
垃圾车机械手运动学特性分析
2020-05-18 09:11伍丽娜郑华康
机械工程与自动化 2020年2期
伍丽娜,陈 韬,张 凯,郑华康
(中汽研汽车检验中心(武汉)有限公司, 湖北 武汉 430056)
0 引言
侧装式垃圾车在智慧环卫系统中发挥着重要的作用,机械手是垃圾车装载作业中的关键部件,其可以在一定范围内对垃圾桶进行自动精准的抓取、上料、倾倒,实现装载垃圾的自动化操作,减少环卫作业人工成本,提高作业效率。上料机械手运动学特性直接影响整个作业过程的可靠性,其中提升工况尤为重要,垃圾桶重心、关键部件运动轨迹变化以及运动速度变化规律等均为结构设计中的关注点。本文以上料机械手3D设计模型为基础,运用ADAMS仿真软件对提升工况进行仿真分析,得到上料机械手提升过程中齿轮中心运动速度变化规律及垃圾桶重心运动轨迹,并将结果与理论计算进行对比,以验证结构设计的合理性。
1 机械手的机构运动学分析
1.1 垃圾车机械手工作原理
图1为机械手3D模型,图2为机械手结构组成。机械手进行垃圾倾倒作业时,主要分为以下三个阶段:①机械手侧向滑动伸出;②机械抓手定位垃圾桶并抓紧;③机械抓手及垃圾桶在提升马达作用下沿导轨向上滑动,完成垃圾倾倒作业。
1.2 提升齿轮中心运动速度计算
上料机械手提升阶段是利用齿轮齿条啮合结构完成,在分析提升齿轮中心运动速度规律时,依据齿轮啮合原理进行简化,并对整个啮合过程进行分析。齿轮啮合简图如图3所示,齿轮中心运动简图如图4所示。
由齿轮啮合原理可知,在节圆处两齿轮线速度相等,即:
r1ω1=r2ω2.
(1)
其中:r1为从动齿轮节圆半径;ω1为从动齿轮角速度;r2为驱动齿轮节圆半径;ω2为驱动齿轮角速度。

图1 机械手3D模型

1-固定伸缩导轨;2-缩进装置;3-伸缩臂;4-导向机构;5-抓手安装座;6-提升马达;7-机械抓手
为了计算驱动齿轮中心的速度,即O2点的线速度v2,可将图3简化为图4,即将O1点固定铰接,杆O1O2可以绕O1以ω1转动。因此:
v2=(r1+r2)ω1.
(2)
将式(1)代入式(2)得:
(3)
(1) 齿轮中心线速度状态一:上料机构在竖直阶段运动时,即r1趋向于∞。将数值代入式(3)得:
v2=r2ω2.
(4)
设r2=80 mm,提升马达设计转速n1=2.2 r/s,ω2=2πn1=13.86 rad/s。将数值代入式(4)得:
v2=r2ω2=1.1 m/s.
(2) 齿轮中心线速度状态二:上料机构在弧形阶段运动时,即r1=308 mm。将数值代入式(3)得:
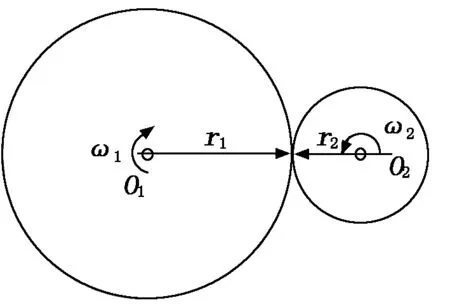
图3 齿轮啮合简图

图4 齿轮中心运动简图
1.3 机械手运动杆件模型建立
为了更好地简化模型算法,采用简单的建模方法,即基于运动学分析中的D-H方法完成机械正运动学问题,研究末端执行器即垃圾桶重心位置的运动轨迹。如图5所示,将机械手的每个杆件定义为Li,其中杆件Li在整个系统中坐标为{Xi,Yi,Zi}。整个机械手机构提升过程可以简化为两个关节运动,其中一个移动关节、一个旋转关节,设置于图2中件4与件5之间,垃圾桶重心位置的坐标系为{X3,Y3,Z3}。
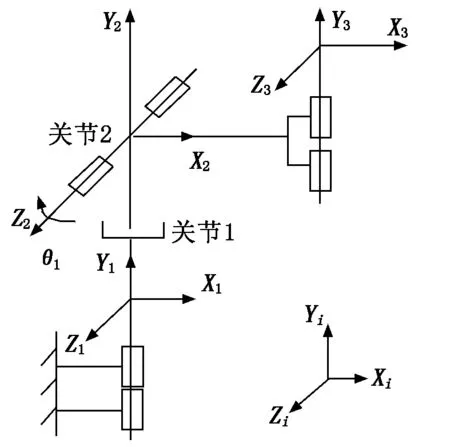
图5 机械手提升过程杆件坐标系
2 运动学仿真分析
2.1 虚拟样机模型建立
虚拟样机技术是一种基于虚拟样机的数字化设计方法,在工程中的应用是通过界面友好、功能强大、性能稳定的商业化虚拟样机软件实现的。目前,在国际上比较有影响力的虚拟样机分析软件有美国MSC公司的ADAMS、比利时LMS公司的DADS等[1]。本文采用ADAMS软件进行虚拟样机的建立,其分析流程如图6所示[2]。
2.1.1 样机模型导入
三维几何实体为了无限接近真实的产品,会添加许多配合关系。而机械系统动力学的研究注重约束和驱动,所以对模型施加前处理很重要,以简化三维实体模型[3-5]。本文所研究内容为上料机构的动态特性,即研究机械手成功抓取垃圾桶后的上料倾倒过程的动态特性。因此,在模型导入时,将垃圾桶与抓手、挂架部件作为整体部件导入到ADAMS中;将伸缩臂简化,与导轨作为整体导入;驱动齿轮作为一个单独部件导入;挂架上的四个滑动滚轮也分别以一个单独部件导入虚拟样机中,最终完成了样机模型的导入。
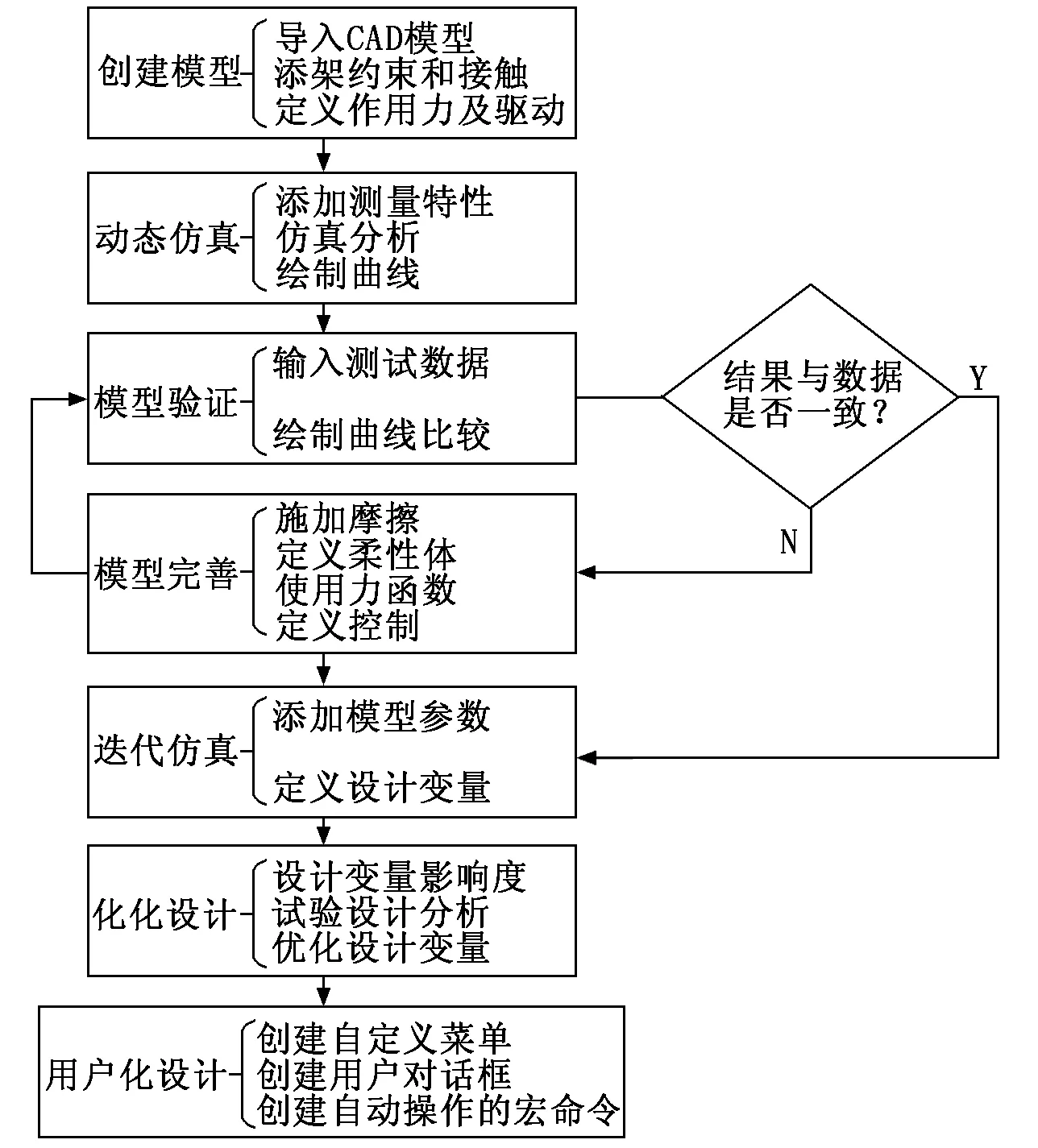
图6 ADAMS软件虚拟样机分析流程
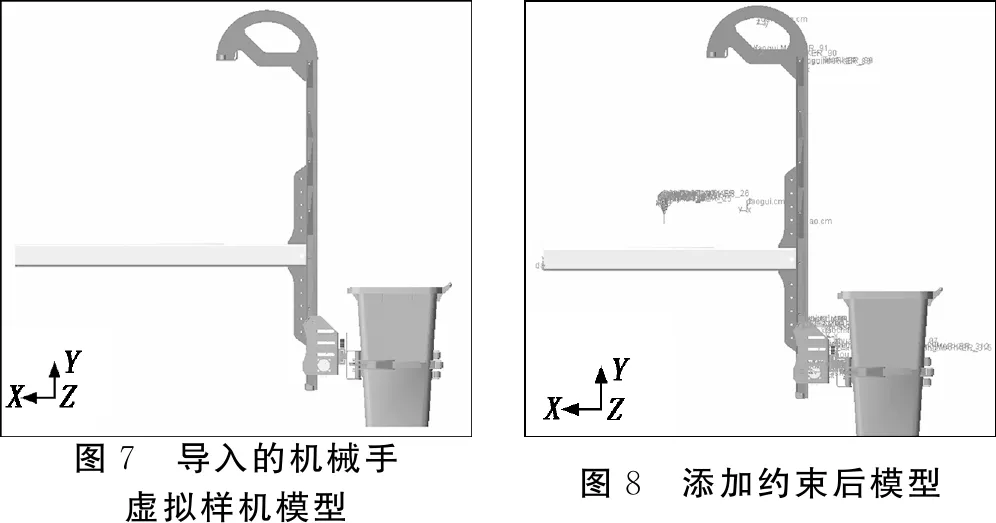
为了更快捷地进行运动学和动力学特性分析,定义标准坐标系,本分析中定义X轴为与机械手伸缩方向平行,Y轴为与垃圾桶提升方向平行,Z轴为与车辆行驶方向平行(车辆模型未导入样机中),所建立的虚拟样机模型如图7所示。
2.1.2 运动约束及驱动添加
以本文主要研究内容为依据对虚拟样机模型施加运动副约束、接触以及添加驱动,以此将不同构件连接起来构成一个机构系统。添加约束后的虚拟模型如图8所示,具体的运动副约束及接触如表1所示。
2.1.3 施加驱动及载荷
为了使机构系统完成运动学和动力学模拟仿真,需要对样机模型施加驱动及载荷。分析这个垃圾倾倒过程,其驱动力源自驱动齿轮的旋转,进而带动垃圾桶沿导轨滑动。本文在驱动齿轮的运动副处添加驱动,已知驱动齿轮旋转的马达设计转速为2.2 r/s,换算成角度为792°/s,因此,定义驱动函数为792 d,添加在齿轮与挂架之间的旋转副上。
本文研究内容为垃圾车机械手抓取垃圾桶后的垃圾倾倒过程的动态特性,所受载荷主要来源于垃圾桶内的垃圾,模型中模拟的垃圾桶为240 L,垃圾装满后重量为120 kg,即满载垃圾桶所受重力为1 200 N。分析动作过程如下:在提升阶段,垃圾桶整体重量是不变的;当进入弧形阶段后,垃圾桶开始倾斜,垃圾桶内垃圾会倒出,直至机械手沿弧形阶段运动完成时,垃圾倾倒完毕,此刻载荷为0 kg。假设机械手在弧形阶段运行开始于第2.1 s,结束于2.2 s,因此,在垃圾桶质心位置施加一个STEP函数:
STEP(time,2.1,1 200,2.2,0)

表1 上料机械手运动副及接触
2.2 运动学仿真分析
运动学分析的目的是仅从几何学的角度,研究各构件上特定位置的运动参数——位移、速度、加速度等。为了直观地表示机械手上料过程中的运动特性,仿真结束后测量得到了驱动齿轮中心的速度变化曲线和驱动齿轮中心及垃圾桶质心运动轨迹,如图9、图10所示。
由图9可以看出:在整个提升过程中,机构处于竖直轨道时,驱动齿轮中心的速度维持恒定值1.1 m/s
(注:本文设定的驱动马达保持恒定转速运动);进入弧形阶段后,由于相对坐标系的变化,造成驱动齿轮中心处的速度发生变化,其值为维持在1.4 m/s左右波动。仿真结果与本文1.2小节理论计算相吻合。由图10可以看出:驱动齿轮中心及垃圾桶质心的运动轨迹基本都沿着轨道的形状运动,在直线段与弧形段相衔接部分会有轻微的冲击变化,这是因为机构受力情况发生改变,轨迹出现轻微变化。
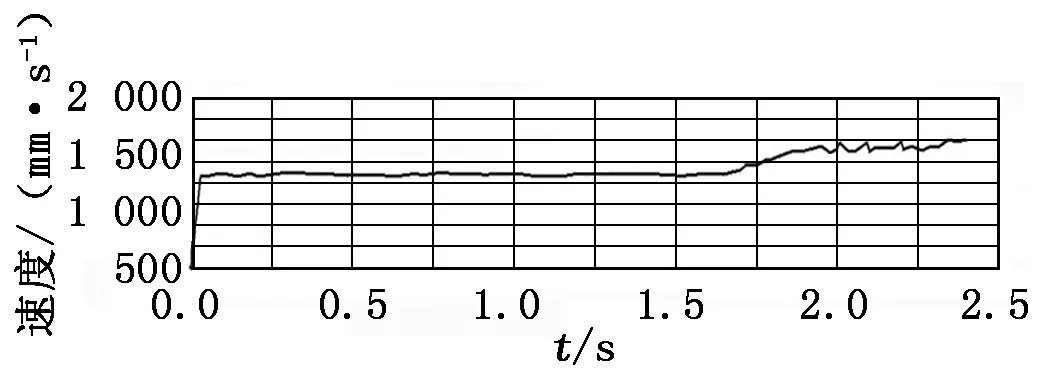
图9 驱动齿轮中心速度变化曲线

图10 驱动齿轮中心及垃圾桶质心运动轨迹
3 结论
本文以上料机械手的上料过程为研究对象,以理论计算的方式得到运动部件的运动特性,结合仿真分析手段,进一步验证了理论计算的合理性,并且较为直观地展示了垃圾桶质心及齿轮中心的运动轨迹。本文一方面采用理论计算与仿真分析相结合的方式验证了结构设计的合理性,另一方面研究了结构部件的运动特性,为后期零件选型提供了理论依据。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
中国棉花(2017年10期)2017-11-04
制造技术与机床(2017年4期)2017-06-22
