基于北斗系统的双频观测值时间相关性研究
2020-05-22 08:43方伟黄河机械工业勘察设计研究院有限公司陕西西安710034
安徽建筑 2020年4期
方伟 ,黄河 (机械工业勘察设计研究院有限公司,陕西 西安 710034)
0 前言
北斗卫星导航系统(以下简称北斗系统)是中国出于国家安全和经济社会发展的需要,自主研发、建设、独立运行的卫星导航系统,能为用户提供全天候、高精度的导航、定位和授时等多项服务。卫星定位通常采用高斯-马尔科夫模型,函数模型描述了待估参数和观测值之间的联系,随机模型用来描述观测量的先验精度及观测量间可能有的统计关系,随机模型直接影响着待解参数值,对于线性观测模型,如果随机模型建立的不够准确,会导致估计值产生偏差,进一步导致定位精度的降低。
为了获得最优(方差最小)线性无偏估计,应当建立更准确的随机模型。观测值STD和观测值时间相关性会影响随机模型[1],目前关于随机模型的研究大多都是基于GPS展开研究的,北斗系统在组成上与GPS有着明显的差异,因此需要建立适合北斗系统的随机模型,分析北斗卫星观测数据时间相关性和观测噪声为后续更准确的随机模型提供理论基础。
近年来。一些学者基于最小二乘估计、最小平方估计、最大相似估计、最小范数二次型无偏估计、最优不变量二次无偏估计等理论建立了一些具有可行性而且简化的参数模型,这些参数模型对于实际观测模型有着一定的优化作用[1-16]。早在1998年Jonkman提出了观测值时间相关性会影响整周模糊度的固定[1]。之后BoFeng LI在2008年研究了GPS观测值时间相关性[3]。目前还缺乏针对北斗导航系统卫星观测值时间相关性研究。
本文在RTKLIB开源库基础上,通过VS2013搭建实验平台,熟悉差分定位模型整个流程,通过添加自编代码,获取基本实验数据,分离北斗观测值3类卫星观测数据,分别统计观测值时间相关性和观测值精度。通过4种不同接收机采集的数据,从观测值时间相关性、观测值精度进行分析。
1 数学模型
1.1 基本观测方程理论
1.1.1 伪距观测值
北斗卫星导航系统的信号由载波、测距码和导航电文3部分组成,测距码是用以测定从卫星到地面测站间距离的一种二进制码序列。利用测距码可以测定卫地间距离。
1.1.2 伪距观测方程
在伪距测量中,直接测量的是信号到达接收机的时刻tr(接收机测量)与信号离开卫星的时刻ts(卫星钟测量)之差tr-ts,此差值与真空中的光速C的乘积

当卫星钟与接收机钟严格同步的时候,tr-ts即为卫星信号传播时间。实际上接收机钟差都是有误差的,它们之间无法严格的同步,现设卫星钟与标准GPS时有Vts的误差,接收机钟与标准GPS有Vtr的误差,则经过卫星钟误差和接收机钟误差改正后卫地距为ρ'

(tr+Vtr)-(ts+Vts)为信号真正传播时间,但信号在穿过对流层和电离层时并不是以光速c传播的,所以真实距离需加上电离层延迟I,以及对流层延迟T。
故伪距观测方程为:

其中ρ为真实距离。设卫星某观测时刻位置为

考虑测量噪声ε,则伪距方程为

1.1.3 最小二乘估计
最小二乘法(又称最小平方法)是一种数学优化技术。它通过最小化误差的平方和寻找数据的最佳函数匹配。利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小。
1.2 常用随机模型
随机模型描述了观测值的先验精度及观测量间可能有的统计关系。常用的确定随机模型的方法有等权法、高度角函数映射法、信噪比定权法(SNR)方法。
2 时间相关性估计
2.1 单差观测模型
在相对定位中,最普遍使用的就是双差模型,通过双差模型,可以降削弱或者消除绝大部分误差,例如:对流层延迟,电离层延迟,与卫星相关的误差,接收机钟差等[17]。
在某些情况下,单差观测模型比双差模型更适用,原因如下:
①单差观测模型的建立无需参考卫星;
②只需引入单差观测标准差就可计算数学相关性;
③建立观测方程简单。
2.2 观测值的精度估计
引入双差模糊度和已知基线后,载波相位观测值实际上就转换成了伪距观测值,下面仅介绍P1。
假设所有的原始观测数据都是独立的,精度只受观测值类型影响,故协方差矩阵可表示为

表示宽度为k的单位矩阵,为单差观测值的方差,因为采用的是同一种接收机,可以认为两接收机的随机模型一致。
为观测值的协方差,因此,精度可表示为:
3 实验和分析
3.1 实验研究
实验采用了4种不同接收机,分别是天宝、司南、徕卡、中海达,4种接收机使用同一天线采集观测数据,采样率为都为10s,同一型号接收机共用一根天线,截止高度角为其中天宝数据采集于2016年5月22日0时,共24h。中海达数据采集于2018年4月3日16时,共24h。徕卡数据采集于2018年4月27日0时,共24h。司南数据从2018年5月11日16时开始,共24h。上述数据均为8640历元。
零基线数据通过2台接收机共享同一接收机天线,对观测值进行差分处理,不仅可以消除测站间的共有误差,而且卫星信号传播过程中的多路径效应影响也会被消除,因此误差只来源于观测噪声和接收机硬件延迟。采用RTKLIB平台读取和筛选观测数据,通过自编代码行相关系数计算,利用RTKLIB中差分模块进行双差模糊度解算。为了分析时间相关性,分离出北斗系统GEO卫星和IGSO卫星,分别计算相关系数,同时计算GPS卫星相关系数。使用北斗双频数据及GPS双频观测数据,将C1,P2,L1,L2分别统计相关系数,同时计算观测数据精度,最后将结果用图表展示。
3.2 数据分析
通过实验可以看出:对于天宝接收机伪距观测值时间相关性,GEO观测值时间相关性系数稳定在0.75,整体呈一条直线。IGSO观测值时间相关性整体呈现先下降后上升的特征。GPS(MEO)观测值时间相关性整体呈下降趋势,从0.70开始在2250历元达到0.07,之后略有回升,然后继续下降。对于载波观测值时间相关性,GEO稳定在1.0,整体为一条直线。IGSO观测值时间相关性整体呈下降趋势,幅度较小。GPS(MEO)观测值时间相关性整体呈下降趋势,从0.93开始在2250历元附近减小至0.07左右,之后略有回升,然后继续下降。
对于司南接收机伪距观测值时间相关性,GEO观测值时间相关性系数稳定在0.73,整体呈一条直线。IGSO观测值时间相关性呈现先下降后上升的特征,在2500历元附近开始回升,G(MEO)观测值时间相关性整体呈下降趋势。载波观测值时间相关性,GEO观测值时间相关性系数从1.0开始,稍有下降。IGSO观测值时间相关性呈现先下降后上升的特征,在2500历元附近开始回升,GPS(MEO)观测值时间相关性整体呈下降趋势。
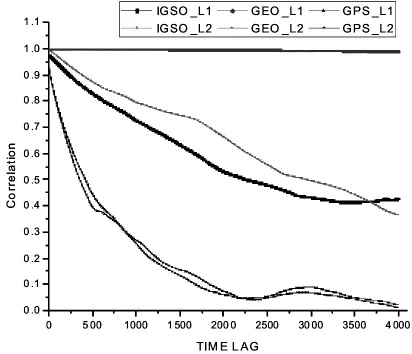
图1 (天宝)北斗双频载波观测值时间相关性
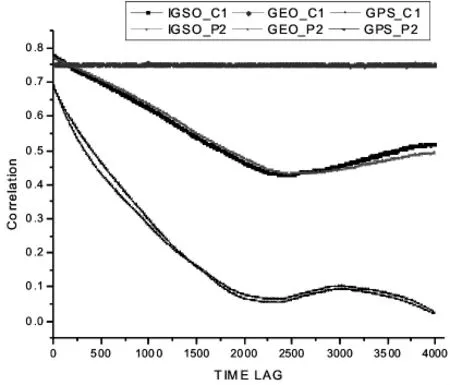
图2 (天宝)北斗双频伪距观测值时间相关性
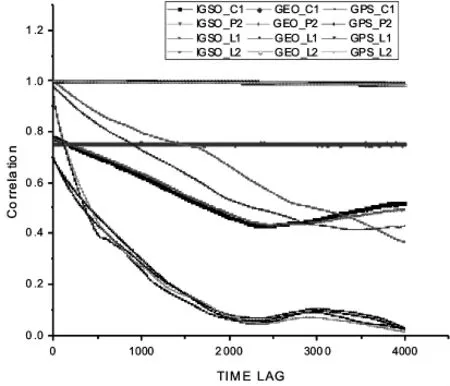
图3 (天宝)北斗双频观测值时间相关性
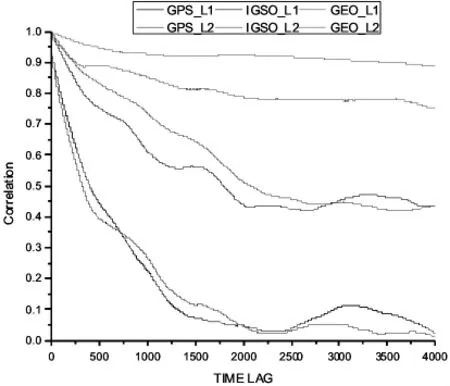
图4 (司南)北斗双频载波观测值时间相关性

图5 (司南)北斗双频伪距观测值时间相关性

图6 (徕卡)北斗双频载波观测值时间相关性
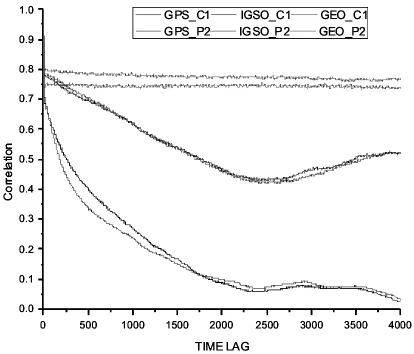
图7 (徕卡)北斗双频伪距观测值时间相关性
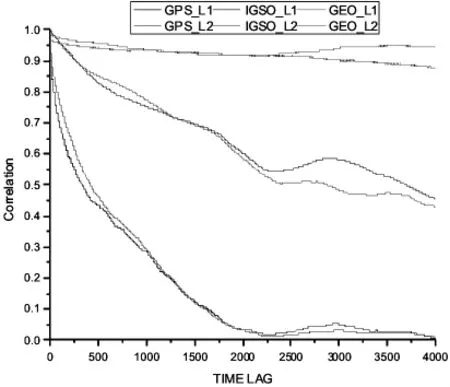
图8 (中海达)北斗双频载波观测值时间相关性
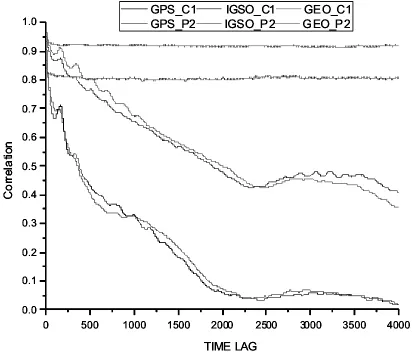
图9 (中海达)北斗双频伪距观测值时间相关性
对于中海达接收机伪距观测值时间相关性,GEO观测值时间相关性系数C1稳定在0.83,P2稳定在0.94。整体先下降后呈一条直线。IGSO观测值时间相关性呈现先下降后上升的特征,在2500历元附近开始回升,之后又出现下降趋势,GPS(MEO)观测值时间相关性整体呈下降趋势。载波观测值时间相关性,GEO观测值时间相关性系数从1.0开始,稍有下降。IGSO观测值时间相关性呈现先下降后上升的特征,在2500历元附近开始回升,之后又出现下降趋势GPS(MEO)观测值时间相关性整体呈下降趋势。对于徕卡接收机伪距观测值时间相关性,GEO卫星C1稳定在0.80,P2稳定在0.75。IGSO卫星从0.8开始下降在2500历元附近开始回升。MEO卫星从0.7开始下降。载波观测值时间相关性,GEO观测值时间相关性系数从0.9开始,稍有下降,在1.0附近波动。IGSO观测值时间相关性呈现先下降后上升的特征,在2500历元附近开始回升。GPS(MEO)观测值时间相关性整体呈下降趋势。
综合不同类型的接收机结果,可以看出伪距观测值的时间相关性要低于载波相位观测值的时间相关性,伪距观测值的时间相关性从约0.8左右开始减小,载波相位观测值从约1.0开始下降。IGSO初始伪距观测值相关性要强于GEO卫星。
GEO卫星观测值在时间上具有很强的相关性,伪距观测值相关系数维持在0.8左右,天宝接收机载波相位观测值相关系数十分接近于1.0,趋近于一条直线,其余接收机相关性在0.9附近波动。IGSO卫星观测值的时间相关性整体先成下降趋势,在相距2500历元附近时相关系数逐渐上升,载波观测值与伪距观测值时间相关性变化近似相同。MEO卫星(GPS卫星)观测值时间相关性整体随着相距时间增大逐渐减小,载波相位观测值时间相关性降幅较大,在2250历元附近降至0.1附近趋于平稳。
天宝观测值精度,IGSO卫星观测值精度要优于MEO卫星,GEO卫星,除P2优于MEO之外,其与观测值精度都低与MEO对应观测值精度。MEO卫星C1和P2码都约为0.15m,与常用的先验方差大致相等。而IGSO和GEO的观测值精度较之MEO都有较为明显的差距。司南接收机观测值精度,伪距观测值精度要优于天宝接收机观测值。GEO卫星载波观测值精度较差。
2种接收机伪距观测值时间相关性基本一致。而载波相位观测值时间相关性有较小的区别,因天宝观测数据采用了相位平滑技术,而司南观测数据时未采用。
4 结论
本文从北斗卫星导航系统卫星类型出发,编写了北斗卫星观测值时间相关性计算相关代码,通过4种不同接收机的观测数据,分离了北斗3类卫星观测数据,分别进行计算时间相关性以及观测值精度,分析不同类卫星在观测值时间相关性、观测精度上的区别,得出以下主要结论:
①北斗系统 GEO,IGSO卫星与GPS卫星时间相关性变化不一致;
②北斗系统GEO,IGSO卫星观测值精度与GPS卫星观测值精度有一定差距;
③载波相位观测值时间相关性整体要强于伪距观测值时间相关性。
猜你喜欢
地理空间信息(2022年10期)2022-10-31
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
导航定位学报(2021年5期)2021-10-13
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
导航定位学报(2020年6期)2021-01-05
中国电气工程学报(2019年18期)2019-10-21
全球定位系统(2019年4期)2019-08-30
电子制作(2019年24期)2019-02-23