用于共聚焦显微镜物镜微调压电Z轴定位平台设计
2020-05-18 11:39:30王海军刘正锋李明雨
仪表技术与传感器 2020年4期
王海军,路 崧,刘正锋,李明雨
(1.中国飞机强度研究所,陕西西安 710000;2.大族激光科技股份有限公司,广东深圳 518057;3.哈尔滨工业大学,广东深圳 518057)
0 引言
共聚焦显微镜作为一种具有原子级高分辨率的新型仪器,可以在正常环境下对样品进行纳米区域的形貌测量,现已广泛应用于半导体晶元切割、生物医药、纳米功能材料等高科技领域,成为光学显微与成像领域中研究的基本工具。其中投影物镜是原子力显微镜的核心部件,其具有小型化、精度高等特点。基于压电驱动的纳米定位技术在超精密加工、生物医药、超分辨率显微镜等高端制造工业得到广泛应用[1-2]。
压电陶瓷具有超分辨率、高精度、响应速度快等特点,但是其输出位移小,不能直接应用于生产制造中[3]。因此对压电陶瓷放大结构的研究变得尤为重要。柔性铰链具有结构紧凑、体积小且无机械摩擦等特点,是压电驱动放大装置设计的关键,对柔性铰链的研究非常有意义[4]。
国内外对压电位移放大平台[5-9]和基于压电放大的流体泵阀进行研究比较多,对于基于压电位移放大的光学物镜定位平台[10]几乎没有研究。利用压电位移平台和镜头进行装配组合一起的压电放大式物镜定位系统会造成整体尺寸大,影响应定位速度,装配误差也会造成物镜运动过程产生误差。
针对光刻机投影物镜的高精度成像及小型化的特定应用,本文设计了一个高线性度的、微小型的压电陶瓷驱动Z轴物镜定位平台。采用倒圆角直梁型柔性铰链作为单平行四杆导向机构的传动部分,并对倒圆角直梁型柔性铰链和平台的系统刚度值进行计算,利用ANSYS对物镜定位平台进行静力学、模态、动态响应分析,得到物镜工作台的谐振频率和一阶振型以及阶跃响应时间,最终通过实验验证了设计出来的物镜定位平台可以满足实际应用场景使用的需求。
1 物镜定位平台的设计
通用的纳米定位平台体积占用较大,输出位移为100 μm的情况下,平台规格一般在140 mm×200 mm×30 mm以上,对于在原子力显微镜检测系统光学成像物镜中的特定应用,安装时极易出现空间不够的情况,本文设计的压电Z轴物镜定位平台整体结构尺寸为35 mm×35 mm×60 mm,仅为通用纳米定位平台所占空间的1/10,且调焦速度和精度在精密电动平台的10倍以上。铰链主体材料为铝合金7075-T6,有效减轻平台质量。结构原理如图1所示,采用5 mm×5 mm×36 mm裸装压电叠堆为动力驱动,利用倒圆角直梁型柔性铰链作为传动副,单平行四杆结构作为放大结构,物镜安装面的输出位移得到有效放大。
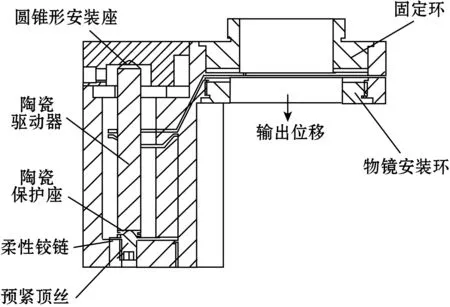
图1 物镜定位台剖面示意图
平台主体通过线切割加工而成,压电陶瓷两端面与陶瓷保护座之间用环氧树脂进行粘接,陶瓷保护座与安装座之间为点接触,避免陶瓷受到横向切应力而破损。物镜安装环通过分立式螺纹与物镜连接。应用8.8级不锈钢预紧顶丝对压电陶瓷提供有效预紧力,增大系统刚度,提高谐振频率。
1.1 倒圆角直梁型柔性铰链的刚度计算
倒圆角直梁型柔性铰链是一种新型的复合柔性铰链,其具有圆弧型柔性铰链的运动精度高、直梁型柔性铰链运动范围大的综合优势[11-13]。柔性铰链的主要结构参数为宽度b、最小厚度t、最大厚度h、倒圆角半径R、直梁部分长度L。
由文献[10]可知,倒圆角直梁型柔性铰链的弯曲刚度k1和拉伸/压缩刚度k2分别为:
(1)
(2)
式中:Mz为力矩;E为铰链材料的弹性模量;Fx为铰链在x方向受到的力;Δl为铰链在x方向的变形量;
c=R/t。
1.2 物镜定位平台的输出位移计算
将物镜铰链主体模型进行简化得到平行四杆机构模型和铰链拉伸/压缩的模型,如图2、图3所示。

图2 单平行四杆机构模型
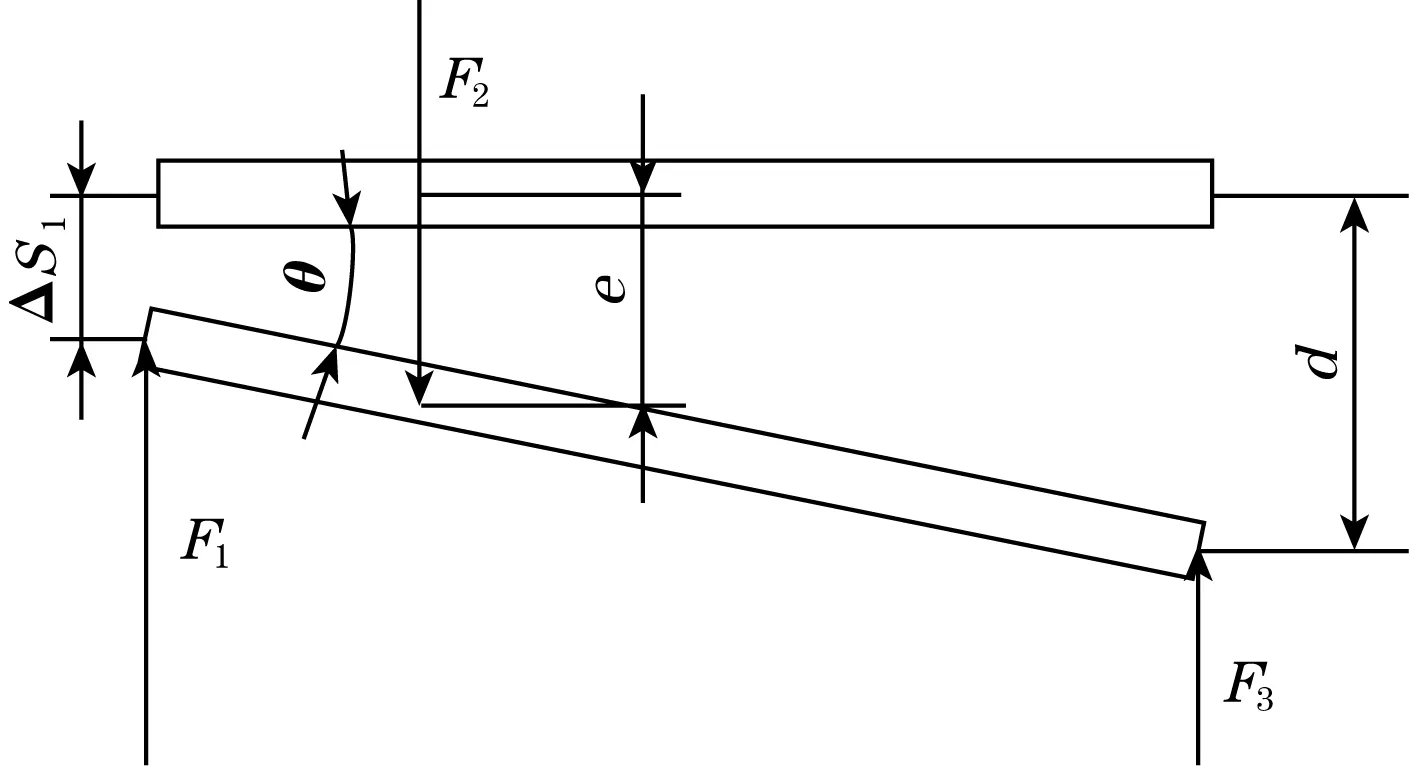
图3 考虑铰链拉伸/压缩的杠杆模型
由图2可知,物镜定位平台单平行四杆机构中的放大倍数n可以表示为
n=L/A
(3)
式中:L为铰链3到铰链1的距离;A为铰链2到铰链1的距离。
当压电陶瓷的输出位移为dP时,通过单平行四杆机构进行放大后,实际输出端位移为d表示为
d=dP·n
(4)
在实际工作过程中,柔性铰链在产生转角变形的同时会产生压缩和拉伸的弹性变形,从而输出的实际位移与上述有较大差异。
考虑到直梁型柔性铰链的转角刚度以及拉伸/压缩变形[14],根据图3,杠杆机构的实际输出位移d为
d=Δs1+n(e-Δs1)
(5)
式中:Δs1为铰链1的压缩变形;Δs3为铰链3的压缩变形;e为压电陶瓷推动杠杆时的实际位移。
e=dP-Δs3
(6)
根据杠杆平衡原理得:
F1A=F3(L-A)+(K21+K22+K23)θ
(7)
式中:F1、F2、F3分别为铰链1、铰链2、铰链3处受到的拉力;k21、k22、k23分别铰链1、铰链2、铰链3处的压缩刚度。
根据材料学公式:
F1=k21Δs1
(8)
F3=k23Δs3
(9)
由式(3)、式(5)、式(6)、式(7)及式(8)计算得,结构的实际输出位移为
(10)
(11)
(12)
本文设计物镜工作台铰链尺寸中,A=4.5 mm,L=13.5 mm,则物镜工作台输出端的位移的理论值为d=0.111 mm。
1.3 物镜定位平台的系统刚度设计
选用的陶瓷尺寸规格为5 mm×5 mm×36 mm,其额定推力为1 900 N,标称位移为36 μm,陶瓷刚度KP为25 N/μm,由于压电陶瓷不能受到拉应力及横向切应力,需要对压电陶瓷施加预紧力以防止陶瓷工作时受到破坏,本文采用预紧顶丝对陶瓷施加预紧力。由于施加的预紧力会影响系统刚度KS,系统刚度KS会影响到陶瓷产生的最大位移。在施加预紧力后的陶瓷产生的位移dP为
(13)
式中:KP为陶瓷刚度;KS为系统刚度。
为了保证陶瓷产生的位移,系统刚度要在陶瓷刚度的1/10以下。系统刚度Kmax为
(14)
2 微动平台的静力学/动力学仿真分析
该平台使用的铰链主体为超硬铝。压电陶瓷产生微小位移时柔性铰链产生弹性变形,为保证平台铰链最大变形在弹性变形范围内,需要进行静应力分析;由于物镜定位平台用于超分辨率显微镜的高动态聚焦,平台的设计最大工作频率为150 Hz左右,因此设计的物镜平台固有频率要至少在工作频率的3倍以上,即最好不小于450 Hz[11]。
2.1 有限元静力学分析
柔性铰链在受到压电陶瓷的推力时产生弹性变形,经过平行四杆机构的线性放大后,输出端的位移较大。用ANSYS对物镜定位平台进行分析时,在Workbench界面中定义平台的材料参数并划分网格。网格节点数为337 714、网格单元数为110 561,对物镜安装面施加固定约束以及对陶瓷安装面受力点施加位移约束0.036 mm。
仿真结果如图4所示,物镜台使用材料为铝合金,在柔性铰链产生最大应力为274.66 MPa,在输出端产生的Z轴最大位移为103.75 μm,x轴最大偏差为0.730 25 μm,计算系统放大倍数为2.88倍,Z向最大偏摆为0.006 9 rad。
当输入力为200 N时,系统输出端位移为d=97.768 μm,由此计算系统刚度k0为
k0=F/d=200/97.768=2.04 N/μm
(15)
由此可知k0<5.12 N/μm,不会明显影响到陶瓷的输出最大位移,物镜工作台最大应力小于铝合金的屈服强度600 MPa且输出位移大于100 μm,而且在材料弹性变形范围内,能够满足工作要求。
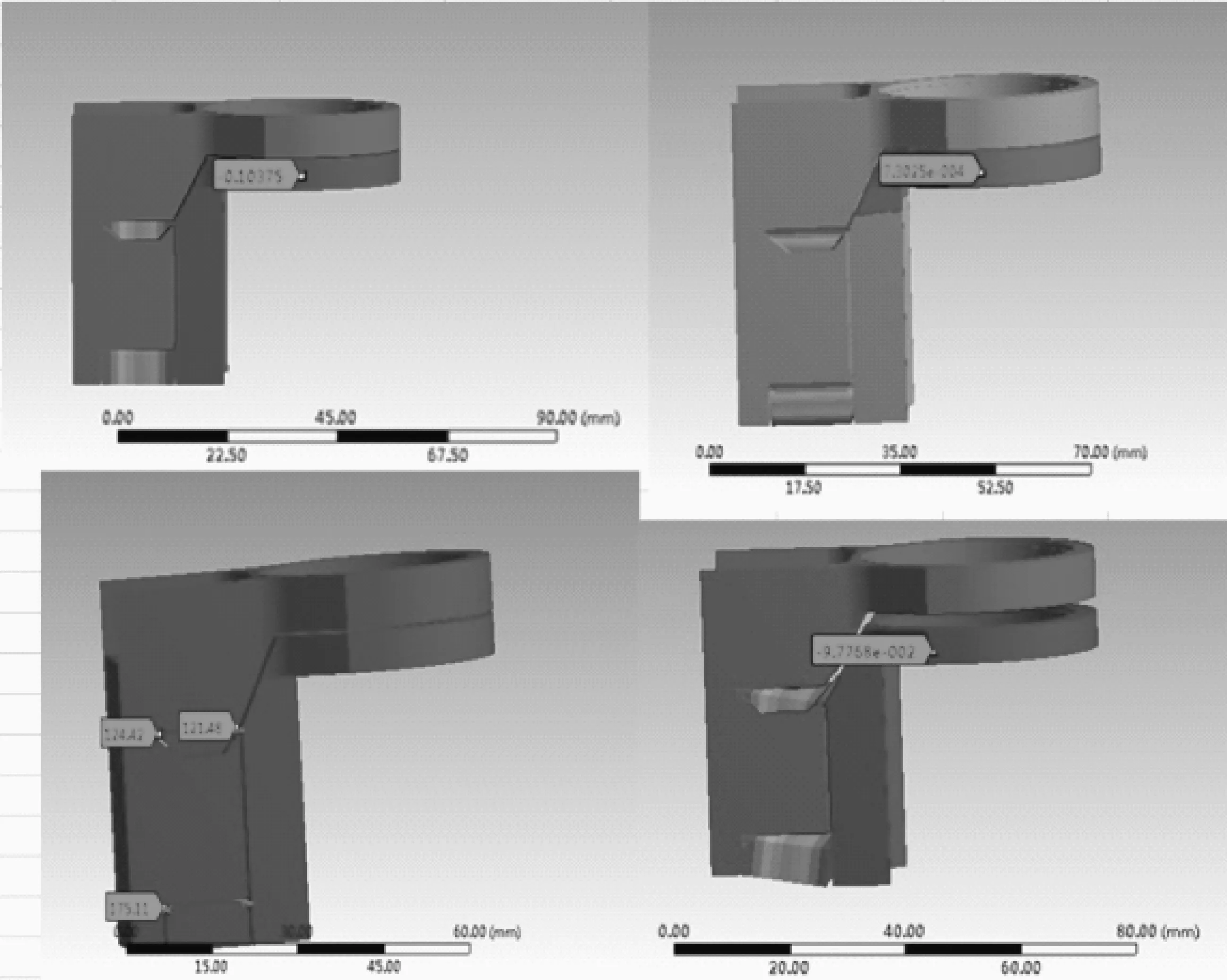
图4 物镜工作台仿真应力/应变云图
2.2 有限元模态学分析
设计物镜定位平台最大工作谐振频率为150 Hz,为保证物镜定位平台时的扫描的数据不产生畸变,定位平台的系统固有频率至少在工作使用频率的3倍以上,并且要求在低频时,幅频特性稳定。通过ANSYS进行模态仿真,系统模态分析的前6阶固有频率如表1所示。

表1 物镜台仿真前6阶固有频率 Hz
图5为物镜台1阶振型云图,频率为618.84 Hz,第6阶固有频率为3 000.5 Hz,超过3倍最大设计工作频率,满足工作要求。
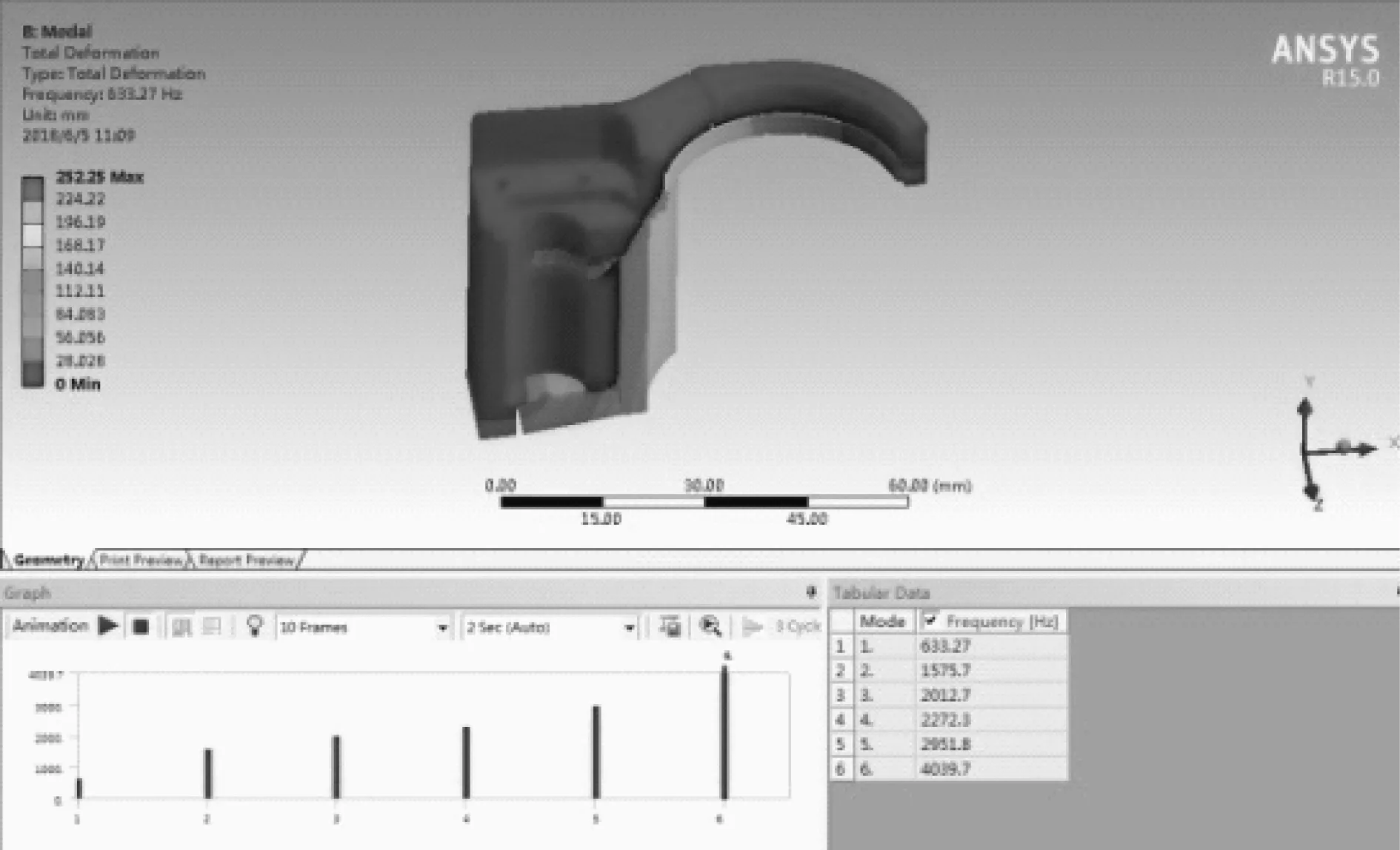
图5 物镜台1阶振型
3 实验测试
搭建了物镜工作台进行试验,通过BP-303压电控制器对压电陶瓷输入0~150 V电压斜坡信号,分辨率为0.5 mV。内置的应变片传感器测量压电陶瓷的实际位移,通过松下接触式位移传感器中的高精度光栅进行物镜定位台的Z轴输出位移开环标定测量。图6为物镜工作台输出端Z向位移测量结果与仿真数据/理论输出位移对比图,X轴表示压电陶瓷实际位移,Y轴表示输出位移值。

图6 位移测量结果/仿真数据/理论位移对比图
压电陶瓷实际最大位移为35.3 μm,物镜定位台实际测量最大位移为101.4 μm,实际位移放大比为101.4/35.3=2.88倍。实际位移与陶瓷位移成高线性相关,压电陶瓷的调节分辨率为0.01 nm,由于压电控制器BPC303最高调节分辨率为0.5 mV,即计算得物镜定位台的最高调节分辨率m为
(16)
即物镜定位台的调节分辨率为0.33 nm,满足光学领域应用需求。
4 结束语
本文采用硬铝合金,减轻了压电Z轴物镜定位台的质量,考虑倒圆角直梁型柔性铰链刚度,采用带有应变片传感器的压电陶瓷作为驱动,单平行四杆机构作为放大机构对压电陶瓷产生的位移进行高线性放大,减小了物镜台工作体积。通过力学仿真和模态分析,设计的物镜定位平台输出端Z向输出位移为101.4 μm;分析得物镜定位台最大轴向偏摆0.006 9 rad,最小调节分辨率为0.33 nm,系统谐振频率为633.27 Hz,满足工作使用要求。
猜你喜欢
科普童话·学霸日记(2021年11期)2021-05-30 10:48:04
民用飞机设计与研究(2019年2期)2019-08-05 01:33:44
压电与声光(2019年1期)2019-02-22 09:46:06
北京汽车(2019年6期)2019-02-12 05:19:50
汽车电器(2018年10期)2018-11-01 01:17:26
铜仁学院学报(2018年6期)2018-07-05 09:47:40
光学精密工程(2016年4期)2016-11-07 09:04:52
光学精密工程(2016年3期)2016-11-07 09:04:17
CHIP新电脑(2014年5期)2014-05-14 20:54:03
振动、测试与诊断(2014年6期)2014-03-01 01:14:55