
轨道交通智能限界检测技术研发及应用
2020-05-23 10:08蒋海
铁道建筑技术 2020年2期
蒋 海
(中铁十一局集团电务工程有限公司 湖北武汉 430071)
1 国内外限界检测现状
随着大量轨道交通投入运营,线路行车密度大、养护维修标准高、检修作业时间短的特点对线路的检测手段、处理方法等方面提出更高要求。轨道限界检测是轨道开通运营及运维过程中关注的重要环节,传统的轨道限界检测采用模拟的限界框的接触式测量[1],在竣工验收中安装标定工作量大,安全性低;运维中传统“限界仪”限界检测模式[2]需要较长时间,限界检测仪测量数据处理方面较限界检测框测量模式有显著改善,但在缩短检测时间、减少外业工作强度等方面效果不明显,且安全性低、数据采集效率不高。一种能够适用于隧道、高架、站台等不同场景的智能化、数据化限界检测方法,成为当今发展的急切需求。
为了进一步提高我国限界检测的技术水平、效率,建立数字化、信息化、智能化的检测体系,项目组利用三维激光测量获取数据的方式[3],研发高效、安全、对运营低干扰或零干扰的限界检测技术。高质量、高精度的限界检测方法既可以有效提高施工竣工验收限界检测水平,也可在日常养护维修、轨道状态检查中发挥重要作用,为提升铁路客运专线的安全性提供技术支撑。
2 基于激光测量扫描技术的自动化限界检测设备
采用动态移动测量方式、多传感器高精度测量轨道360°空间范围方法,研制出集激光扫描设备、高清影像设备、里程计等多类传感器于一体的轨道小车多传感器动态精密测量装置,提出基于高清影像数据的轨道断面高精度、高密度数据采集方法,针对不同的应用场景采集不同的空间信息,实现全方位覆盖轨道断面环境的数据[4],为后续轨道侵限检测判定技术研究提供数据支持。
2.1 三维激光扫描技术
轨道侵限智能检测仪通过三维激光扫描[5]设备固定在载体上,扫描仪360°高速旋转,实时获取线路横断面内的构筑物点云数据信息,同时计轴器同步里程信息实时更新扫描点位里程信息,从而完成轨道限界轮廓数据和里程的同步采集。
三维激光扫描技术主要由高速精确的激光测距仪和反射棱镜同步获取扫描点的三维相对坐标。激光测距仪主动发射激光,同时接受线路构筑物表面反射的信号从而进行测距,针对每一个扫描点可测得测站至扫描点的斜距,再配合水平和垂直方向角,可以得到每一扫描点与测站的空间相对坐标[6]。如果测站的空间坐标是已知的,那么可以求得每一个扫描点的三维坐标。
点云坐标测量原理如图1所示。被测点云的三维坐标在三维激光扫描仪确定的左手坐标系中定义,XY面为横向扫描面,Z轴与横向扫描面垂直。
每个激光脉冲横向扫描角度观测值为α,纵向扫描角度观测值为θ,测点到被测点云距离为S,因此任意一个被测云点P相对于测站的三维坐标为:
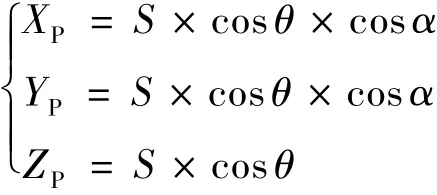
由于限界检测时以线路横断面二维平面判断构筑物是否侵限,故只需以轨平面中心为坐标原点建立二维坐标系,轨平面中心到测点距离为S1,故被测点相对于轨平面中心坐标为:
三维激光扫描技术利用激光测量技术在动态条件下对轨道进行连续、无缝、高密度、高精度断面数据采样,结合高精度的测量定位技术,完成三维点云数据的获取,最终生成高密度轨道断面的激光点云,从激光点云中检测轨道入侵情况并确定具体位置。
2.2 数据提取及处理技术
数据提取及处理技术包括激光数据处理模块、图像采集模块、DMI数据采集模块,以及针对采集回来的数据进行融合与分析软件模块,得到成果数据并进行参数的设定及模型的搭建。将激光扫描设备断面内的点云实时绘制,点云数据与设备限界标准数据分析对比,判定此位置是否侵限。
2.2.1 点云获取预处理
扫描仪获取的点云表面参差不齐,会严重影响限界的精度,因此在对点云进行获取时,先对点云进行过滤,剔除点云周围的毛刺点。原始点云的坐标为极坐标,可以采用卡尔曼滤波方法对点云进行过滤,最后将极坐标转换成平面坐标以便进行后续分析。
(1)卡尔曼滤波
Kalman滤波器考虑用如下状态空间模型描述动态系统:

式中,k为离散时间,系统在时刻k的状态为X(k)∈Rm;Y(k)∈Rm为对应状态的观测信号;W(k)∈Rr为输入的白噪声;V(k)∈Rm为观测噪声;Φ为状态转移矩阵;Г为噪声驱动矩阵;H为观测矩阵。
式(1)为状态方程,式(2)为观测方程。
通过卡尔曼滤波可以计算出单帧点云数据中所有点相对于该帧点云中心的距离D。
(2)极坐标转平面坐标
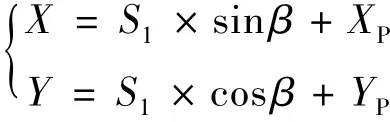
式中,A为点的天顶角;A1为点的天顶角弧度值;V为点的方位角,V1为点的方位角弧度值;D为点到该帧点云中心的距离;X为平面坐标系中该点X坐标值;Y为平面坐标系中该点Y坐标值。
其中式(3)、(4)分别计算点的天顶角和方位角的弧度值,式(5)计算点的平面坐标X值,式(6)计算点的平面坐标Y值。
2.2.2 点云轨道模型配准
(1)点云过滤
提取左右轨道点云,通过对轨道点云的分析后发现,由于设备精度、操作者经验、环境因素带来的影响以及电磁波的衍射特性与被测物体表面性质变化和数据拼接配准操作过程的影响,轨道点云数据中不可避免地出现一些噪点。在点云轨道模型匹配过程中滤波处理作为预处理的第一步,对后续的影响比较大,只有在滤波预处理中将噪点、离群点滤除,才能够更好地进行配准以及限界检测分析。
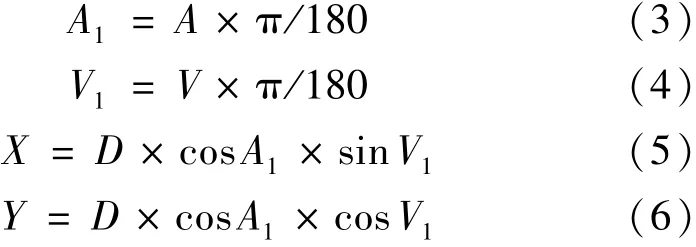
根据获取地铁点云数据的特点,采用了基于半径聚类的方式对离散噪点进行滤除。该算法遍历点云内每个点,如果在该点半径r内的点数小于设定的阈值T,则将该点视为噪点。如图2所示,如果阈值T=1,则左侧圆心点的会被删除,如果阈值T=2则左右侧圆心两个点都将被删除。
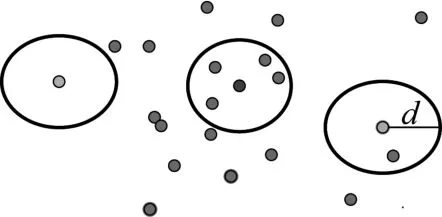
图2 滤波处理示意
(2)轨道模型匹配
针对轨道模型匹配
采用ICP算法。ICP算法是一种基于纯粹几何模型的3D对象对齐算法,其本质是基于最小二乘法的最优匹配算法,首先通过确定具有相应关系的集合,然后计算最优的刚性变换,重复这个过程直到满足正确匹配的收敛准则,从而找出目标点集P到参考点集Q的旋转变换量R和平移变换T。在本技术方案中,目标点集即为滤波后的轨头点云数据,而参考点集即为标准的轨头模型点集。
将经过数据提取和去杂后的点云实时绘制,可以形成现场真三维点云场景数据模型图。
3 轨道侵限系统
轨道侵限智能检测系统[7-8]通过对三维激光扫描仪的操控并根据里程同步模块的实时里程记录,将激光扫描设备断面内的点云实时绘制,点云数据与设备限界标准数据进行分析对比,判定此位置的点云是否侵限,以音效预警,并记录超限位置的里程、影像及超限信息等,支持数据导出形成数据报告[9]。
3.1 数据提取转换及侵限判断技术
轨道交通限界是以钢轨顶面连线中点为原点、以钢轨顶面连线为X轴、以垂直于钢轨顶面连线为Y轴建立的直角坐标系中的封闭曲线。3D激光扫描仪原始数据是以激光扫描仪为原点坐标,需要根据检测原理中坐标转换计算方法,将原始数据坐标转换为轨平面坐标,统一坐标系。三维激光扫描仪所采集原始数据为无数从线路两侧构筑物表面反射的点云数据,每个点在坐标系中对应有数值关系。通过程序中坐标转换算法,与设计设备限界进行分析对比,判断所采集点云数据是否大量存在于设备限界内,则得出构筑物是否侵限[10],见图3。
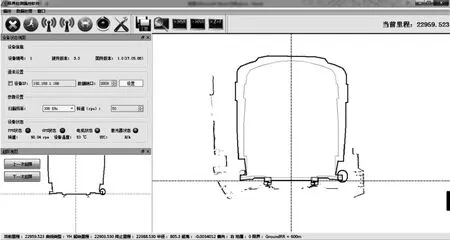
图3 限界检测成像
3.2 杂散点去除技术
在构筑物表面进行数据采集过程中,当出现金属体反光、风沙扬尘等现象时,激光扫描传感器可能会产生无规律、离散的扫描点,称之为散点。这种散点处于限界标准内,如果把此类型的散点判断为侵限点,将对最终结果造成较大的偏差。由于这种散点和其它扫描数据存在较大的偏差,限界检测程序采用中值滤波算法,将连续采样的奇数个数据进行排序,取中间值为滤波后的数据,能很好地过滤掉散点干扰,降低了散点对检测结果造成的偏差[11]。
3.3 检测数据显示及存储技术
轨道侵限智能检测仪在采集构筑物数据、同步里程数据的同时,数据同步分析单元也在实时计算所采集数据中是否有点云数据侵限,将侵限数值、当前里程、侵限物影像进行存档,便于整改查看,数据模型图和检测结果实时显示至软件界面。
3.4 实际检测结果示例
以某地铁一段检测结果为例,检测后自动生成侵限报告,表明疏散平台处存在侵限,需要进行整改,见表1。

表1 侵限数据统计
4 现场应用效果
城际铁路、高速铁路、城市轨道交通等铁路[11]虽然制式不同,不同线路类型对限界要求不同,但本技术采用非触式自动化检测方法,对线路类型无局限,只需更改计算软件中限界参数即可实现不同制式不同线路类型的限界检测。因此,此技术可用于所有铁路[12]的建设与维护。
随着城市轨道交通领域的发展,更多的城市大力发展轨道交通,限界检测作为必要工序,任何线路竣工开通前及运营维护期间均需要对线路进行限界检测,防止有异物侵限阻碍列车运行。该技术针对城市轨道的智能化限界检测技术,具有测量精度高、稳定性好、操作简便、工作效率高的特点,有极大的市场优势。
轨道侵限智能检测技术自2017年成功研制以来,已在上海、杭州、长沙、常州、贵阳、无锡等地项目推广应用,完成了近400条线路限界检测,以良好的性能、超高的效率获得业主、设计及监理单位的好评。
猜你喜欢
铁道标准设计(2022年10期)2022-10-10
现代仪器与医疗(2022年2期)2022-08-11
都市人(2022年3期)2022-04-27
国际太空(2021年8期)2021-11-05
交通科技与管理(2021年5期)2021-06-13
环球时报(2019-12-05)2019-12-05
模具制造(2019年3期)2019-06-06
山东工业技术(2016年14期)2016-07-05
现代营销·经营版(2015年3期)2015-04-20
太空探索(2014年4期)2014-07-19
