
基于模型观测器研究降噪算法对CT图像的低对比度分辨率的影响
2020-05-23 02:18周锡明王禹鑫
中国医学装备 2020年4期
周锡明 王禹鑫 张 弛 任 烨
随着CT软硬件技术的提高,已经成为临床影像学诊断的主要手段之一[1]。CT检查的快速增长,引起CT诊断方式对患者健康影响的重点关注,尤其是CT扫描过程中过量的电离辐射会增加患者罹患癌症的风险[2]。因此,倡导尽可能的降低CT扫描剂量,针对低剂量扫描的研究不断出现,而迭代重建则被认为是一种用于降低剂量的有效方法,能够有效降低图像噪声[3-4]。采用2AFC实验人工观测器和通道化的霍特林模型观测器(channelized Hotelling observer,CHO)分别分析滤过反投影(filtered back projection,FBP)和迭代重建图像在不同剂量下的图像性能发现,模型观测器能较好的匹配人工观测器,为图像性能的检测提供了更多的任务模式和模型观测器的设计方法[5-6]。
CT图像的低对比度分辨率代表识别与背景有相近[亨斯菲尔德单位(Hounsfield Unit,HU)]的物体的能力。受到物体的形状和大小、与背景值的差异大小、剂量及噪声方差的影响。因此在低剂量扫描时,低对比度分辨率(low-contrast detectability,LCD)成为其重要的一个图像性能指标。美国的医疗成像及技术联盟(Medical Imaging and Technology Alliance,MITA)设计了用于任务观测的低对比度探测专用模体[7-8]。本研究采用基于MITA的低对比度分辨率检测模体CCT189的双向强迫选择(two-alternative forced choice,2AFC)进行仿真实验,用通道化的CHO的观测方法分析不同剂量和不同降噪水平下图像的低对比度分辨率,为低剂量诊断提供参考。
1 材料与方法
1.1 实验模体
仿真中使用低对比度检测模体CCT189,是由MITA的CT图像质量组设计的一款辅助观测实验的检测模体。CCT189检测模体相对The Phantom Laboratory生产的CT图像质量模体Catphan中的低对比度模块CTP515而言,其低对比度物体周围有足够的背景区域,不同对比度的物体中心位于相同的半径距离上等,其设计能更好的减少观测偏差。CCT189体部低对比度模体见图1。
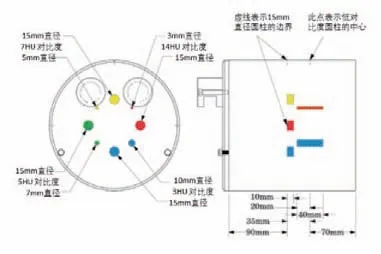
图1 CCT189体部低对比度模体
1.2 实验方法
采用的是一个简单的2AFC实验任务。观测者已知目标信号确切位置,实验任务为其呈现两幅图像,一幅图像有目标信号,一幅图像无目标信号。观测者需要在两幅图像中选择其认为有信号的那一幅图像。
1.3 数据获取
(1)参数设计。数据采集参数设计中为了得到稳定的观测结果,管电流(mAs)-降噪系数条件下的扫描次数需要高达100次。在实际CT系统上进行这样的扫描需要巨大的工作量,选择已购置Anatom 16HD型CT(深圳安科公司),联系厂家参照此机型提供相应的仿真重建数据。CCT189仿真模体见图2。

图2 CCT189仿真模体示意图
(2)数据参数。①采集模式为腹部螺旋;②滤波反投影(filter back projection,FBP)重建参数,重建中心为(0,0),层厚为1 cm,视野(field of view,FOV)为22 cm,重建矩阵大小为512×512;③管电流分别为40 mAs、60 mAs、80 mAs和100 mAs;④降噪系数分别为0、0.3、0.5和0.7;⑤采集次数为100次;⑥目标对象分别为3 HU对比度的10 mm圆柱,5 HU对比度的7 mm圆柱,7 HU对比度的5 mm圆柱,以及14 HU对比度的3 mm圆柱。⑦感兴趣区域(region of interest,ROI)为100×100。
1.4 数据处理
1.4.1 通道化霍特林模型观测器
模型观测器主要用于检测噪声背景上的目标信号[9]。对图像进行分类,判断图像上目标信号的有无。此分类有两个互斥的假设:①H0:目标信号x不存在,只有噪声背景n被观测到;②H1:目标信号x存在于噪声背景n中,其计算为公式1:
式中g是由M个像素的数字图像(r行c列)组成的M×1的列向量,k的两个数值代表着目标信号x的有无。
线性观测器是将线性模板应用到图像数据向量g以获得一个标量统计值λ作为决策变量,其计算为公式2:
式中w是一个向量,维度和g一致。
霍特林模型观测器是性能易于概况不需要太多图像统计信息的线性观测器,其模板w,计算为公式3:

其中H0:
式中Kk,(k=0,1)是随机图像g在假设Hk下的协方差矩阵。
霍特林观测器的测量统计值可表示计算为公式4:

如公式(4)所示,wHO的计算需要求图像集的总体协方差矩阵及其逆矩阵,当图像维度很大时就会有很高的复杂度。为了降低计算的复杂度,需要用到通道化处理,其计算为公式5:

式中uh为第h个通道,为第h个通道响应。合并gh就得到一个通道化的数据向量g′。
选取通道化方法为二维高斯差分(difference of gaussian,DOG),其计算为公式6:

σn=anσ0,q=2,a=2,σ0=0.015.n=1,2,3.i=1,2,3,…,100.j=1,2,3,…,100。
1.4.2 观测器评价方法
一般用观测信噪比(signal noise ratio,SNR)来衡量线性观测器的分类性能,SNR值越大,分类性能越好,其计算为公式7:

受试者工作特征(receiver operating characteristic,ROC)曲线也可衡量观测器的表现,见图3。

图3 观测器响应的概率密度函数
统计量λ在两个假设(H0信号不存在和H1信号存在)下的检测结果符合特定的概率分布,给定某个阈值T时,总共可能有4种结果:①真阳性(true positive faction,TPF),判断信号存在且实际信号存在;②假阳性(false positive faction,FPF),判断信号存在而实际信号不存在;③真阴性(true negative faction,TNF),判断信号不存在且实际信号不存在;④假阴性(false negative faction,FNF),判断信号不存在而实际信号存在)。D0,D1分别表示观测者判断信号不存在和存在,f(λ|Hk)为统计量在假设Hk下的条件概率密度函数。ROC曲线下面积(area under curve,AUC)可定量评估观测器的性能,其计算为公式8:

AUC值在0~1之间,越接近1其性能越好。
为了匹配人工观测器的随机偏差的特性,本研究在模型观测器中加入了内部噪声[5]。即在决策变量λ中加入随机扰动,其计算为公式9:

1.4.3 数据处理流程
有信号和无信号的图像分别进行通道化处理、霍特林观测器处理后,获得霍特林决策变量;通过这个决策变量,分别计算有信号和无信号图像的观测器信噪比;同时,在决策变量上加上观测器噪声,可以计算在不同噪声水平下的AUC值,见图4。
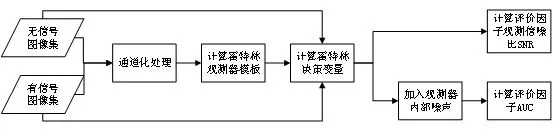
图4 数据处理流程图
2 结果
随着剂量的增加,模型观测器对不同对比度物体的识别能力都随之增强,这验证了模型观测器的有效性。无降噪处理时不同剂量下各对比度物体的观测器SNR和AUC值见图5。
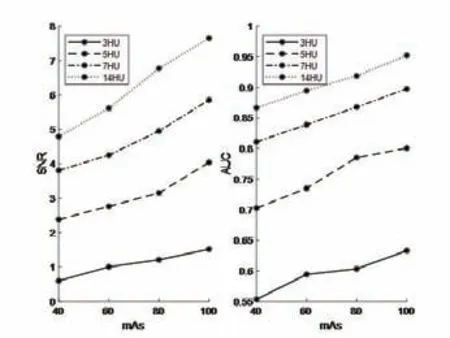
图5 无降噪处理时不同剂量下各对比度物体的观测器SNR和AUC值
同一对比度物体在剂量相同的情况下,随着降噪强度的增加,模型观测器的识别能力都有所增强,表明降噪对于低对比度分辨率的提高是有帮助的。根据AUC曲线在不同剂量下的对比,可以评估降噪算法带来的剂量降低。各剂量下各低对比度物体的观测器SNR和AUC随降噪强度的变化见图6。
图6显示,60 mAs在0.3降噪水平下的AUC和80 mAs的无降噪时的AUC相差不多,表明0.3降噪水平和1 cm、3 HU的低对比度信号下,降噪算法带来近似于25%的剂量降低。但是,在5 HU、7 HU和14 HU的AUC曲线中,80 mAs无降噪时的AUC要高于60 mAs在0.3降噪水平下的AUC,表明降噪算法带来的剂量降低,与信号本身的对比度和大小相关。
在降噪对于降低剂量的影响中,3 HU对比度物体有两组ROC曲线基本重合(60 mAs降噪系数0.3与80 mAs无降噪,80 mAs降噪系数0.5与100 mAs无降噪),也就是不同剂量的图像通过调整降噪水平能得到等效高剂量的LCD。这两条曲线,剂量降低分别是25%和20%,表明降噪算法对不同剂量的同一对比度物体的LCD提升程度不同。对比其他对比度物质的这两组条件,发现不同对比度物体在相同剂量下,使用相同水平的降噪处理,也不能得到一致的剂量降低等效性,进一步验证降噪算法的剂量降低程度与信号的对比度和大小具有相关性。降噪对于降低剂量的影响见图7。
3 结论
本研究表明,用CHO模型观测器在2AFC的实验中,用于量化低对比度分辨率是可行的,并证明了在此模型观测器下,降噪算法处理能提升低对比度分辨率。
对比分析降噪算法对不同扫描剂量、不同对比度物体的LCD的提升,发现降噪算法带来的剂量降低与剂量本身和所检测的对比度物体都有较大的相关性。虽然相关性的量化需要进一步的研究,但在用模型观测器评价一个降噪算法能带来多少剂量降低时,需要像目前国家标准中LCD评价方法一样,指明扫描剂量和所观测的物体。
本研究为临床低剂量诊断的研究提供了一种思路,能够为衡量各种图像重建算法在降低剂量方面的性能量化提供参考。
猜你喜欢
橡塑技术与装备(2022年3期)2022-03-17
桂林电子科技大学学报(2021年4期)2022-01-05
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
中国医疗设备(2020年5期)2020-05-20
中学生数理化·高一版(2020年1期)2020-02-20
智能计算机与应用(2019年1期)2019-01-11
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年24期)2017-02-02
少儿科学周刊·儿童版(2015年2期)2015-07-07
