
车辆座椅和悬架系统的参数自调整模糊PID集成控制
2020-05-21 03:14田海勇王靖岳梁洪明
机械研究与应用 2020年2期
田海勇, 王靖岳, 张 勇, 梁洪明
(1.中车大同电力机车有限公司,山西 大同 037038; 2.沈阳理工大学 汽车与交通学院, 辽宁 沈阳 110159;3.湖南大学 汽车车身先进设计制造国家重点实验室,湖南 长沙 410082; 4.厦门金龙旅行车有限公司,福建 厦门 361026;5.中国质量认证中心沈阳分中心,辽宁 沈阳 110013)
0 引 言
车辆的行驶平顺性和舒适性是人们关注的热点问题。20世纪60年代以来,国内外专家学者开始研究主动、半主动控制悬架系统,提出了不同的控制方法,如最优控制[1-2]、自适应控制[3-4]、模糊控制[5-6]、人工神经网络[7-8]等。随着座椅设计技术的提高,出现了可控座椅,大大提高了乘座舒适性,也把一些控制方法应用其中。张志勇等针对座椅悬架系统参数的不确定性和位移测量难题,基于线性矩阵不等式和H∞最优控制理论,设计了座椅悬架系统的参数不确定性H∞输出反馈控制器[9]。朱跃等针对含有人体动态的座椅悬架系统,通过合理选择状态变量及干扰变量,从控制通道输入的匹配干扰来建立路面激励,同时考虑模型参数变化这一类不匹配干扰对系统的影响,基于滑模控制理论,设计了全程滑模切换函数;结合不匹配干扰估计器,构建了座椅悬架系统控制器[10]。赵强等提出基于半车解耦模型的半主动座椅悬架的模糊滑模控制,通过与PID控制、滑模控制和被动悬架仿真结果的对比验证了仿真结果,该方法明显减小了座椅振动[12]。姜鹏等设计、制造并测试了一种可同时实现垂向和纵向振动衰减的半主动集成座椅悬架系统,对比分析了半主动模糊控制、半被动控制以及被动控制状态下座椅悬架系统的振动性能,将仿真结果用搭建的实验测试系统进行了验证[13]。随着汽车向集成化、智能化、节能化等方向发展,人们开始将车辆悬架和座椅悬架进行集成控制,郭立新等先后提出基于线性矩阵不等式优化技术的主动座椅悬架和车辆主动悬架的鲁棒H∞集成控制策略和变增益LQR集成控制策略[14-15]。胡国良等提出了一种联合车辆主动悬架与座椅主动悬架的集成最优控制[16]。殷康胜等以驾驶员座椅和悬架系统为研究对象,运用将不同优化算法组合的方法对驾驶员座椅和悬架系统结构参数进行优化并获得最优解集[17]。从以上文献中可以看出,要么单独控制车身,要么单独控制座椅,把两者结合起来的集成控制研究还比较少且算法单一,值得广泛深入研究。
笔者设计了参数自调整模糊PID控制器,分别应用在车身控制、座椅控制和对车身和座椅的集成控制模型上,以人体加速度、座椅加速度、车身加速度、悬架动挠度和车轮动载荷为评价指标对比分析了集成控制策略的优越性。
1 “车-椅-人”系统模型
图1为一个简化了的1/4车体四自由度车辆悬架系统集成控制模型。
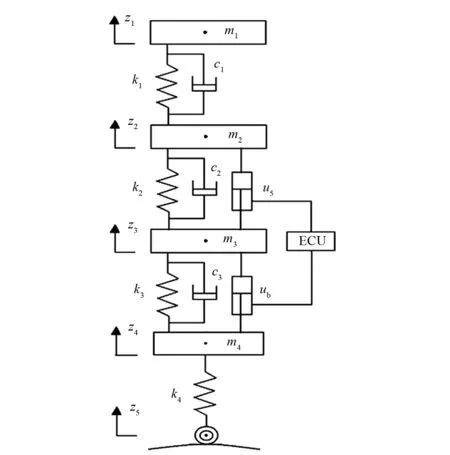
图1 “车-椅-人”系统集成控制模型
图中k1为坐垫等效刚度;k2为座椅弹簧刚度;k3为悬架等效刚度;k4为轮胎等效刚度;m1为人体质量;m2为座椅质量;m3为车身质量;m4为轮胎质量;c1为坐垫等效阻尼系数;c2为座椅等效阻尼系数;c3为悬架等效阻尼系数;z1为人体质心的垂直位移;z2为座椅质心的垂直位移;z3为车身质心的垂直位移;z4为轮胎质心的垂直位移;z5为路面输入位移;us、ub是由控制器控制的变阻尼减振器所产生的阻尼力,ECU为汽车专用计算机控制系统。
该系统的动力学微分方程为:
(1)
2 参数自调整模糊PID控制器的设计
参数自调整模糊PID控制融合了PID和模糊思想。首先,利用PID算法,以座椅的垂直运动速度e及速度变化率ec作为系统控制输入量;然后,利用模糊规则对e和ec进行模糊推理;最后,对参数进行调整,进而满足不同时刻对参数自整定的要求。修正参数ΔkP、ΔkI、ΔkD为输出,如图2所示。那么,PID控制器输出的参数kP、kI、kD为式(2)~(4)所示;其中,kP′、kI′、kD′为预整定值。
kP=kP′+ΔkP
(2)
kI=kI′+ΔkI
(3)
kD=kD′+ΔkD
(4)
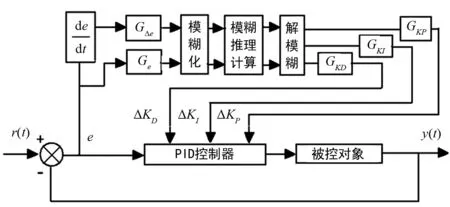
图2 参数自调整模糊PID控制原理图
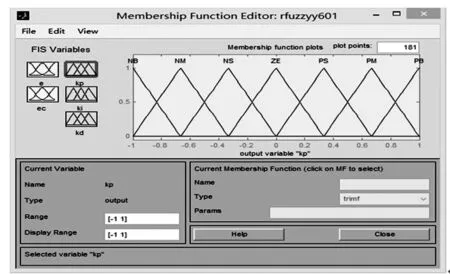
图3 隶属度函数曲线
模糊控制器的输入和输出均用语言子集{负大,负中,负小,零,正小,正中,正大}来表示,即{FD,FZ,FX,O,ZX,ZZ,ZD},建立合适的模糊控制规则,建立的规则集共49条,如表1~3所列。模糊变量误差、误差变化、控制量的模糊论域均为[-3,3],调整系数的模糊论域均为[-1,1],然后计算出各量化因子。控制器的输入和输出变量的隶属度函数选用三角形隶属度函数,应用MATLAB中的Fuzzy工具箱来设计函数曲线,如图3所示。
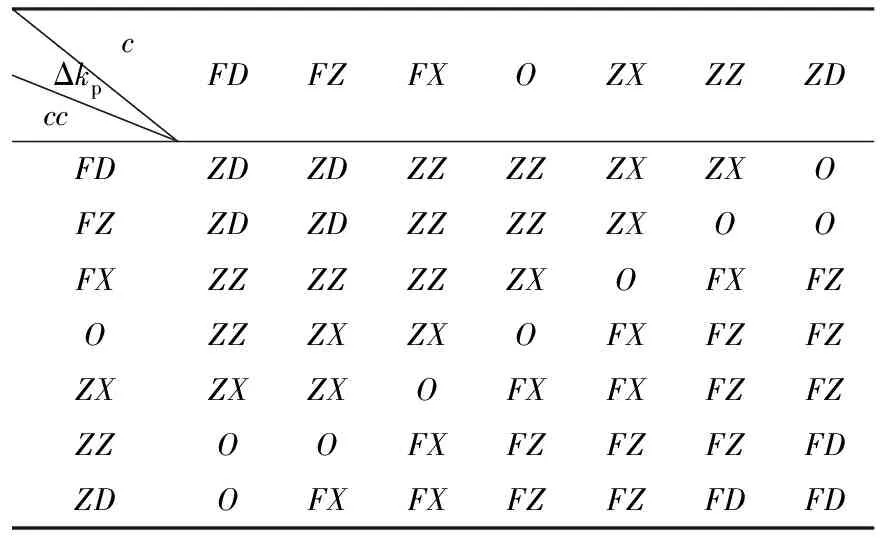
表1 Δkp的模糊控制规则表
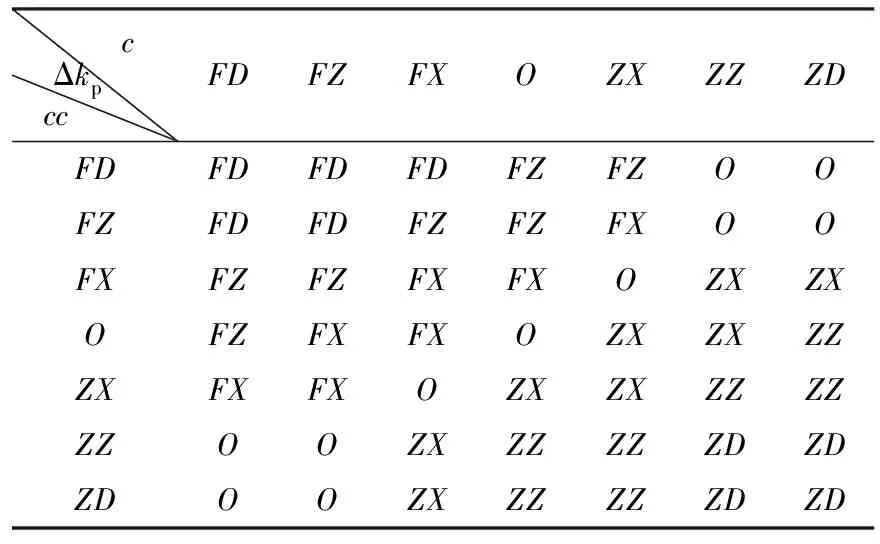
表2 ΔkI的模糊控制规则表
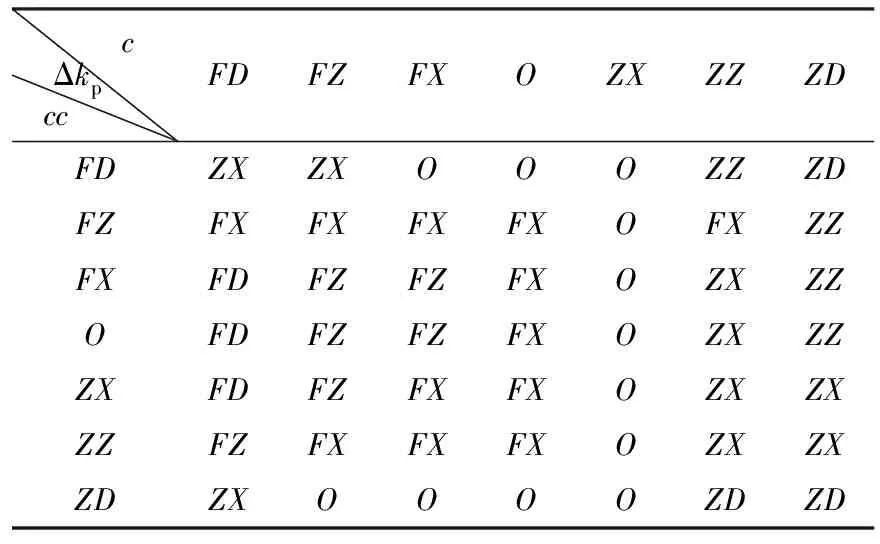
表3 ΔkD的模糊控制规则表
3 仿真结果与比较

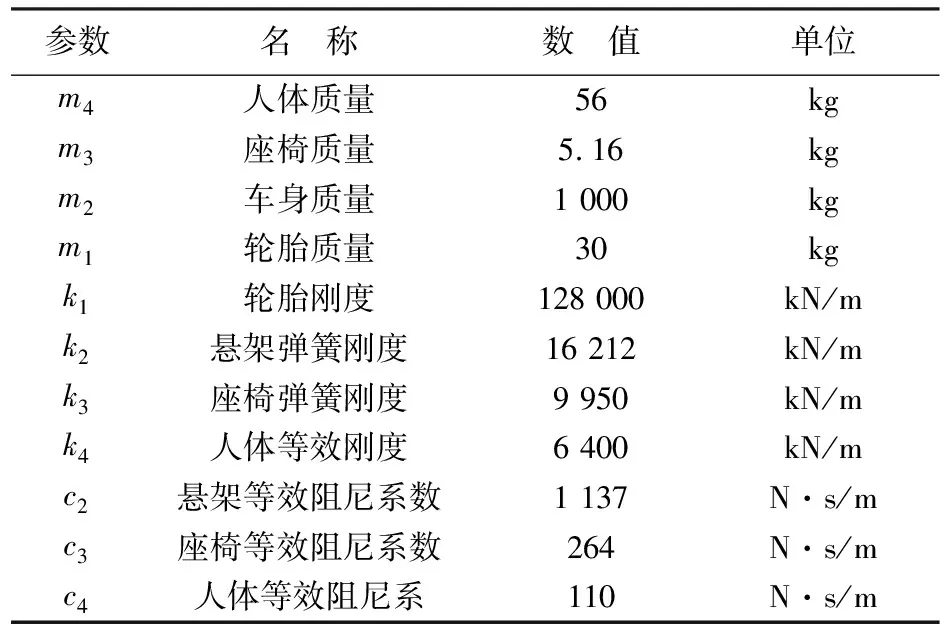
表4 车辆的基本参数
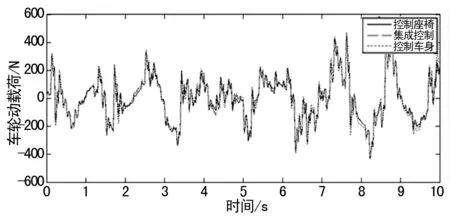
图4 车轮动载荷随时间的变化图
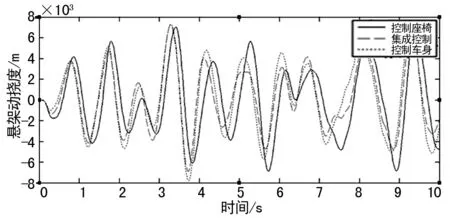
图5 悬架动挠度随时间的变化图
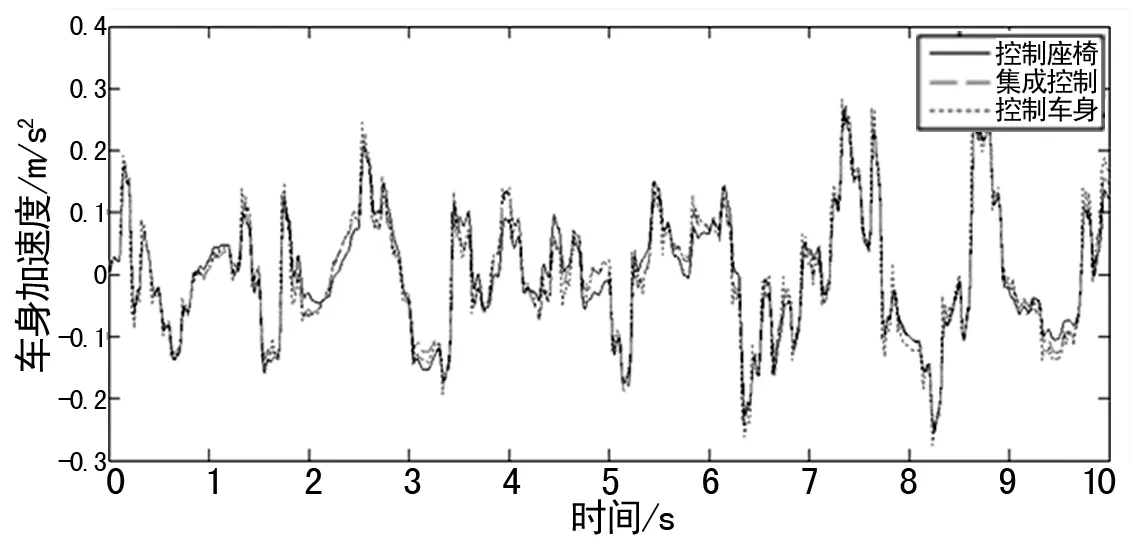
图6 车身加速度随时间的变化图
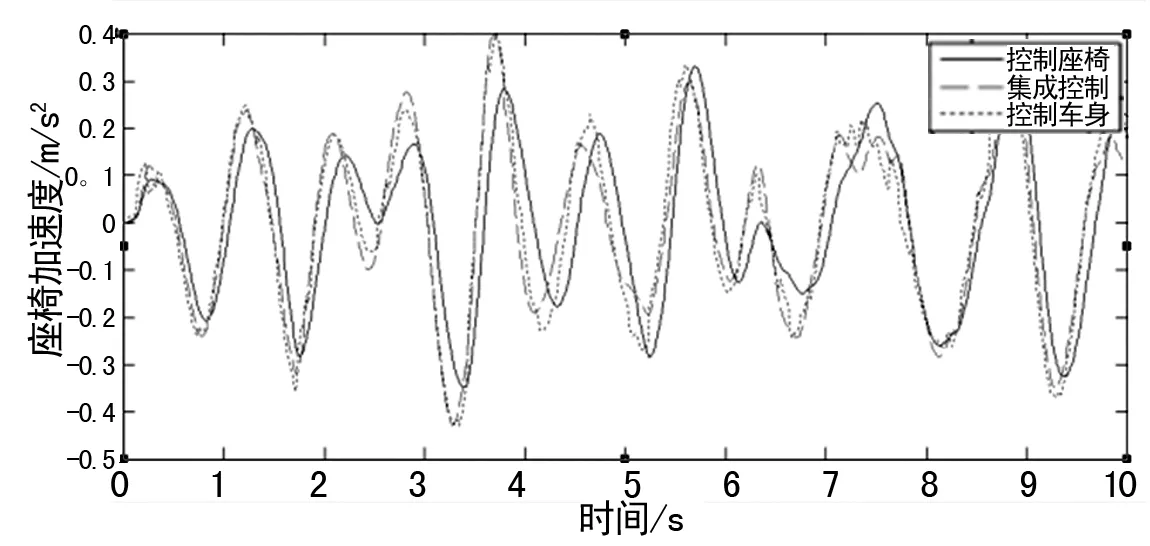
图7 座椅加速度随时间的变化图
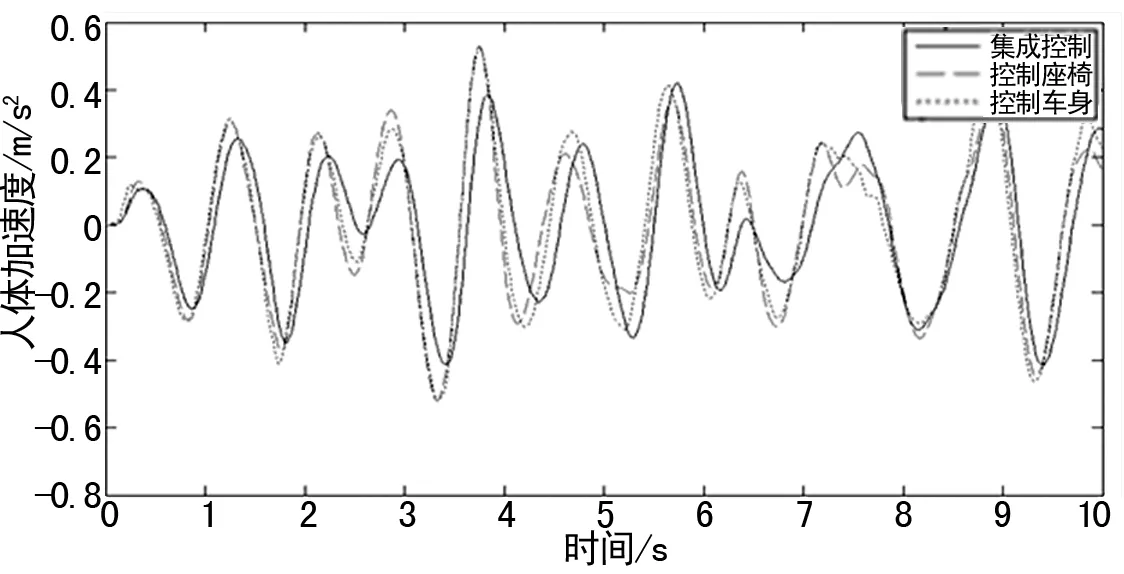
图8 人体加速度随时间的变化图
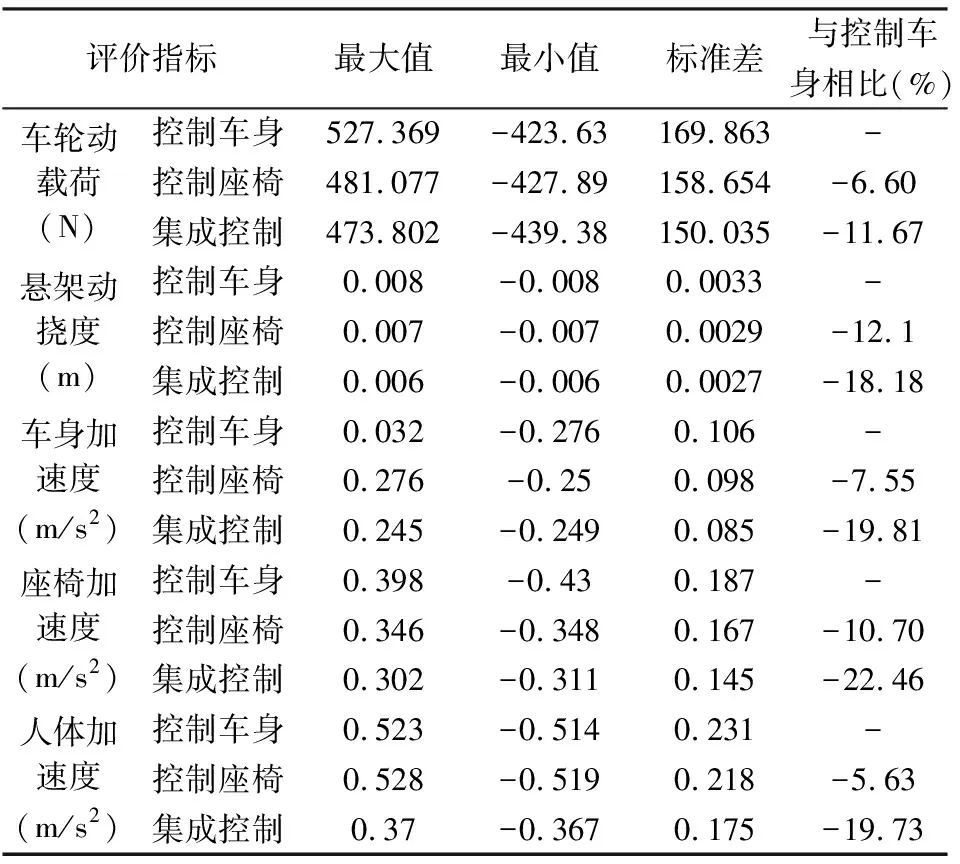
表5 性能改善分析表
从表5中可以看出,与以车身控制、座椅控制相比,集成控制的车轮动载荷降低了11.67%、悬架动挠度减小了18.18%、车身加速度减小了19.81%、座椅加速度减小了22.46%、人体加速度减小了19.73%,提高了汽车的操纵稳定性和行驶平顺性。
4 结 论
针对车辆座椅和悬架系统向集成化方向发展,提出了参数自调整模糊PID控制策略,通过仿真得出以下及结论。
(1) 融合模糊理论和PID设计的模糊PID控制器可以参数自整定,控制的效果好。
(2) 与分别以车身和座椅为控制目标相比较,集成控制更能减少车轮动载荷、悬架动挠度、车身加速度、座椅加速度和人体加速度;明显的改善了汽车的行驶平顺性和操纵稳定性。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
汽车维修与保养(2021年8期)2021-02-16
北京汽车(2016年6期)2016-10-13
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
故事作文·低年级(2016年7期)2016-05-14
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
现代制造技术与装备(2015年4期)2015-12-23
汽车维护与修理(2015年7期)2015-02-28
