制动工况下主动卷收器参数对乘员离位位移影响的分析*
2020-05-28 06:26胡远志朱鸿旭曾宪菁王振飞徐紫红蒋成约
汽车工程 2020年5期
胡远志,朱鸿旭,曾宪菁,王振飞,徐紫红,蒋成约
(1.重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆 400054; 2.泛亚汽车技术中心有限公司,上海 201201;3.天合汽车科技(上海)有限公司,上海 201814)
前言
碰撞事故发生前,汽车主动安全技术对车辆的接管和人为紧急操纵车辆会导致车速和乘员姿态的急剧改变,从而加重乘员的碰撞损伤[1-2]。当今,越来越多的专家学者通过实车测试和计算机仿真来探讨碰撞前阶段乘员姿态、肌肉支撑和乘员避险动作与损伤之间的关系,从而提升乘员约束系统的效率。研究结果表明,碰撞前制动阶段的乘员运动响应会加大乘员的损伤,尤其是乘员胸部和颈部位置的损伤更为显著[3-5]。针对这一问题,主被动一体化安全技术应运而生,并很快引起重视。主动控制卷收器(ACR)作为主被动一体化的安全装置,能有效地消除安全带佩戴间隙和织带松弛量,限制乘员离位位移,使乘员保持正常坐姿[6-8],并有效减小碰撞后乘员损伤,提高传统被动安全系统的效能[9-11]。
不同乘员在制动过程中身体各部位的肌肉反应及其持续时间存在差异,Olafsdottir和 Carlsson等[12-13]通过收集志愿者在制动阶段各部位的肌肉电信号来研究制动阶段乘员各部位的肌肉活动情况。结果表明,志愿者各部位肌肉的反应时间、激烈程度和持续时间均不相同,且下躯干各部位的激烈程度要明显高于上躯干。主动人体假人因其能模拟乘员各部位的肌肉张紧而被广泛用于碰撞前阶段的约束系统设计,为验证主动假人的工程适用性,Beeman和Östh等[14-15]仿真对比了预碰撞阶段和碰撞阶段主动人体假人各部位加速度和运动响应,指出主动人体假人具有较高的适用性,能很好地指导自动制动系统的设计开发。
上述研究的不足之处在于滑车试验难以模拟出真实的道路交通环境,且一些试验在试验前对志愿者进行培训并对肌肉张紧度提出要求(全身肌肉张紧或全身肌肉松驰),以致不能很好地再现乘员在实际行车过程中对车辆制动的真实反应。针对以上不足,本文中针对配备有ACR的车辆开展志愿者实车试验,并根据试验结果搭建仿真模型,同时采用主动人体假人模拟乘员的肌肉张紧度,在验证模型的有效性后,探究ACR的预紧力和预紧时间对乘员离位位移的影响。
1 志愿者实车试验
1.1 志愿者信息
为探究乘员在紧急制动工况下的离位情况和ACR的工作性能,对一名志愿者进行12次实车试验。志愿者身高175 cm,体质量75 kg,身体状况良好,没有颈椎和腰椎病史,且近期未服用可能导致增加损伤风险的药物。
为获得志愿者在制动阶段的真实反应情况,未对志愿者在制动阶段的肌肉张紧度提出任何要求。志愿者进行的12组试验均配备有ACR系统,如图1所示。为保证试验的一致性,志愿者最外层穿着棉制T恤,并对志愿者的初始姿态作统一规定。

图1 志愿者初始姿态
1.2 实车测试
实车试验的车型为国内某在研车型,车中原有卷收器替换为ACR。B柱下方放置加速度传感器来测量车体加速度,同时为分析ACR的工作性能,在肩带和腰带处各放置一个力传感器(F305-Z4944,测试范围1 kN)来检测安全带的受力情况,并在卷收器上方放置一个织带位移传感器(如图2(a)所示,测距范围±1.024 m)记录安全带的收进和拉出量。为测量乘员在试验中的离位位移,在座椅头枕下方放置一个位移传感器,如图2(b)所示,最大测距1.27 m,误差率0.25%,其与志愿者颈部相连,志愿者前方和侧方各放置一台摄像机,焦距1.96 mm,光圈 2.0,视场角 H112°V81.4°D122.4°,畸变小于-11.2%。双肩和手肘处贴上标签码,用于追踪乘员各部位的运动。
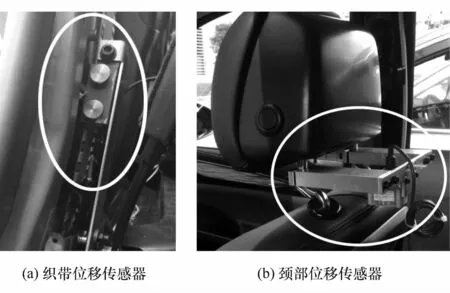
图2 传感器安装位置
为模拟紧急制动场景,要求驾驶员将车辆从静止逐渐加速到70 km/h,并保持一段时间的匀速状态。制动时,每次试验的制动模式(踩制动踏板的力和速度)保持一致,直至车辆制动停车,测试的减速度均为1g左右,整个测试过程不对志愿者做任何提示。同时要求志愿者在制动前身体保持自然放松,制动阶段,完全凭志愿者本能反应调节肌肉张紧度。每次试验间隔大约4 min。测试场地为专用测试场地,柏油路面,平整无坑洼。
2 仿真建模与验证
2.1 仿真模型的建立
利用多刚体动力学软件MADYMO建立乘员侧约束系统仿真模型,包括车身模块、座椅模块、安全带模块和假人模型,其中车身模块和座椅模块从试验车辆整车模型中提取。根据车型CAD数据对模型中卷收器、D环、Buckle和下固定点的位置进行调整。同时,为精确模拟ACR的预紧参数,对该产品开展3次静态触发试验,3次试验的ACR预紧力曲线如图3所示。试验曲线显示3次试验在稳定阶段的预紧力均为250 N左右。

图3 ACR模块试验曲线
生物仿真技术因其能很好地再现乘员在预碰撞阶段的运动学反应而被用来评估主动安全系统的性能,主动人体模型(active human model,AHM)就是其中的一种。由于制动阶段比碰撞工况持续时间长,乘员有足够的时间对突然的制动做出本能反应,因此为更好模拟试验中志愿者的离位情况,本文的假人模型采用AHM模型。资料显示,AHM假人身高1.76 m,体质量75.3 kg,与志愿者身材差异很小,最终约束系统模型如图4所示。
2.2 仿真模型的验证与AHM假人参数设置

图4 约束系统仿真模型
AHM假人的肌肉张紧度通过调节各部位的激活参数来控制,其中激活参数为0时代表该部位无主动动作,参数为1代表该部位肌肉张紧程度最大。一般来说,乘员在整个制动阶段自身肌肉的张紧程度并非是保持不变的,乘员在面对突来的制动时,通常会有一定的反应延迟,然后瞬间绷紧肌肉来反抗自身的运动趋势,随后逐渐放松直到制动结束。不同的志愿者对紧急制动的反应不同,所需的反应时间和肌肉张紧程度也不同,同时,在进行多次试验后,志愿者对制动的反应进入疲劳期,反应时间和肌肉张紧度也会有变化。且相比碰撞工况,制动工况中安全带力的量级本身较小,因此AHM激活参数的设置尤为重要。本文通过试验视频、试验曲线和对志愿者的现场询问,不断优化AHM的参数设置,从而保证模型的精确度。
视频资料显示,志愿者在整个试验中头部始终保持直立,未发生明显转动,模型中将AHM头部参考定义值设为0,即头部与参考空间保持直立。同时,志愿者肩部也未发生明显偏转,可推测志愿者肩部始终保持高度张紧状态,结合仿真情况,当肩部激活参数设置为1时,仿真假人肩部运动和试验较为一致。乘员其他部位激活参数结合安全带力、织带位移量和乘员离位距离不断调整、优化,最终假人其余关键部位的激活参数函数如图5所示。
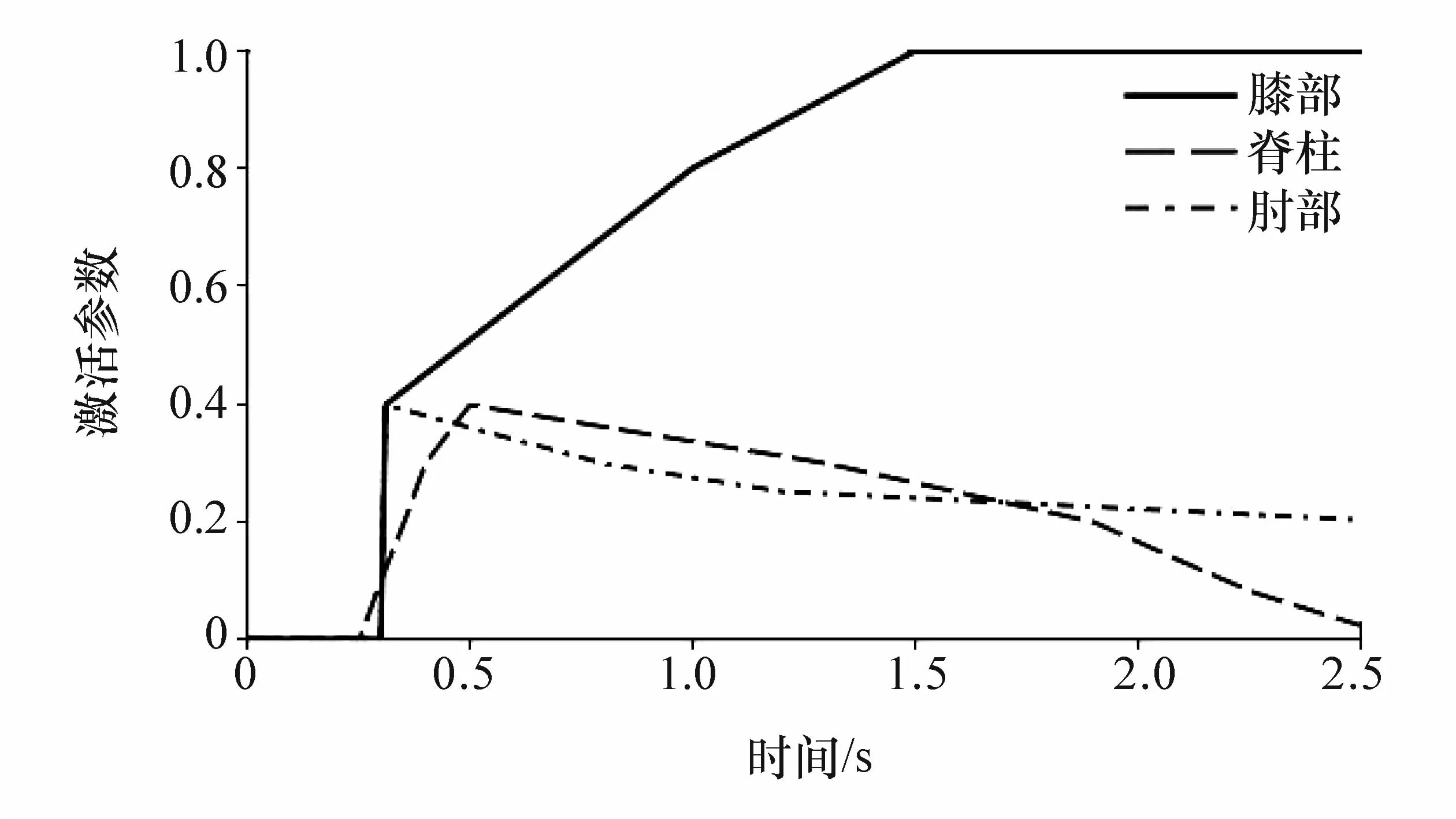
图5 仿真中不同区域激活参数的设定
图6 为肩带力、腰带力、颈部离位位移和织带位移量的试验与仿真结果对标图。由图可见,肩带力、颈部离位位移和织带位移对标情况较好,腰带力误差率略大,但在接受范围之内,模型整体对标情况较好,可用于后续研究。
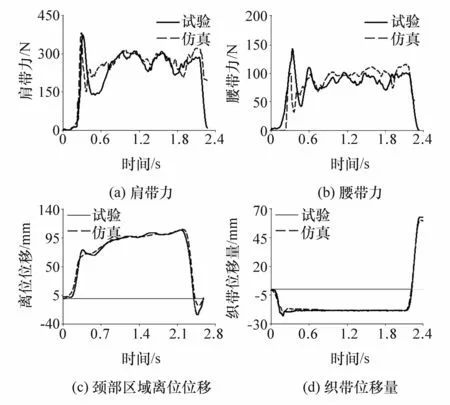
图6 模型对标结果
3 ACR参数优化分析
3.1 试验设计与响应面建立
ACR的工作性能受诸多参数的影响,其中预紧力和预紧时间对其影响最为显著,属于高灵敏度参数,且可控性高,成本较低,因此选取预紧时间和预紧力作为本次优化的设计变量。
主动安全带的预紧时间分为两类,即制动前预紧和制动后预紧,对于驾驶风格较为激进的驾驶员,由于跟车较近,制动前的预紧时间过早可能会导致预紧频繁而使乘员感到不适,因此制动前的预紧时间不宜选取过长。国内外同类产品的预紧时间多在制动前 100~200 ms之间[12,15],而预紧力的分布范围较广。综合考虑后,以200 ms作为制动时刻,ACR预紧时间(TTF)和预紧力(Force)的取值范围如表1所示。由于ACR对乘员头部和第一胸椎(T1)部位的约束效果较为明显,因此选头部和T1部位的离位位移作为本次的优化目标。

表1 设计变量及其变化范围
设计变量及其范围确定后,采用最优拉丁超立方试验设计对设计变量进行取样,共抽取12组试验并利用MADYMO进行仿真得到优化目标的响应值,并采用Kriging近似模型对两个优化目标建立响应面,进行近似精度检验,验证了Kriging近似模型具有较高的拟合精度。
图7分别为头部、T1部位位移与预紧时间和预紧力的响应曲面图。由图可知,预紧力越大,头部质心(HCG)和T1位移量越小,近似呈负相关。单从预紧时间来看,对于同一级别的预紧力,预紧时间从200 ms(即开始制动时刻)到400 ms,即制动后触发ACR时,乘员头部和T1部位的位移量上升趋势较为明显,近似呈正相关;而从0到200 ms,即制动前触发ACR时,乘员两个部位的位移量近似呈水平,只是随着预紧力的加大略有增加。这是因为对于制动前预紧,无论预紧时间提前多少,乘员均处于正常坐姿。从开始预紧到制动这段时间,预紧时间的变化对乘员的约束效果差异较小,且由于将乘员向后拉回时与座椅接触后发生反弹,造成乘员有一定的前倾,并随着预紧力的增大和预紧时间的提前,该现象越明显,这些响应关系与实际相吻合,初步验证了近似模型的准确度。

图7 Kriging近似模型
3.2 基于NSGA-Ⅱ的仿真优化
本次优化采用第二代非劣排序遗传算法NSGA-Ⅱ对头部和T1位移量两个目标值进行优化。计算得到最优解的预紧时间和预紧力分别为145 ms和500 N,预测头部和T1位移为81.66和26.84 mm。将最优解代入MADYMO中计算得到头部质心和T1位移为84.1和26.58 mm。Kriging近似模型预测值与仿真结果误差仅为3.0%和0.98%,证实了优化结果的有效性。
为分析优化后的ACR对乘员离位位移的改善效果,对优化前后的模型进行仿真对比,优化前模型的预紧时间和预紧力分别为400 ms和250 N。仿真得到优化前后的乘员各部位位移量,如表2所示。可以看出,优化后乘员头部质心和T1部位的位移量改善效果明显,分别减小了55%和73.44%。优化前后的假人最大位移如图8所示,浅灰色假人代表优化后的乘员最大位移处的姿态。

表2 优化结果对比

图8 优化前后乘员姿态
图9 为优化前后肩带力的对比。由图可见,由于预紧力的增加,优化后的肩带力增加较大,且ACR在145 ms开始预紧时,肩带力达到了600 N左右,大大超过500 N的预紧力,并随着预紧时间的提前,该峰值逐渐上升,原因之一是乘员被向后拉回时与座椅接触而发生反弹,从侧面证实了近似模型的准确性。

图9 优化前后肩带力对比
图10 为回弹阶段优化前后的头部加速度对比。由图可见,优化前的头部回弹加速度峰值为65 m/s2,优化后的头部回弹加速度降至37 m/s2,降幅为43.08%。优化后的乘员离位位移较小,因此回弹阶段各部位的最大加速度也相对较小,如果在制动阶段发生追尾碰撞,乘员的挥鞭伤害也会大大降低。

图10 优化前后回弹阶段AHM头部加速度对比
由于优化后的预紧力比优化前的预紧力增加较大,故对假人胸部的约束也会增强,为探究优化前后的ACR预紧参数对正面碰撞工况中乘员胸部损伤的影响,在制动脉冲后面添加某车型的50 km/h正撞加速度脉冲,仿真对比优化前后的胸部损伤。结果显示,制动阶段优化前后的胸部最大压缩量分别为2.2和3.7 mm,碰撞阶段优化前后的胸部最大压缩量分别为51.6和45.5 mm,主要原因是由于优化后的预紧力较大,故在制动阶段假人胸部压缩量比优化前要大;但优化后的乘员离位位移较小,使乘员前移空间相对较大且可避免与气囊的过早接触,因此,优化方案可改善该车型正撞时的假人胸部压缩量。
4 结论
制动工况中,乘员自身的肌肉张紧度会直接影响到乘员姿态的改变,且乘员在整个制动过程中的肌肉张紧度也是变化的,为使仿真模型更加接近于真实工况,本文中利用ACR实车测试结果指导仿真建模,并利用AHM生物仿真人体模型来模拟乘员的肌肉张紧度。经过仿真结果与试验数据的对比,验证仿真模型的精确度较高。以此模型来探究预紧力和预紧时间对乘员离位位移的影响,并针对头部和T1部位位移量进行优化。结果表明,预紧力和乘员离位位移呈负相关趋势,且对于同一预紧力,预紧时间的变化对制动后触发ACR的乘员离位影响较大,对制动前触发的情况影响较小。
猜你喜欢
汽车零部件(2021年9期)2021-09-29
北京汽车(2021年3期)2021-07-17
汽车与驾驶维修(维修版)(2021年2期)2021-04-07
汽车工程(2021年12期)2021-03-08
数学大王·低年级(2020年4期)2020-04-20
时代汽车(2020年23期)2020-03-03
世界汽车(2019年6期)2019-06-20
发明与创新·大科技(2017年9期)2017-09-14
科技创新与应用(2017年23期)2017-09-01
汽车工程学报(2016年6期)2017-01-11