
磁导航液囊空肠营养管的设计与磁力学性能测试*
2020-05-23 02:18常凯曦李益行史爱华严小鹏
中国医学装备 2020年4期
常凯曦 吝 怡 樊 茜 吉 琳 李益行 张 曼 史爱华 马 锋 吕 毅 严小鹏*
临床治疗中,对于不能经口进食的患者早期实施肠内营养,采用营养管途径对改善患者胃肠道功能、保护肠黏膜屏障和增强机体免疫力具有重要的临床意义[1]。常规鼻胃管作为肠内营养途径因可加重患者胃潴留,进而导致反流误吸的发生率较高,因此已被临床所摒弃。目前,临床上多采用经鼻肠管进行肠内营养的方式,鼻肠管置管的关键是将营养管头端置入空肠上段,即Treitz韧带以下,其常规置管方法有床旁盲插法、X射线下置管法以及胃镜下置管法等,且各有优缺点,临床上可根据患者具体情况选择最合适的方案[2-4]。然而,对于临床重症患者而言,各种置管的方法尚不能很好地满足临床需要,其关键问题在于飘管时间过长。
磁外科(magnetic surgery,MS)作为近年的新兴学科,已形成了以磁压榨技术、磁锚定技术、磁示踪技术、磁导航技术(magnetic navigation technique,MNT)、磁悬浮技术和磁驱动技术为核心的临床应用体系[5]。MNT是利用体外磁场牵引带动体内的响应磁体或顺磁性物质沿预设的移动路径到达目标位置的技术。国内外已有学者将磁导航应用于心脏介入手术[6-7]中,能够显著提高目标定位的准确性和安全性,减少相关并发症发生率,其优势已在临床凸显。上述MNT中充当响应磁体的均为永磁体。磁流体(magnetofluid)既具有固体磁性材料特有的磁性,又可以表现出液体材料特有的良好的流动性,该特性作为磁示踪技术的代表已用于前哨淋巴结活检[8-9]。本研究实验创新性地提出将MNT应用于液囊空肠营养管中,提出利用磁流体替代生理盐水填充液囊的方案,并测试其磁力学性能。
1 磁导航液囊空肠营养管设计
1.1 设计原理
磁性液囊空肠营养管包括液囊空肠营养管、磁流体和导航磁体(navigation magnet,NM)。液囊空肠营养管采用目前临床现有的成熟产品。磁流体为化学共沉淀法合成的含纳米铁氧体粒子和分散剂的稳定胶状悬浮液。导航磁体采用钕铁硼永磁材料加工而成。将磁流体注入空肠营养管内,磁性液囊即为响应磁体(response magnet,RM)。使用时先将空肠营养管置入胃内,然后向空肠营养管的液囊内注入磁流体,因磁体间无需接触即可产生较强的相互作用力,且此种作用力有很强的方向可控性,因而可在体外利用导航磁体引导磁性液囊沿消化道体表投影前进,从而带动营养管快速到达目标位置。
1.2 设计参数
1.2.1 磁流体
参照磁流体制备工艺[10]采用化学共沉淀法合成含纳米铁氧体粒子的磁流体。磁流体制备过程:将六水合氯化铁(FeCl3·6H2O)和七水合硫酸亚铁(FeSO4·7H2O)按2∶1.2的摩尔比溶解于100 ml去离子水中,在200 r/min搅拌下滴加入30 ml、12.5%的氨水,继续搅拌30 min,产物用去离子水充分洗涤至中性,得到纳米铁氧体粒子,向粒子中加入50%葡聚糖40000水溶液(W/V %),超声10 min,置于70 ℃水浴,以300 r/min搅拌30 min即可得到葡聚糖磁流体。
1.2.2 导航磁体
体外导航磁体为圆柱体结构,采用N45烧结型钕铁硼材料加工而成,磁体直径50 mm,高140 mm,表面电镀镍,轴向饱和充磁,磁体外套薄厚5 mm的U形塑料外壳。导航磁体表面场强6500 GS。
2 磁力学性能测试
2.1 仪器设备
采用UTM6202型电子万能试验机(深圳三思纵横科技股份有限公司)。
2.2 测试方法
使用注射器分别抽取1 ml、2 ml、3 ml、4 ml和5 ml的磁流体,将其横向固定于电子万能试验机的上方夹具中,注射器管体保持水平。导航磁体固定于电子万能试验机的下夹具上,测试磁流体与导航磁体之间的磁力-位移曲线,见图1。

图1 不同体积磁流体与导航磁体的磁力曲线测试
2.3 数据分析
导航磁体与电子万能试验机上夹具之间本身存在着一定的磁性吸引力,因此仪器测得的磁力数据并非磁流体与导航磁体之间的实际磁力(F实),其计算为公式1:

式中F测为仪器测得的磁力数据;F干扰为导航磁体与电子万能试验机上夹具之间的磁性吸引力。
以F实为纵坐标,以位移为横坐标绘制磁力-位移曲线。导航磁体与磁流体之间的吸力与磁流体量相关,磁流体量越大,磁力越大;当磁流体量一定时,导航磁体与磁流体之间的吸力与二者之间的距离成类似反比关系,见图2。

图2 不同体积的磁流体与导航磁体的磁力-位移曲线
2.4 磁性液囊空肠营养管与导航磁体体外模拟
经液囊通道向液囊空肠营养管内推注一定量的磁流体,液囊中磁流体量为3 ml,当导航磁体靠近磁性液囊时,磁性液囊被吸起,移动导航磁体可拖动空肠营养管移动,见图3。
3 磁导航液囊空肠营养管应用
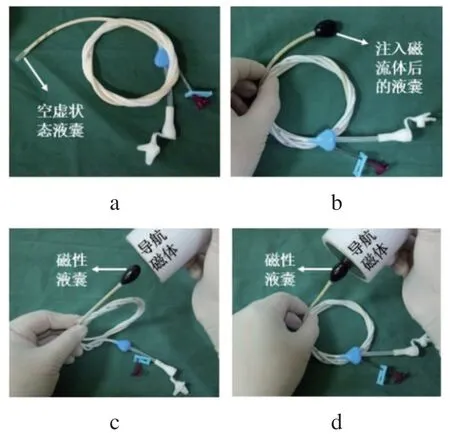
图3 导航磁体与磁性液囊实物图
磁性液囊空肠营养管的置管方法同普通液囊空肠营养管,使用前先检查液囊是否完好无破损,抽净液囊内的气体,经鼻插入,通过刻度判断营养管进入胃腔后,经液囊通道注入磁流体3~5 ml,液囊渐渐膨胀,空肠营养管与胃管分离,将导航磁体置于患者的左上腹,沿体表胃肠道走形移动导航磁体,同时缓慢推送营养管。导航磁体吸引磁性液囊缓慢移动,观察空肠营养管进入深度,根据营养管的刻度判断其是否进入空肠,最后通过X射线或B超确认位置,如位置合适则抽出磁流体,在患者鼻翼部妥善固定营养管的体外段即可。
4 讨论
鼻肠管置入后飘管时间过长是危重患者无法尽早接受肠内营养的重要原因。现有的空肠营养管改良优化方案虽有进步,但因驱动力单一,飘管等待时间仍较长,无法满足临床诊疗需要。床旁盲插法操作简单,无需特殊医疗设备支持,但飘管时间长,为增加胃肠道蠕动对营养管的推进作用,人们设计出了螺旋形鼻肠管[11]、液囊空肠营养管[12]等,赵欣等[13]也开展过利用电磁导航系统进行床旁置管的临床研究。液囊空肠营养管是由双腔的空肠导管和特制的胃管组合而成,可同时进行肠内营养和胃内减压,因其设计巧妙,并且在一定程度上改进了其他方式置管的缺陷,故被广泛应用于临床重症患者的肠内营养。但其仍存在以下缺点,仅依靠球囊重力和胃肠道蠕动,空肠管到达预定位置所需的时间依旧很长;詹卫华等[14]的临床研究显示,设定以24 h到达十二指肠韧带后为成功置入并行X射线检查进行判断,液囊空肠营养管的置入成功率约为76.7%,表明仍有四分之一的重症患者难以尽早接受肠内营养。
基于MNT原理,既往设计了磁性空肠营养管和磁导航辅助麦芒仿生空肠营养管,其模拟实验显示能有效缩短飘管时间[15-16]。液囊空肠营养管设计巧妙,头端的液囊结构赋予了空肠营养管重力驱动和胃肠道蠕动力驱动的两个内在驱动力。本研究将MNT引入到液囊空肠营养管中,充分利用磁流体的液体属性和磁性,磁流体注入液囊后可充当响应磁体,从而与导航磁体之间产生磁力。设计方案在充分保留传统液囊空肠营养管重力驱动和胃肠道蠕动力驱动的基础上,增加了外部的磁力牵引驱动。
体外模拟实验显示,当液囊内注入3 ml的磁流体后,导航磁体能够有效牵拉拖动空肠营养管移动。磁力测试显示导航磁体与磁流体之间的磁力与磁流体的量密切相关,磁流体的量越大,二者之间的吸力越大,现有的液囊空肠营养管液囊的最大容积为5 ml,导航磁体对其可产生12.33 N的最大吸力。根据导航磁体与磁流体之间的磁力-位移曲线可见,磁力与位移成近似反比关系,磁力曲线显示当位移达50 mm时,仍能获得较大的磁力。
5 结论
磁导航液囊空肠营养管与传统液囊空肠营养管相比,并不增加护理难度和患者的不适感,临床操作简单,无需大型设备辅助,具有临床应用实践的可行性。通过进一步结构优化和动物实验在体验证后,该技术有望在临床试用。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
包装工程(2022年14期)2022-07-28
现代交通与冶金材料(2022年3期)2022-06-15
物理之友(2022年1期)2022-04-19
湖北汽车工业学院学报(2021年4期)2022-01-11
黑龙江科学(2020年10期)2020-06-06
电子制作(2019年9期)2019-05-30
中国医疗设备(2019年3期)2019-03-15
家禽科学(2019年12期)2019-01-02
中国动物保健(2018年1期)2018-06-11
