基于PLC的水池控制系统设计
2020-05-18 09:11:26张鑫力高振博
机械工程与自动化 2020年2期
赵 瑞,张鑫力,高振博
(哈尔滨理工大学荣成学院,山东 威海 264300)
0 引言
随着社会的发展和人民生活水平的提高,用水需求不断增长,在使用水资源的过程中,因人为因素等造成的水资源浪费情况也随之增多。因此,本文将基于PLC设计出一套可自动控制液体流量的双水池控制系统,以减少水资源的浪费。
1 水池控制系统工作原理与流程
1.1 工作原理
首先调节液位开关高度,设定系统运行条件,然后按下启动按钮后,出水阀出水,达到中间抽水泵的接通条件时中间抽水泵开始抽水,达到右侧抽水泵的接通条件时右侧抽水泵开始抽水,达到相应的断开条件时各被控对象断开。在设备运行过程中,无论何时出现了错误,均会立即引发报警中断程序,点亮故障指示灯,同时PLC也会转为STOP状态使运动停止。
1.2 工作流程
1.2.1 设定系统运行条件
(1) 出水阀的接通和断开条件:
接通:按下启动按钮。
断开:左侧水池液面到达高限位开关或出水时间达到5 min。
(2) 中间抽水泵的接通和断开条件:
接通:左侧水池液面到达高液位开关或低液位开关接通5 s后。
断开:左侧水池液面到达低液位开关位置或右侧水池液面到达高液位开关。
(3) 右侧抽水泵的接通和断开条件:
接通:右侧水池液面到达高液位开关或低液位开关接通5 s后。
断开:液面到达低液位开关10 s后。
1.2.2 系统工作方式
根据设定的系统运行条件得到水池控制系统顺序功能图如图1所示。
在希拉里的败选演讲中,希拉里作为演讲者对于语气表达的选择并不一定需要遵循一致式,如果能巧妙使用语气隐喻式的表达,那对于演讲者来说无疑是更有利的。在希拉里的这篇演讲者中所使用的皆为陈述语气和祈使语气,没有用到疑问语气。因此,本文将主要从陈述语气隐喻和祈使语气隐喻两个角度来探析希拉里的这篇败选演讲。
2 控制系统硬件设计
2.1 CPU选型
根据控制系统的控制要求和实际条件,可计算出现场输入信号7个,输出信号3个,因此选用S7-200系列 CPU 222,CPU222可以实现8点输入、6点输出的控制[1],因此在水池控制系统中使用尚有裕量,可供备用。 PLC输入回路中,信号电源由PLC和扩展模块本身的24 V直流电源提供;输出回路采用继电器输出,每个输出点额定控制容量为AC220 V,2 A。
2.2 外部接线和I/O口分配
控制电路中,选用220 V两相交流电源作为PLC的供电电源,同时给输出电路供电,选用24 V直流电源给PLC输入端供电,最终控制部分的电气接线与I/O口分配分别如图2和表1所示。
2.3 系统主电路设计
根据水池的控制要求,选用380 V三相四线交流电源给两个水泵和一个电磁水阀供电[2]。电路开关选用刀闸开关,电路接触器采用CJ20系列CJ20-20,其主触点额定电压为380 V、线圈额定电压为220 V;电路熔断器采用NT系列的NT00型组合熔断器,额定电压为380 V[3],并采用了热继电器。
3 控制系统软件设计
3.1 定时交互系统
本系统选用昆仑通态TPC7062TX型号的7寸触摸屏来作为交互端[4]。在各元件与PLC之间建立数据链接,实现对运行状态的控制与实时监控[5]。最终
可完成简单的人机交互界面,通过交互界面设定系统的工作时间,以适应不同工作环境的工作需求。交互界面如图3所示。
3.2 液面检测系统
采用浮球液位开关检测水位,通过电机齿轮链条组合控制浮球液位开关上下移动。可通过交互界面设定浮球液位开关高度,以检测不同水位,实现设定的工作要求。

图1 水池控制系统顺序功能图

图2 控制系统接线原理

表1 控制系统I/O分配
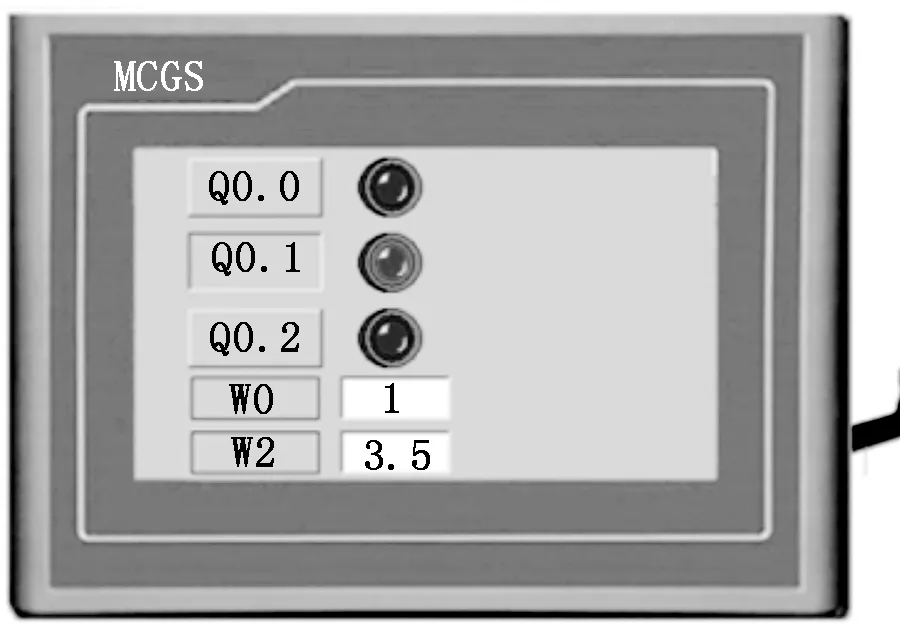
图3 交互界面图
3.3 PID控制系统的改进
利用PID对控制系统进行改进,当液位距目标值较远时,水阀和水泵将完全打开;接近目标位置时其将以缓慢速度精准停在目标液位。而且通过收集水底压力传感器测量的数据,不断调整PID参数,从而达到最快响应及节水的要求。其运行结果如图4所示。
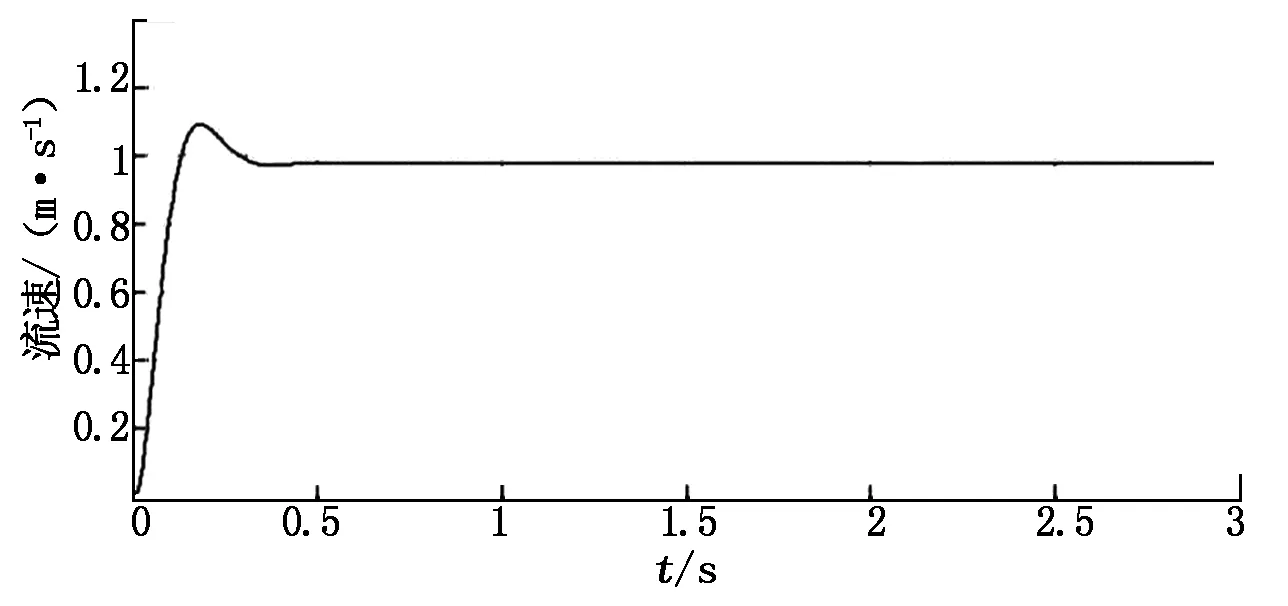
图4 PID控制器仿真结果
从图4中可以看出:经PID改进后,系统的稳态误差不大于0.1,超调量小于20%,调节时间不大于0.5 s。说明PID改进是有效的。
4 组态仿真
4.1 硬件调试
建立水池控制系统的仿真模型,通过宇龙机电控制仿真软件V3.8进行仿真分析,仿真模型如图5所示。
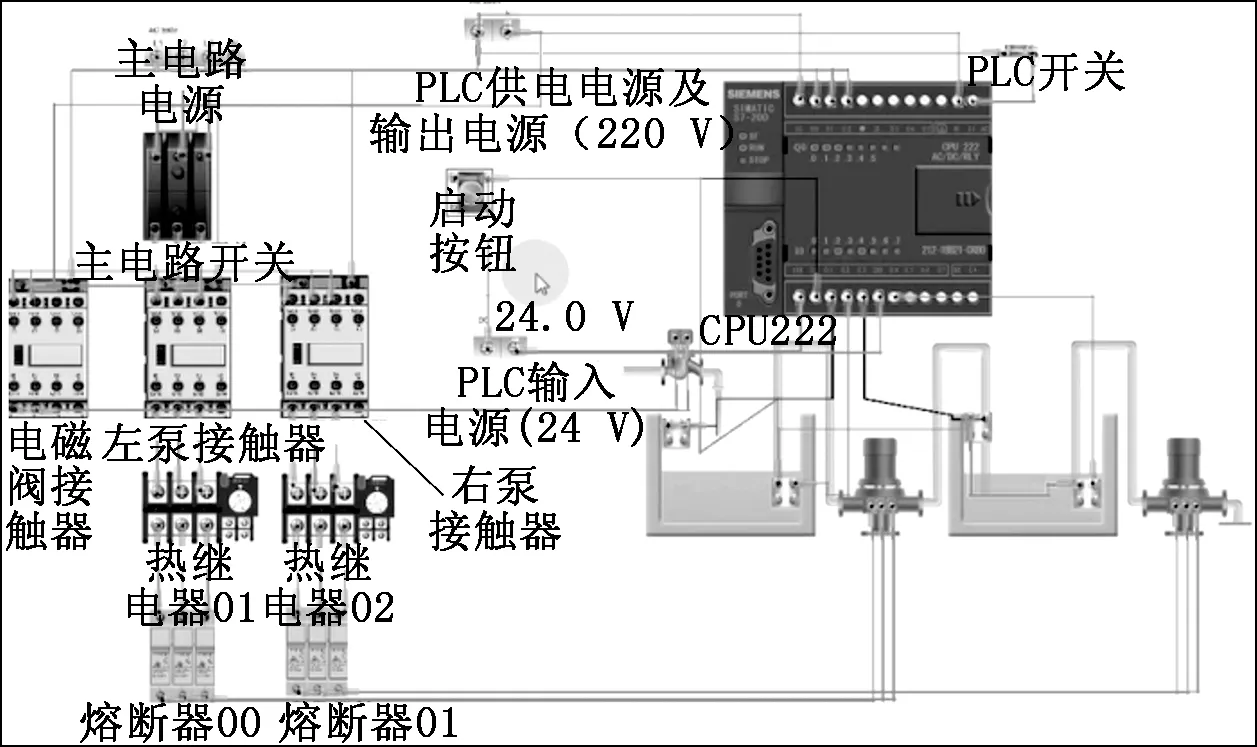
图5 水池控制系统仿真模型
4.2 软件调试
打开宇龙仿真软件,选择S7-200系列CPU 222,在其内部编辑梯形图程序,按照设定的系统要求进行软件仿真,运行过程按照如图1所示的顺序功能图准确进行,结果准确,满足使用要求。功能图左侧流程调试结果如图6所示。
5 结论
本文设计的双水池控制系统选用西门子S7-200 PLC
系列CPU 222模块作为控制核心,操作简便,可以满足不同工作环境的需求,具有较好的通用性和灵活性,避免了水资源的使用受人为等因素的制约,有效地提高了水资源的利用率,减少了水资源的浪费。
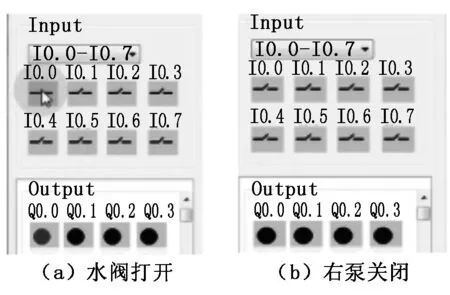
图6 功能图左侧流程调试结果图
猜你喜欢
山东农机化(2023年6期)2024-01-10 06:48:16
动漫界·幼教365(大班)(2019年10期)2019-10-28 01:54:09
阅读(科学探秘)(2019年4期)2019-06-19 01:13:34
电子测试(2018年6期)2018-05-09 07:31:47
上海煤气(2018年6期)2018-03-07 01:03:24
科学与财富(2017年24期)2017-09-06 05:02:47
科技与创新(2016年2期)2016-01-19 11:23:29
水力发电(2014年7期)2014-10-21 02:01:38
河南科技(2014年14期)2014-02-27 14:11:57
中国新技术新产品(2013年20期)2013-11-16 06:27:46