
能力风暴智能机器人无线通信系统的研究
2020-05-22 01:01湖南科技学院实验实训中心钟丽菲
河北农机 2020年4期
湖南科技学院实验实训中心 钟丽菲
引言
当今时代,人类对机器人的研究越来越深入,其研究成果也越来越丰硕,其研究力度和研究层次都在不断加大、不断深入。人们期待智能机器人之间能够彼此交流,互相协作,完成一些繁琐复杂的工作任务,例如在某些火灾场景中,为了保障救火员的人生安全,又要完成灭火的重任,就可以依靠机器人来完成灭火工作。但灭火需要统筹指挥,彼此沟通,灭火时机、灭火位置、灭火计划都需要交流沟通,因此灭火机器人也必须彼此交流,互相协作,共同完成灭火的重任。
通信是不同机器人之间互相交流的基础,通过通信,机器人才能了解其他机器人发送的指令,继而完成相应的操作,在通信方式中,无线通信是最便捷、最高效、最理想的通信方式。
本文以力风暴智能机器人为实验平台,利用体积轻巧的单片机为通信工具,通过对接好单片机和机器人之间的接口,来实现机器人之间的无线通信。
1 能力风暴智能机器人平台
本文的实验内以能力风暴智能机器人为研究对象,能力风暴直径为30cm,高13cm,能力风暴的顶端设置为半圆形,底端安装一个具备圆形碰撞环的、能够移动的机器人,机器人的微处理器选用单片机M68HC11,在微处理器中安置32 k 的静态不挥发RAM,辅助以驱动、通讯、复位等外围电路。
在进行试验之前,要保障能力风暴智能机器人平台具备以下功能;
(1)平台底部的机器人能够自主移动。它应该是一个适应能力强,具有具体规划,灵活性强,能够在繁琐复杂场景内工作的智能机器人。
(2)传感器的数量要尽可能地多,且传感器的质量应该有所保障,其感知能力要强。传感器的构造应该具备一个红外接收模块,此外还应该有两支红外发射管以及4 个碰撞传感器。此外传感器还必须配备旋转角度编码器以及麦克风。红外传感器的传感能力为,可以感应正前方120°以内,距离红外传感器10~50cm 内的物体;红外光传感器应该能够准确地判断强弱光;碰撞传感器应该安装在碰撞环上,感受东西南北四个方向上以及东西南北四个方向45°夹角线上的碰撞;麦克风的功能是感知周围声音的强弱,其并无方向之分;旋转编码器可以精准地计量机器人转轮的角度。
(3)能力风暴机器人之间都使用M68HC11 单片机,且必须使用交互式C 语言对单片机进行编程。交互式C 语言结构分为编译环境以及机器人操作系统,交互式C 语言的优点是能够同时进行多个编程,允许多个程序同时运行。机器人与计算机的连接方式是串口连接,在计算机内部编好的程序可以经由串口线输送到机器人内部,从而发出相应的指令,操作机器人执行相关命令或者让机器人主运行。
(4)机器人设计了硬件扩展总线ASBUS(abili2ty storm BUS)。设计硬件扩展总线的好处是便于机器人拓展外围电路,为智能机器人之间的交流协作提供必要的基础。硬件扩展总线有A,B 两组,两组加起来的信号线共计28 根。
在实际的实验中,以下提及的信号线都是必须用到的、主要的信号线:VCC:5V 电源;GND:地;PC0~PC7:数据线:OS0~OS3:输出选择线0~3;IS0~IS3:输入选择线0~3;PA1~PA2:输入捕捉口;PA3:输出比较口。
2 机器人之间无线通信的硬件设计
2.1 无线通信模块
顾及到机器人本来就具备的特性,以单片机为微处理器的无线通信是机器人之间最高效、最便捷、最理想的通信方式。在本实验中的,单片机内的无线收发模块为PTR2000。PTR2000 既能够收信号,也可以发信号,它具备收发一体的功能。具体来说,PTR2000 还可以高频率地发射信号和接收信号,能够放大信号,合成信号,切换频率等,该无线收发模块主要有以下特性:
(1)集发射和接收为一体,体积小,约40 cm×27 cm×5 cm;
(2)工作频率为国际通用的数传频段433MHz,采用FSK 调制/解调,可直接进行数据输入/输出,抗干扰能力强;
(3)工作电压2.70~5.25 V,功耗小,接收待机状态电流仅为8μA;
(4)工作速率最高可达20 kbit/s,也可在较低速率,如4800,9 600 bit/s 下工作,无需设置模块通信速率;
(5)使用时不需要许可认证,在地形开阔的环境下,其使用距离能够接近1 千米。PTR2000 一共7 个引脚,每个引脚具备的功能都不尽相同,具体如下;
VCC(1 脚):正电源输入端,接2.70~5.25V;
CS(2 脚):频道选择端,CS=0 时,选择工作频道1,即,433.92 MHz;CS=1 时,选择工作频道2,即,434.33MHz;DO(3 脚):数据输出端;
DI(4 脚):数据输入端;
GND(5 脚):电源地;
PWR(6 脚):节能控制端,PWR=1 时,模块处于正常工作状态;PWR=0 时,模块处于待机微功耗状态;
TXEN(7 脚):发射/接收控制端,TXEN=1 时,模块被设置为发射状态;TXEN=0 时,模块被设置为接收状态[2]。
2.2 总体设计框图
考虑到机器人本身的特点以及无线收发模块的特点,设计了能力风暴智能机器人之间的无线通信框架图。

图1 机器人无线通信总体框图
2.3 无线收发模块与机器人之间的接口电路设计
在实验中,所有的机器人都必须具备发送无线数据和接收无线数据的功能,因此每个机器人身上都必须安装无线收发模块。又因为能力风暴机器人上的串口另有其他的作用,无法安装无线收发模块,因此就有必要在机器人和无线收发模块的中间区域安装一个型号为2051 的单片机。此单片机的作用是,连接机器人和无线收发模块,向机器人反馈接收或者发送的信号。在具体的连接过程中,无线收发模块的数据输出端应该和单片机的串行接收端对应连接,而单片机的串行发送端应该和无线收发模块的数据输入端相连。单片机和和机器人的具体连接方法为,能力风暴机器人的数据口(PC0~PC7)应该和单片机的P1口对应连接,此外,机器人扩展总线上的输入捕捉口应该和单片机的P3.4 相接,而机器人扩展总线上的输出捕捉口应该与单片机上的P3.2 相接。
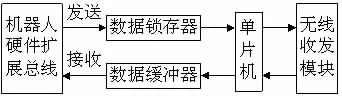
图2 接口电路原理框图
3 机器人之间无线通信软件实现分别
机器人之间的信号接收和信号发送需要通过软件编程才能实现,无线收发模块的双向通信也需要通过编程才能实现[10]。其原理为单片机将串行读取的数据放入单片机内部的寄存器中,当完成此环节时,接收数据的第1 位是起始位0,第2~9 位是数据位,在发送数据时,会遵循先发送低位,后发送高位的规则,第10 位是停止位1,接下去的12 位都为1,即为发送数据的时间间隔5.5ms(11×500μs=5 500μs),最后一位是新一帧数据的起始位。
4 实验结果分析
在两个能力风暴智能机器人的身上装上单片机微处理器,装上无线收发模块,两个机器人分别记作机器人1 和机器人2,机器人1 与机器人2 之间的间隔距离为120m,中间没有高大的障碍物,地势平坦。机器人1 负责发送数据,机器人2 负责接收机器人1 发送的数据。举例来说,如果机器人1 发送信号40H,41H,42H,43H,这些信号分别代表前进,后退,左转以及右转,当机器人2 接收到机器人发送的这些信号时,就应该执行相应的指令,前进或者转动。机器人1 发送的数据以及机器人2 执行的指令整理成了下表1。

表1 数据传输测试结果
分析上表能够知道,在120m 以内的有效范围内,本文设计的无线通信方法能够让能力风暴智能机器人高效交流,机器人之间的信号发射和信号接收都是快速且高效的。
5 结语
本文根据所提出机器人与机器人之间的无线通信原理,设计了机器人之间无线通信的硬件模块,编写了无线通信的软件实现。通过实验测试表明,在有效的距离范围内,多个机器人之间能够快速地发射和接收信号。该无线通信实验,没有通过计算机实现数据交换,而是直接通过无线通信实现机器人之间的直接数据传输,让机器人之间具备了直接交流的功能。多机器人系统研究作为一个热点研究方向,本文的实现方法具有重要的参考价值。
猜你喜欢
无线互联科技(2021年4期)2021-04-21
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
智慧少年·故事叮当(2018年12期)2018-05-14
散文诗(2017年12期)2017-08-23
