
光伏系统自适应光照和局部遮光的MPPT跟踪
2020-05-27 06:57全少理朴哲勇陈鹏浩王静孙义豪刘文霞李海燕杨艳会富梦迪
哈尔滨理工大学学报 2020年6期
全少理 朴哲勇 陈鹏浩 王静 孙义豪 刘文霞 李海燕 杨艳会 富梦迪
摘 要:为了解决当前各类算法对光照强度快速变化和光伏系统局部遮光时最大功率点的跟踪不准确的问题,提出了一种全新的、高性能跟踪方法。首先,对所提方法的跟踪原理进行了分析,从模型结构、扫描过程、占空比计算、触发条件等方面展开了论述,从理论上分析了所提出的方法能准确跟踪全局的最大值;其次,利用仿真软件将提出的跟踪方法与现阶段应用较为成熟的扰动观测法、电导增量法两种方法进行了对比,对光照强度快速变化、局部遮光两种工况进行了仿真,仿真结果表明此方法明显优于另外两种方法;最后,搭建了试验平台,开展光照强度快速变化、局部遮光时系统最大功率点跟踪试验,试验结果再次证实本文提出的方法在跟踪时间和跟踪效率上均优于另外两种方法。
关键词:最大功率点跟踪;光电板特性;局部遮光;跟蹤效率
DOI:10.15938/j.jhust.2020.06.008
中图分类号: TM615
文献标志码: A
文章编号: 1007-2683(2020)06-0053-10
MPPT Tracking of Adaptive Lighting and Partial
Shading in Photovoltaic Systems
QUAN Shao-li1, PIAO Zhe-yong3, CHEN Peng-hao4, WANG Jing2, SUN Yi-hao1,
LIU Wen-xia2, LI Hai-yan3, YANG Yan-hui2, FU Meng-di2
(1.State Grid Henan Electric Power Company Economic and Technical Research Institute, Zhengzhou 450052, China;
2.State Key Laboratory of New Energy Power System, North China Electric Power University, Beijing 102206, China;
3.State Grid Jilin Electric Power Co., Ltd., Changchun 132000, China;
4.State Grid Henan Electric Power Company, Zhengzhou 450000, China)
Abstract:In order to solve the problem of inaccurate tracking of the maximum power point of the current various algorithms for rapid changes in light intensity and partial shading of the photovoltaic system, a new and high-performance tracking method was proposed. Firstly, the tracking principle of the proposed method was analyzed, and the discussion was carried out from the aspects of model structure, scanning process, duty cycle calculation, trigger conditions, etc., and theoretically analyzed that the proposed method can accurately track the global maximum value. Secondly, using simulation software, the proposed tracking method was compared with the current application of the more mature disturbance observation method and the conductance increment method. The two conditions of rapid light intensity change and partial shading were simulated, and the simulation results shows that this method is significantly better than the other two methods. Finally, a test platform was built to carry out the tracking test of the maximum power point of the system when the light intensity changes rapidly and partial shading. The test results again confirmed that the method proposed in this paper is both in tracking time and tracking efficiency. Better than the other two methods.
Keywords:maximum power point tracking; photovoltaic panel characteristics; partial shading; tracking efficiency
0 引 言
近些年光伏发电量在不断增加,从2017年的131GW增长到2018年的176.1GW,预计2030年前,光伏发电总量将占总发电量的10%[1]。目前,影响光伏发电技术的推广的主要问题在于其安装成本高、电能转换效率低;但是,随着光伏面板制造技术的改进和光伏物理技术的进步,光伏发电系统的安装成本正在迅速下降,而目前商用太阳能电池板的最高转换效率约为14~19%[2]。因此,可通过动态跟踪各种工况下的最大功率点来提高光伏面板的利用效率,将能有效增加光伏发电量。
针对最大功率点的跟踪(MPPT)已经有很多相应的算法,Esram等将已知方法进行了对比。目前最广泛使用的方法是扰动观测法(P&O)和电导增量(INC)算法,能适应光照强度和温度稳定或缓慢变化时的最大功率点跟踪[1-3]。但是这些算法也存在一个致命缺点是,当光照或者温度出现多个峰值时,那么系统将在最大功率点附近振荡,甚至局部遮光时算法失效并且在局部阴影条件下失败[4-8]。与P&O相比,INC方法较为复杂,但可提供更稳定的MPPT[9]。只要ΔP/ΔV能准确地测量出距离最大功率点的距离,这个算法就能实现准确跟踪;这种方法只适用于光照强度缓慢变化的情况。每种算法均要在最大功率点的跟踪精度以及跟踪速度之间寻求平衡,因此有学者对这些算法进行了改进[10-14]。基于光伏组件最大功率点(MPP)轨迹特征和单参数控制算法在不同角度对传统的MPPT方法进行了改进,取得了明显效果,但是这几种方法的实现难度较大[1,15-17]。此外其他广泛使用的MPPT技术有恒压(CV)和恒流(CC)最大功率点跟踪,MPCC和MPCV分别与短路电流和短路电压呈线性关系,这两种办法虽然跟踪方法较快但是追踪精确度不足[18]。在城区使用光伏系统时极易出现遮阳问题,极大地降低光伏系统的输出功率。光伏系统也极易接收不均匀光照,此时不同的光伏面板出现多峰值P-V曲线[19]。
针对上面分析的最大功率点跟踪算法存在问题,文章提出了一种新的方法克服了上述存在的问题。根据本文算法的拓扑结构,分析了跟踪过程中的扫描原理、占空比计算方法、触发跟踪的设置。基于此在仿真软件中构建了仿真模型,对比本文的算法与扰动观测法、电导增量法的跟踪效果
1 算法原理分析
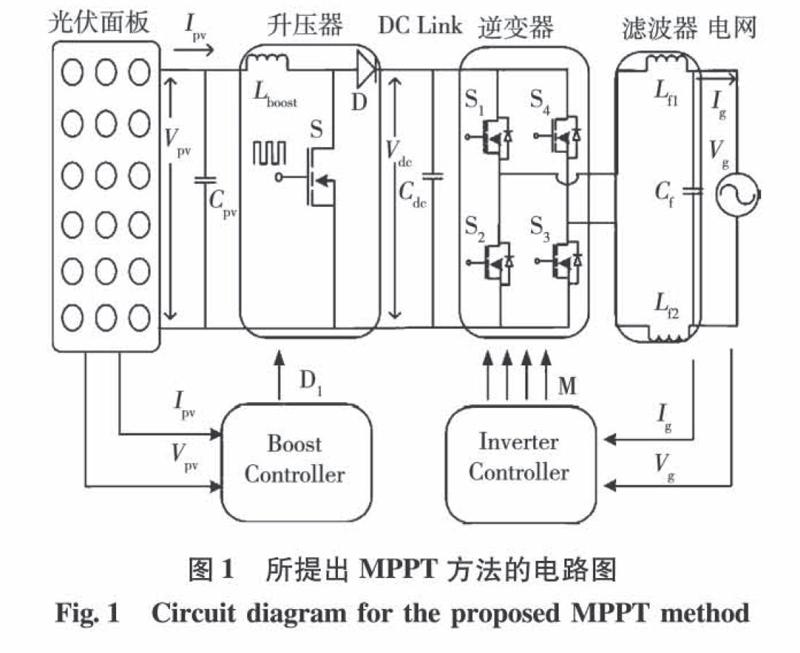
本文提出的MPPT算法基于两级拓扑结构。图1展示了500W光伏板系统的电路图,与单级拓扑相比,带有附加升压转换器跟踪MPP的两级拓扑具有较好的直流电压稳定性和较低的交流侧电压总谐波失真(THD)。在本节设计的控制器中使用了单步电压调节技术,由一个普通的比例积分(PI)元件组成,产生一个电压基准到升压变换器的脉宽调制信号。当光伏板通过开关S短路时,面板Vpv的电压下降到0V,电流Ipv上升到短路电流Isc。电压Vpv下降0V和电流Ipv升高Isc所用的时间取决于系统电阻的变化,这是由于短路电流回路中存在滤波电容Cpv和升压电感Lboost,这一整个过程称之为扫描过程。该控制器利用扫描来跟踪光伏系统在各种运行条件下的最大功率和相应的电压。
1.1 扫描过程
在任何给定的工作条件下(Vpv>0),通过闭合升压转换器的开关S,将占空比(D1)设置为1来执行扫描过程。此时,PV面板的电流Ipv路径短路,因此面板电压Vpv趋于0V,电流Ipv上升至短路值IscA。但电感器Lboost不允许电流突然变化、电容器Cpv不允许电压突然变化,导致这一过程不会瞬间完成。对于任何光伏面板而言,电压下降和电流上升所需时间通常为毫秒级别[21]。在该扫描期间,测量电压Vpv和电流Ipv,并通过将这两个值做乘法运算获得相应的功率Ppv。通过对Ppv信号利用峰值检测器获得扫描期间的功率Pmpp的最大值,并通过触发采样保持电路获得Pmpp对应的电压Vmpp。在扫描光伏面板过程中,开关S保持闭合状态,直到面板Vpv的电压达到Vsc极限为止,该极限指示PV曲线的扫描并在出现多个峰值的阴影情况下提取全局MPP[22]。扫描过程的框图如图2所示。
所研究的光伏板有216个电池串联,其中一个旁路二极管模块中含有72个串联的光伏电池,这意味着光伏模块中有3个旁路二极管模。因此,在局部遮光条件下,光伏组件最多可产生3个MPP,包括局部最大值和全局最大值。每个旁路二极管的开路电压Voc为43.3V,是光伏组件开路电压的三分之一。在局部遮光条件下,MPP始终接近0.8Voc。因此,扫描电压限制在0.4Voc,即18V,以确保扫描所有的局部最大值。将面板电压Vpv限制为18V,限制面板电流Ipv为光伏板的短路電流Isc。
1.2 占空比计算
一旦面板Vpv的电压达到18V的Vsc极限,扫描过程中获得的最大功率点跟踪电压Vmpp将作为参考电压。Vmpp参考电压和Vpv面板电压之间的误差信号通过P–I控制器控制,并生成相应的占空比D1,将升压转换器占空比更新为新的D1[20]。图3展示了对应于100kHz开关频率操作的升压转换器的占空比D1的计算的框图。
1.3 改变操作条件的触发器设置
一旦PCU更新了与新的最大功率点相对应的升压转换器D1的占空比,升压转换器就会以连续电流模式(CCM)运行,直到启动下一个扫描周期。为了触发扫描过程以适应太阳光照强度、负载和环境等工作条件的变化,设置了电流触发Itrig,其与Impp对应,如等式(2)所示。
Impp=pmppVmpp(1)
Itrig=Impp(1-D1)(2)
Iout=Ipv(1-D1)(3)
PI控制器设置为Vmpp,直到Itrig等于PCU的Iout输出电流。该条件确保在面板电压Vpv达到MPP电压Vmpp之前,控制器在扫描过程中不会对操作条件的变化做出响应。一旦面板电压Vpv达到MPP电压Vmpp,触发电流Itrig等于PCU的输出电流。
Itrig=Iout(4)
将升压转换器的输出电流Iout与Itrig以及正常日照条件下Impp的5%阈值0.2A进行不断比较,以感测日照、负载和环境条件的变化,即
Iout=Itrig±0.2(5)
当输出电流Iout变化并满足式(5)时,控制器控制电压Vpv和电流Ipv的变化方向。变化方向决定了Iout变化的原因是由于负载变化或环境条件变化:
ΔI=Impp-Ipv(6)
ΔV=Vmpp-Vpv(7)
如图4所示,日照条件发生变化,0.9Sun日照条件(本文以光伏面板所能接收到最大的光照强度为1Sun)下的电压、电流分别为Vmpp、Impp。当光照条件发生变化,工作点从a移动到b或c。在1.0Sun的工作点b,电压和电流都增加(ΔV>0,ΔI>0);在1.0Sun的工作点c,电压和电流都降低了(ΔV<0,ΔI<0)。如果在0.9Sun下运行时负载条件发生变化,则新的工作点将位于d或e位置,具体取决于负载变化的方向。工作点d时,工作电压升高,电流减小(ΔV>0,ΔI<0);在工作点e时,电流增加(ΔV<0,ΔI>0)。因此,当光照条件发生变化时,电压Vpv和电流Ipv的变化方向是相同的;当负载条件发生变化时,电压Vpv和电流Ipv的变化方向是相反的。对于任何负载,均使工作电压Vpv保持在相同的Vmpp下运行,无需对光伏面板启动进行扫描;对于满足等式(5)的日照条件变化,则控制器扫描新Vmpp的P-V曲线。当外界条件改变触发扫描程序时,控制器感应到新的工作点并扫描整个曲线。新的工作电压将始终大于式(8)中所示的最大功率点电压Vmpp:
Vmpp=(0.8~0.92)Vpv(8)
因此,利用新的工作电压Vpv扫描曲线可以确保Vmpp的精确跟踪。图5为整个过程的流程图。通过扫描从面板电压Vpv到短路电压Vsc的整个PV曲线,该算法对引起多个峰值的阴影效应保持免疫,故可使功率Pmpp对应于光伏面板的全局最大值,而不是由于阴影导致的局部最大值。
2.4 系统部分参数确定
DC-DC转换器的损耗(如开关损耗,传导损耗,反向恢复损耗和铜损耗)不会影响与最大功率Pmpp相对应的Vmpp。扫描期间关键作用的损耗是开关S两端的电压降落,这是由于内部电阻Rint在15ms内约为0.01Ω,如式(10)所示。在扫描过程中,开关S在短路电压Vsc设置为18V的情况下闭合,即使在最低的日照条件下,Vmpp也为45V,因此将扫描电压限制为18V不会冒丢失Vmpp的风险,并且还减少了电源开关上的dV/dt和dI/dt效应。在PCUIout的输出端设置触发阈值为0.2A,因此面板电流Ipv的任何细微变化都会反映在Iout,从而启动扫描过程。
Vmpp=Vpp-Vdrop(9)
Vdrop=IscRint(10)
由于直流电容Cdc的存在,扫描过程中的尖峰电压不会影响升压转换器的负载或输出功率。由于任何光伏模块的扫描时间均为毫秒级别,在整个扫描过程中可根据式(11)设计电容器Cdc用于升压操作。此外,在逆变器控制的作用下,滤除尖峰并保持直流母线电压恒定。
Cdc(min)=Iout(max)D1fsVout(11)
式中:Iout(max)为光伏组件的最大输出电流;ΔVout为输出电压中可接受的纹波;fs为最小扫描频率。计算逆变器调制指数M,使升压电容器直流侧的参考直流母线电压保持在180V,开关频率为10kHz。
2 仿真分析
首先在仿真平台中建立了等效PV模型进行仿真,假定温度保持在25℃恒定时,考虑到辐照度变化的光伏板特性变化如图6所示。表1给出了所研究太阳能电池板的规格,表2给出了系统中功率转换器的规格。
利用仿真软件对图1所示的系统进行仿真,仿真时对比了不同的MPPT方法:扰动观测、电导增量和所提出的扫描方法,在光照强度阶跃变化下的跟踪和局部遮光条件下的跟踪进行系统仿真。
2.1 光照条件阶跃变化
首先,系统处于0.5Sun条件下,然后将光照强度在0.15s时增加到1.0Sun(阶跃变化)。
2.1.1 扰动观测法(P&O)
扰动观测法的MPPT控制系统仿真结果如图7(a)所示。从光伏板电压、电流和功率的仿真结果可以看出,此方法可感知到了光照强度的变化,并做出了相应的响应。在此太阳光照条件下光伏系统的最大功率为484.0W,在给定的工作条件下,此方法所需调整时间为0.05s。
2.1.2 电导增量法(INC)
采用电导增量法进行MPPT的系统仿真结果如图7(b)所示。从光伏板电压、电流和功率图的仿真结果可以看出,此方法可感知到了辐照的变化,可做出了相应的响应。在此太阳光照条件下光伏系统的最大功率为486.0W。在给定的工作条件下,此方法所需的时间为0.04s。
2.1.3 本文提出的方法
使用本文所提出的扫描MPPT方法的系统仿真结果如图7(c)所示。从光伏板电压、电流和功率图的仿真结果可以看出,此方法可感知到了辐照的变化,并做出了相应的响应。在此太阳光照条件下光伏系统的最大功率为496.0W。在给定条件下,此方法所需的时间为0.005s。
对比以上3种方法的仿真结果,3种控制方法都能在1.0Sun光照条件下达到接近500W的最大功率,但本文所提出的方法能夠在最短时间0.005s内达到最大的功率496.0W,且系统达到稳定时,MPP周围没有振荡。
2.2 系统存在局部遮光
系统受到如图8所示的局部遮光条件的影响。同样将3种MPPT控制方法用于检测峰值功率,并提取出峰值功率。
2.2.1 扰动观测法(P&O)
扰动观测法进行MPPT的系统仿真结果如图9(a)所示。从仿真结果可以看出,该控制方法通过调整占空比可获得局部最大值260.0W。
2.2.2 电导增量法(INC)
电导增量法进行MPPT的系统仿真结果如图9(b)所示。从仿真结果可以看出,该控制方法通过调整占空比可获得局部最大值262.0W。
2.2.3 本文提出的方法
所提出的扫描MPPT方法的系统仿真结果如图9(c)所示。从仿真结果可以看出,该控制方法通过调整占空比可获得局部最大值330.0W。
通过上述仿真结果可知,与P&O和INC控制方法相比,本文所提出的控制方法所获得的最大功率更高且在最大功率点附近无振荡;且本文跟踪到的最大功率330.0W对应于全局最大值,而P&O和INC方法获得的260.0W功率对应于局部最大值,证明这两种控制方法在局部遮光条件下失效而本文提出法的方法则能有效跟踪到最大功率。
3 实验验证
为了验证所提出的MPPT方法,搭建了如图10所示的实验装置。该装置包括安捷伦E4362A太阳能模拟器、DC-DC数字控制器、DC–AC转换器以及示波器、负载和一台个人计算机。
将面板Vpv的电压调整为计算出的最大功率点参考电压,分别使用本文提出的扫描算法、P&O和INC算法进行实验研究。
3.1 太阳光照阶跃变化
验证算法的响应时间和效率:
1)使系统是在0.5Sun条件下运行的,未进行MPPT控制,随后在仿真实验开始后25s(5s/div)加入MPPT控制器,检查控制器跟踪MPP所用的时间;
2)将太阳光照条件从0.5Sun到1.0Sun来测试跟踪效率。
3.1.1 扰动观测法(P& O)
从图11可以看出,此跟踪方法能够适应运行条件的变化,将光伏板电压Vpv调整为Vmpp,并根据功率的计算公式获得相应的Pmpp。从图11(a)可以看到控制跟踪MPP方法所用的时间是15s(图11及以后的仿真图中横坐标均为时间,每格代表5s),图11(b)显示利用此方法能够在1.0Sun条件下跟踪得到的最高MPP达到485.36W。
3.1.2 电导增量法(INC)
从图12可以看出,使用电导增量法可实现MTTP的跟踪,能够适应运行条件的变化,将光伏板电压Vpv调整为Vmpp,并获得相应的Pmpp。从图12(a)中可以看到控制跟踪MPP方法所用的时间是12s,图12(b)利用此方法能够在1.0Sun条件下跟踪得到的最高MPP达到488.65W。
3.1.3 本文提出的方法
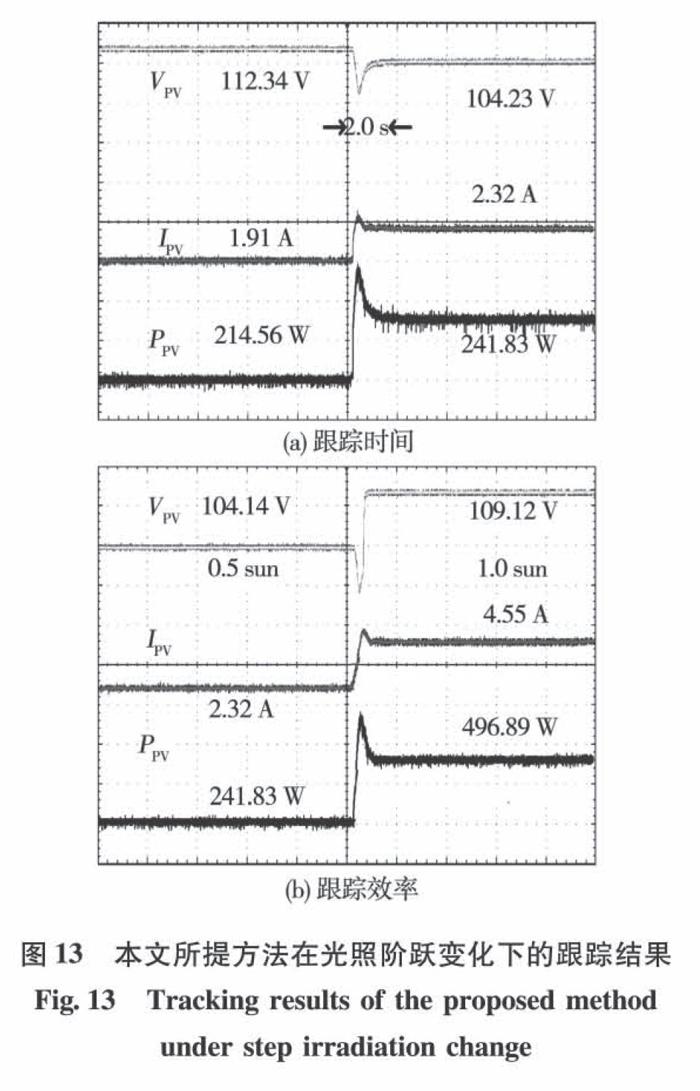
从图13可以看出,使用本文提出的跟踪方法也能适应光照条件的变化,将光伏板电压Vpv调整为Vmpp,并获得相应的Pmpp。从图13(a)中可以看出,所提出的控制跟踪MPP方法所用的时间是2.0s,图13(b)利用此方法能够在1.0Sun条件下跟踪得到的最高MPP达到496.89W。
P&O跟踪方法可以获得MPP电压为108.34V,产生的功率为485.36W;INC跟踪方法可以获得MPP电压为108.83V,对应的功率为488.65W。相比这这三个跟踪方法,本文所提出的跟踪方法可以获得MPP电压为109.12V,对应输出的功率为496.89W,并且在稳态MPP周围无振荡,MPP跟踪时间最短为2.0s,凸显出本文所提方法的优越性。
3.2 系统存在局部遮光
为了验证本文所提方法在多个峰值下的有效性,并网光伏系统受到如图8所示的局部遮阳条件的影响。
系统在1.0Sun条件下使用MTTP控制跟踪运行,然后在运行25s(5s/div)后,系统突然处于局部遮光状态。使用三种最大功率点跟踪方法检测峰值功率,以使工作点与最大功率点相匹配。
3.2.1 扰动观测法(P& O)
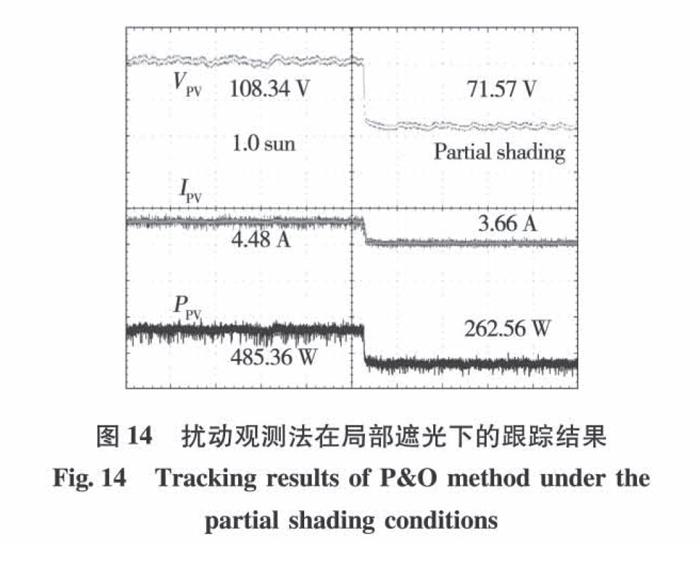
使用扰动观测法进行MPPT跟踪结果如图14所示。从结果中可以看出,获得局部最大值为262.56W。
3.2.2 电导增量法(INC)
图15显示了电导增量法的MPPT跟踪结果。从结果中可以看出,获得局部最大值为263.14W。
3.2.3 本文提出的方法
本文所提出的MPPT跟蹤结果如图16所示。从结果可以看出,获得全局最大值为329.83W。
从结果可以清楚地看出,与P& O和INC相比,本文所提出的跟踪方法所获得的MPP功率更高且无振荡,且所获得的329.83W对应于全局最大值。而P& O和INC所获得的功率分别仅为262.56W和263.14W,也即在系统存在局部遮光条件下这两种办法仅能获得局部极大值,无法获得全局最大值。
5 结 论
本文基于对目前MPPT方法进行分析,提出了一种可适应光照条件快速变化和局部遮光条件下光伏系统的动态MPPT控制方法,该方法使用扫描程序来跟踪、检测光伏面板在特定操作条件下所能提供的最大功率。将本文提出的方法分别于P&O和INC控制跟踪方法进行仿真、实验对比,得出以下结论:
1)使用仿真软件分别进行系统在光照强度阶跃变化、系统局部遮光条件下最大功率点的跟踪,结果表明本文所提出的方法能在最短时间内实现最大功率点的跟踪,且获得的MPP是全局最大值而不是局部的最大值;
2)通过搭建实验平台,在光照强度阶跃变化、系统局部遮光条件进行实验,相比P&O和INC方法,本文所提出的方法能在2s内实现MPP跟踪,且跟踪的到的功率值最大;在系统存在局部遮光时,所获得的的最大功率也是全局的最大值,从而实现了有效的MPPT控制。
通过仿真、试验均验证了本文提出的算法可对光照强度阶跃变化、系统局部遮光条件下MPPT的控制,但是未能研究局部遮光比例对此算法的影响,也即未能获得此算法对于局部遮光的比例上、下限进行研究,因此后续将对此算法进行深入研究。
参考文献:
[1] 叶国敏,肖文波,李军华,等.遮荫条件下光伏发电最大功率的智能跟踪方法综述[J].南昌航空大学学报(自然科学版),2020,34(2):36.
YE Guomin, XIAO Wenbo, LI Junhua ,et al. Review of Maximum Power Tracking Methods for Photovoltaic Power Generation Under Shading Conditions [J] Journal of Nanchang Hangkong University(Natural Sciences),2020,34(2):36.
[2] 梁国壮,赵博,田涵雷,等.扰动-模糊结合的双模式MPPT算法研究[J].现代电子技术,2020,43(16):131.
LIANG Guozhuang, ZHAO Bo, TIAN Hanlei, et al. Research on Two-mode MPPT Algorithms Combining Perturbation Observation Method and Fuzzy Control [J]. Modern Electronics Technique, 2020,43(16):131.
[3] 黎家成. 阴影光照下光伏发电系统最大功率点跟踪控制研究[D].武汉:湖北工业大学,2019.
[4] 邓云.一种基于光强的光伏发电自动跟踪控制装置的研究[J].自动化应用,2020(7):99.
DENG Yun. Research on an Automatic Tracking Control Device for Photovoltaic Power Generation Based on Light Intensity[J]Automation Application,2020(7):99.
[5] CHAO K H . An Extension Theory-based Maximum Power Tracker Using a Particle Swarm Optimization Algorithm[J]. Energy Conversion & Management, 2014, 86(10):435.
[6] LIU F, DUAN S, LIU B, et al. A Variable Step Size INC MPPT Method for PV Systems[J]. IEEE Transactions on Industrial Electronics, 2008, 55(7):2622.
[7] LIU Y H, LIU C L, HUANG J W, et al. Neural-network-based Maximum Power Point Tracking Methods for Photovoltaic Systems Operating Under Fast Changing Environments[J]. Solar Energy, 2013, 89(3):42.
[8] 王志豪,李自成,王后能,等.基于RBF神經网络的光伏系统MPPT研究[J].电力系统保护与控制,2020,48(6):85.
WANG Zhihao, LI Zicheng, WANG Houneng, et al. MPPT Study of Solar PV Power System Based on RBF Neural Network Algorithm [J]. Power System Protection and Control, 2020,48(6):85.
[9] ZHOU L, CHEN Y, GUO K, et al. New Approach for MPPT Control of Photovoltaic System With Mutative-Scale Dual-Carrier Chaotic Search[J]. IEEE Transactions on Power Electronics, 2011, 26(4):1038.
[10]LIJUN G, DOUGAL R A , SHENGYI L , et al. Parallel-Connected Solar PV System to Address Partial and Rapidly Fluctuating Shadow Conditions[J]. IEEE Transactions on Industrial Electronics, 2009, 56(5):1548.
[11]雷蕾. 光伏系统不均匀光照下最大功率点跟踪研究[D].武汉:重庆大学,2011.
[12]ALAJMI B N, AHMED K H, FINNEY S J, et al. A Maximum Power Point Tracking Technique for Partially Shaded Photovoltaic Systems in Microgrids[J]. IEEE Transactions on Industrial Electronics, 2013, 60(4):1596.
[13]潘健,梁佳成,黎家成,等.阴影光照条件下光伏阵列的最大功率点跟踪方法[J].华侨大学学报(自然科学版),2020,41(4):541.
PAN Jian, LIANG Jiacheng, LI Jiacheng, et al. Maximum Power Point Tracking Method for Photovoltaic Arrays Under Partial Shading Conditions [J]. Journal of Huaqiao University (Natural Science), 2020,41(4):541.
[14]BIDRAM A, DAVOUDI A, BALOG R S. Control and Circuit Techniques to Mitigate Partial Shading Effects in Photovoltaic Arrays[J]. IEEE Journal of Photovoltaics, 2012, 2(4):532.
[15]尤笑瑩. 复杂光照下基于线性自抗扰的光伏发电系统最大功率点跟踪研究[D].保定:河北大学,2020.
[16]蒋鹏程,汤占军,刘萍兰.基于引力搜索算法的局部遮阴下光伏系统最大功率点跟踪算法研究[J].化工自动化及仪表,2020,47(3):226.
JIANG Pengcheng, TANG Zhanjun, LIU Pinglan. Simulation Research of Photovoltaic MPPT Based on GSA Algorithm [J] Control and Instruments in Chemical Industry, 2020,47(3):226.
[17]OUAHIB Guenounou, BOUTAIB Dahhou, FERHAT Chabour. Adaptive Fuzzy Controller Based MPPT for Photovoltaic Systems[J]. Energy Conversion and Management, 2014(1):843.
[18]李恒杰,李治廷,陈伟,等.基于改进P&O与MPC算法的光伏MPPT控制研究[J].电源技术,2019,43(11):843.
LI Hengjie, LI Zhiting, CHEN Wei, et al. MPPT Control Research Based on an Improved P&O and MPC Algorithm [J]. Chinese Journal of Power Sources,2019,43(11):843.
[19]吴忠强,于丹琦,康晓华.改进鸡群算法在光伏系统MPPT中的应用[J].太阳能学报,2019,40(6):1589.
WU Zhongqiang,YU Danqi,KANG Xiaohua. Application of Improved Chicken Swarm Optimization for MPPT in Photovoltaic System[J]. Acta Energiae Solaris Sinica, 2019,40(6):1589.
[20]朱作滨,黄绍平,李振兴.基于模糊理论占空比扰动法光伏发电MPPT的研究[J].控制工程,2020,27(7):1299.
ZHU Zuobin, HUANG Shaoping, LI Zhenxing. Research on Photovoltaic Power Generation MPPT Based on Fuzzy Theory Duty Cycle Disturbance Method [J]. Control Engineering of China, 2020,27(7):1299.
[21]刘宇航,刘向鑫,朱子尧,等.一种结合闭环控制的新型最大功率点跟踪算法[J].电力电子技术,2020,54(5):76.
LIU Yuhang, LIU Xiangxin, ZHU Zixiao, et al. A Novel Maximum Power Point Tracking Algorithm Combined With Closed Loop Control[J]. Power Electronics, 2020,54(5):76.
[22]王永光,戈庆长.分布式光伏发电系统多峰值MPPT优化研究[J].电力科学与技术学报,2020,35(2):3.
WANG Yongguang, GE Qingchang. Research on Multi-peak MPPT Optimization of Photovoltaic Power Generation System [J]. Journal of Electric Power Science and Technology,2020,35(2):3.
(编辑:温泽宇)
收稿日期: 2020-08-25
基金项目: 北京市自然科学基金(3202032).
作者简介:
全少理(1981—),男,高级工程师;
朴哲勇(1975—),男,硕士,高级工程师.
通信作者:
王 静(1995—),女,硕士研究生,E-mail:18511613551@163.com.
