
舰载雷达校飞中的AFM 动态定位算法研究∗
2020-05-25 09:44赵建军杨利斌杜亚杰
舰船电子工程 2020年2期
赵 芳 赵建军 杨利斌 张 骁 杜亚杰
(海军航空大学 烟台 264001)
1 引言
舰载三坐标雷达是对空预警探测的重要装备,主要提供目标方位、距离和仰角这三个参数,是舰载防空反导作战系统最重要的信息源之一。为保持三坐标雷达良好的工作状态,需定期对其测量精度进行标定。文献[1~2]针对传统标校方法的缺点,提出了一种利用无人机平台携带GPS设备进行雷达动态标校的方法,如何规划无人机的标定航迹和获取精确的目标GPS实时位置,是该方法研究的重点。
高精度GPS 动态定位的关键是正确确定整周模糊度[3],AFM 作为一种解算GPS 整周模糊度的方法,是由Couselman 和Gourevitch[4]首先提出的。随后,Remondi将AFM 用于GPS静态定位和伪动态定位[5]。Mader[6~7]将AFM 用于快速静态和动态GPS定位。
AFM 只利用了载波相位观测值的小数部分,完全消除了整周跳变的影响[8],该特点适合高动态性的雷达校飞的动态定位。但该方法的缺点是搜索耗时往往过长,主要原因是候选网点中存在大量的“正确解”,通常要将正确的网格点分离开来,需要在时间上进行累加,进而导致AFM 在动态定位中缺乏广泛的应用[9~10]。本文对雷达跟踪目标(即无人机)的标定航迹进行设计;由已知航迹对AFM进行坐标函数约束,可极大地减少模糊度搜索的计算量,提高搜索效率和动态定位的精度。
2 数学模型
2.1 模糊度函数法
AFM的定义为[11]

利用模糊度函数法求解整周模糊度的一般步骤为
1)首先利用码伪距测量值得到待测点的初始三维坐标,以待测点初始位置为中心,根据其精度确定搜索边长,构造一个三维的模糊度函数搜索空间。
2)搜索空间确定后,对每一个网格点分别按照AFM 公式计算模糊度函数,判断该点是否为待测点的真实坐标。
经过搜索后,如果剩余唯一的满足条件的网格点,则该点即为待测点的真实位置,根据待测点的位置反推整周模糊度即可。如果剩余多个网格点,则需要整合更多历元或卫星的数据进行搜索,直到剩余一个网格点为止。
2.2 坐标函数约束
坐标函数约束一般可以表示为[12]

由于无人机续航距离的约束,以及雷达精度标定的指标要求,无人机的航路范围一般不会超过20km,因此在坐标函数约束时一般使用站坐标。站坐标与空间直角坐标的转换公式为
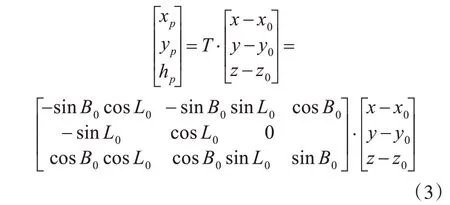
式中,站坐标系(xp,yp,hp)将测站即无人机的平面坐标和高程分开;(x,y,z)为测站的三维坐标;(L0,B0)为站坐标原点的大地经纬度;(x0,y0,z0)为站坐标原点的三维坐标。在建立站坐标时,为了标定中GPS 动态相对定位数据与雷达获取数据相统一,原点取在舰载雷达的天线中心。
3 基于舰载雷达标定航迹的约束函数
由于舰载雷达提供目标方位、距离和仰角这三个参数,因此在标定航迹的设计和约束函数的上也应从这三个参数的入手。
3.1 标校方位角精度的约束函数
标定雷达的方位角误差时,为了排除目标俯仰角对方位角误差的影响,并测量雷达方位角误差与目标方位角的关系,校飞航路设计时设定无人机在待标雷达上方的某个高度hp(100m~300m)水平面内,以雷达在该水平面的垂直投影为圆心,做以某距离r(1km~5km)为半径的匀速圆周运动。hp和r的数值取多个组合,标定雷达方位角误差,还可进一步分析雷达方位角受目标俯仰角影响的规律。航路如图1所示。
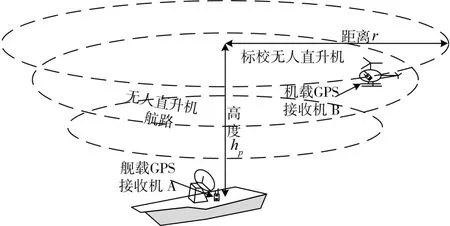
图1 无人机航路1
这种情况下存在两种形式的约束方程。一种是高程不变的约束:

另一种是无人机与雷达之间的距离不变或雷达的俯仰角不变的约束:

从无人机实际飞行状况和约束的有效性上来说,第一种高程约束更有实际意义,也更容易实现和操作。
3.2 标校俯仰角精度的约束函数
标定雷达的俯仰角误差时,为了分析目标俯仰角与雷测俯仰角误差间的关系,同时排除目标方位对俯仰角误差测量的影响,校飞航路设计时设定无人机在某个过雷达点与水平面垂直的平面内,以R为半径、以待标雷达为中心作半周匀速飞行。无人机飞行垂面与雷达指向的夹角为目标的方位角,选择多个不同的方位角校飞,标定雷达俯仰角误差,还可进一步分析雷测俯仰角受目标方位影响的规律。无人机的航路如图2 所示。通常这种航迹难以精确控制,可以在不同的方位角下,无人机做垂直上升或下降,也可以标定雷达俯仰角误差,分析俯仰角受方位角影响的规律。

图2 无人机航路2
按这种路线飞行,接收机间的距离固定,约束方程可以表示为

或方位角不变θ=c。
3.3 标校距离精度的约束函数
标定雷达的距离误差时,通常设定无人机沿位于雷达上方hp高度的水平直线由距离雷达D处向雷达飞行,这种校飞航路也是校飞中最经常使用的一种航路。hp和D取不同的组合多次飞行,标定雷达距离误差,还可进一步分析雷达测距受目标俯仰角影响的规律。校飞航路如图3所示。
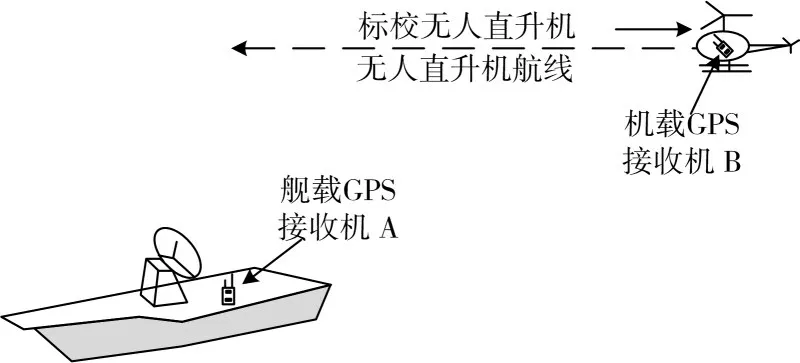
图3 无人机航路3
对于一般的空间直线约束,都要提前知道两端点的三维坐标[12],构造含有两个线性条件的方程,在实际应用中需要提前定位,不便于使用,方程的表示和应用也非常复杂。在本文的应用环境中,由于校飞航路的特殊性,空间直线约束可考虑为高程不变的类型,表示为hp=c。
若无人机可控制在向雷达直线飞行时航路捷径最短,即方位角不变,坐标函数约束可表示为θ=c。
4 坐标函数约束下的AFM判别算法
利用坐标函数对AFM 整周模糊度解算进行约束,可以采用两种思路:一是将约束方程看作已知量代入到函数模糊度函数中,在遍历搜索空间坐标点时一起计算,称为强约束,也可称为代入法。二是不对航迹与函数进行强制符合,此时坐标函数只是用来帮助加快模糊度搜索进程并进行搜索结果的验证,称为弱约束,也可称为判别法。在雷达校飞时对目标进行动态定位,由于接收机自身和外界干扰等多种因素,坐标约束函数一般都会存在误差,此时代入法会将误差代入到计算结果中,更甚会因为公式的复杂带来耦合误差。而判别法对约束方程的线性要求不高,并且可以通过约束条件减少搜索点可以大大减少搜索时间,因此文章考虑采用判别法。
坐标函数下的AFM判别算法流程如图4所示。
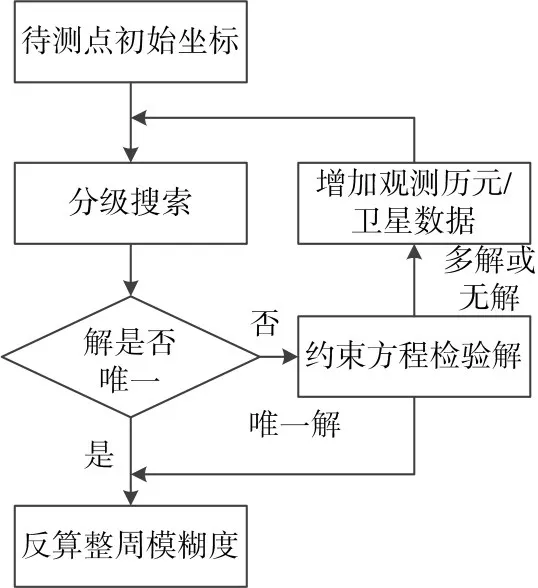
图4 坐标函数下的AFM判别算法流程
先不考虑坐标函数约束,根据伪距差分方式或其他方式确定待测点的初始坐标,并以初始位置为中心,根据其精度确定搜索的边长,构造一个如图5 所示的三维模糊度函数搜索空间,而后对空间中的点计算AFM公式值进行遍历。

图5 搜索空间的网格部分
例如先以0.1 倍载波波长为边长,即L=0.1λ,把搜索空间划分为一系列的粗网格,然后分别计算每个粗网格点的模糊度函数值。为了提高计算效率,通常采用标准化的模糊度函数。

上 式 的 值 域 是[0 ,1] 。 将 所 有 满 足NA(X,Y,Z)>T(T一般为0.85~0.95)的网格点搜索出来后,考察坐标是否满足坐标函数约束条件,此时由于是弱约束,即允许一定观测误差的存在,不要求强制符合到坐标函数上,因此一般设一个误差限定值γ,一般为目标航迹的误差,即

若误差在此限定值内,则认为该坐标解是可靠的,经过这一步检验,可大大减少网格点数,若此时仅剩唯一的满足条件的网格点,则认为该点为真实位置,由此反推整周模糊度即可。如果还剩多个网格点,则需增加更多历元或卫星的数据进行搜索,并进行坐标函数约束的考察验证,直到剩余一个网格点为止。
5 实验与仿真分析
实验采用Trimble R6 型GPS 接收机,时间为2018 年8 月12 日下午,参考站位于海军航空大学综合实验楼前空地上,流动站置于综合实验楼顶,其表面粗糙,可视为无多路径效应影响,且楼周围开阔没有遮挡,具有较高的卫星可见度。流动站在楼顶边缘进行移动可近似为无人机相对舰载雷达的移动。采样间隔均设为1s,以基准站为站坐标的原点,采用WGS-84 坐标系,流动站的运动轨迹为一段直线,流动站在轨道上作往复运动。在动态定位之前,首先利用双频数据,获得比较精确的轨道如图7(a)所示。
动态定位中捕获卫星数如图所示。从图6 可以看出,流动站和参考站的观测卫星数大部分时间在7~8颗以上,定位可靠度较高。
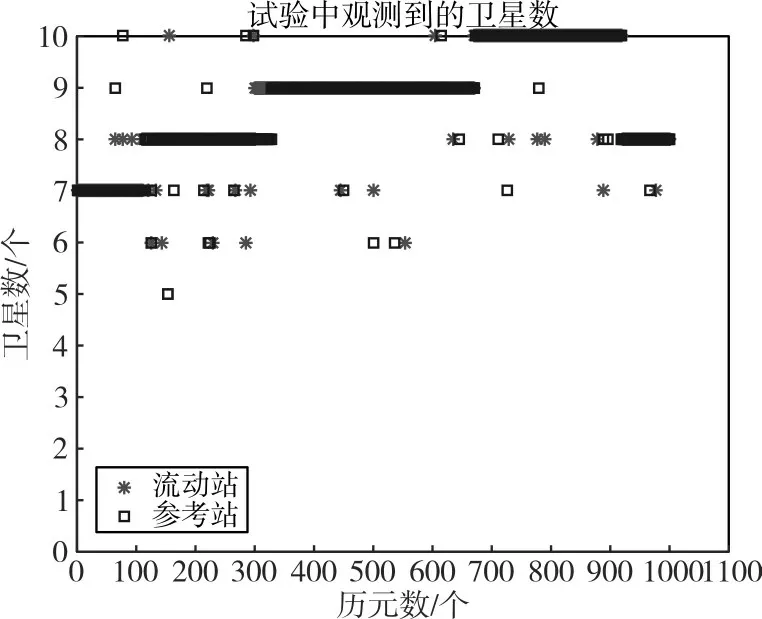
图6 捕获卫星数量图
由于AFM 对周跳不敏感,因此初始化阶段可不考虑周跳影响。在动态定位开始后,对于某个历元,即使某颗卫星的观测值发生整周的跳变,基线向量真值可以通过剩余卫星的观测值进行解算。发生周跳的单颗卫星进行初始化的计算量很小,不会对实时动态定位造成影响。
为了表征函数约束条件下的动态定位解的性能,选取了其中一段直线轨道约185 个历元进行计算。流动站距离参考站的垂直距离约为45.07m~45.15m,轨道上各测点的高程hp可近似地认为在同一平面上,可用高程不变的约束方程:hp=45.110。
由于楼体建筑和楼顶铺设等原因,轨道的方程存在误差,将其作为强约束代入AFM 算法进行计算,带来的误差累加效应未可知。其次,该实验主要为了验证弱约束AFM 的效果,为了减小GPS 信号的损失,最大程度地减少由于信号的缺失造成的实验误差,因此沿楼体边缘进行移动,未按文中所列的几种标定航迹进行移动,基线向量的三个参数都未固定,因此需要根据坐标转换方程进行约束函数的转换和线性化,线性化也会带来误差,因此这里仅考虑弱约束,不做强制的航迹符合。
在动态定位计算的时候只用单频L1 的数据,分别采用无约束和弱约束进行动态定位,以基准站作为坐标原点,由于已经进行了高度约束,因此,这里绘图时仅考虑平面x和y方向,结果见图7(b)~(d)。
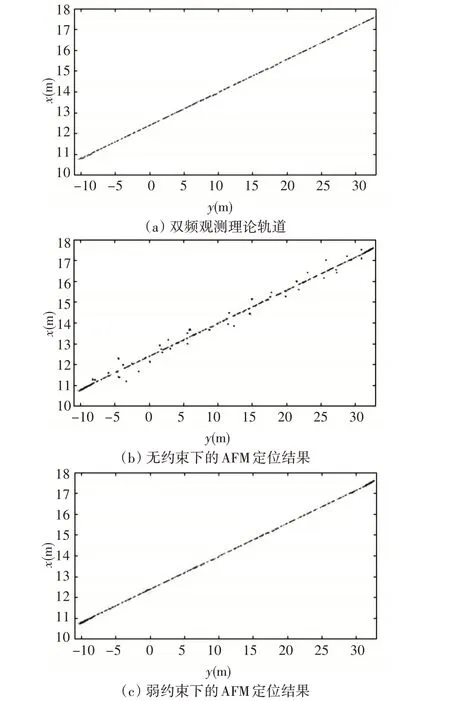

图7 弱约束下的动态定位结果
6 结语
舰载三坐标雷达校飞的重点就在于空中目标,即无人机的GPS动态位置的实时获取,之前的方法忽略了校飞航迹和动态定位算法之间的联系。而利用已知的校飞航迹对AFM 算法进行坐标约束,则可大大提高GPS 动态定位的效率和精度。进一步地,若能在无人机航迹控制上做到精准,约束方程能精确地表示轨道方程(一般误差1cm 以内),则可采用代入法以取得更好的结果,具体实现方法还需进一步讨论。如果轨道方程存在较大误差(如dm 级精度),则采用本文的判别方法会获得更好的效果。
由于待测点的坐标初值往往通过伪距差分得到,其先验精度较低,若坐标函数约束能提高坐标初值获取的精度,有望进一步提高模糊度解算的正确率,可在下一步研究中进行讨论。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
雷达科学与技术(2020年4期)2020-09-11
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
