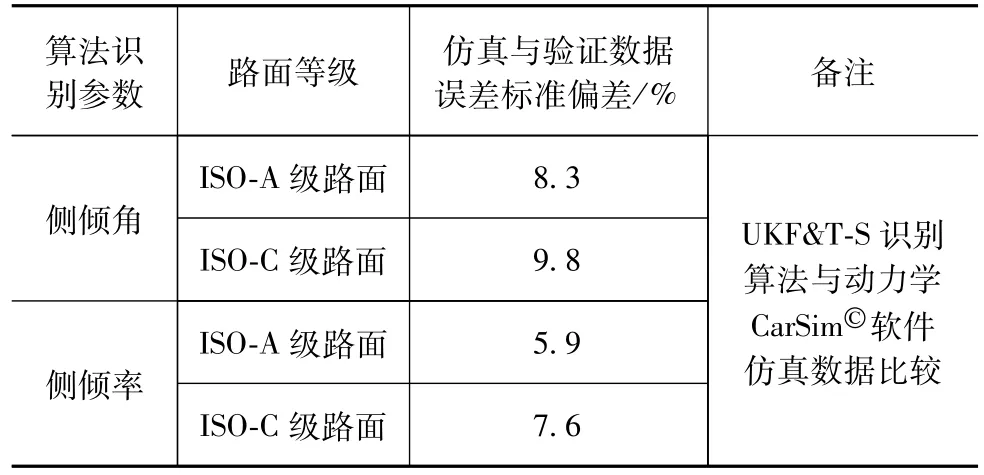
表1 ISO-A/C级路面(80 km/h)工况下UKF&T-S算法标准偏差比较
本文中提出了基于车辆耦合动力学模型的双非线性状态观测识别算法(UKF&T-S),验证了复杂行驶工况下UKF&T-S算法识别车辆侧倾运动状态的有效性,进而为车辆侧倾控制提供更加精确的状态输入,主要结论如下:
(1)建立复杂行驶工况下车辆垂向与横向耦合动力学模型,并利用UKF方法对车辆簧载质量进行实时观测;
(2)设计基于车辆耦合动力学模型与UKF方法的双非线性UKF&T-S算法,且对车辆侧倾状态进行有效识别;
(3)利用商用化CarSimⒸ动力学软件,通过在ISO-A/C级路面激励工况下T-S观测器车辆侧倾状态估计结果的对比,有效验证了UKF&T-S算法的有效性,且与CarSimⒸ仿真数据相比识别状态标准偏差不超过10%。
猜你喜欢
英语文摘(2022年9期)2022-10-26
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
火力与指挥控制(2022年6期)2022-07-25
计算机与数字工程(2022年4期)2022-05-10
黑龙江大学自然科学学报(2022年1期)2022-03-29
计算机仿真(2021年3期)2021-11-17
知识就是力量(2018年3期)2018-03-08
幼儿教育·父母孩子版(2017年12期)2018-02-28
科普童话·神秘大侦探(2017年3期)2017-03-16