积水条件下的坑道地形测量难点及解决方案
2020-05-17 06:14:02吴年丰
矿山测量 2020年2期
欧 乐,张 建,吴年丰
(1.海军南海工程设计院,广东 湛江 524005;2.中国电建集团青海省电力设计院有限公司,青海 西宁 810008;3.中国海警局直属第三局,广东 广州 520320)
上世纪六七十年代,为相应“深挖洞、广积粮、不称霸”的国家政策,全国各地建造了数量众多的人防坑道。随着世界格局的变化以及社会经济的发展,这些坑道已使用(或搁置)近半个世纪,不少坑道已覆土多年,坑道的安全性、可靠性都经受着考验。近年来,军队都在进行人防工程普查工作,对人防坑道的结构形式、尺寸、被覆等进行调查[1-3]。普查第一步就是要掌握坑道的平面布置,包括坑道在国家坐标系中的位置,以及其内部轮廓、走向,以及截面尺寸,由于年代久远,大多数坑道的建设资料已无法找到,必须进行详细测绘。
1 任务概况
海南省三亚市某人防坑道建于上世纪六七十年代,现如今多年未使用,坑道内积水、淤积严重,积水深处可达2 m(即灌满坑道)。当前因整改维修需要,需掌握坑道平面布置及地势情况。原始资料已无从查找,需进行重新测绘。因坑道积水,无法使用三维激光扫描技术[4],只能使用传统的数字测图方法[5]。
2 测绘实施
外业测绘流程图如图1所示。
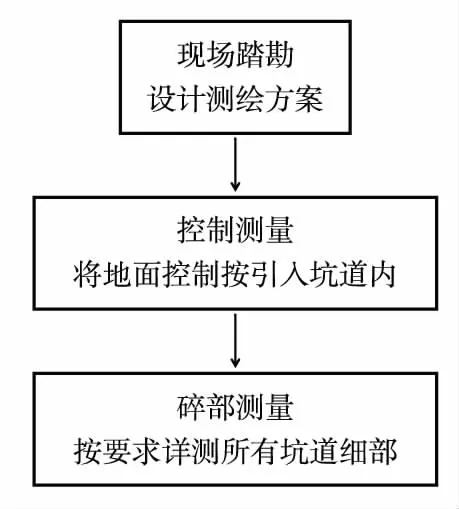
图1 外业测绘流程图
2.1 现场踏勘
对坑道现状进行了踏勘,绘制草图,查明所有坑道出口位置、结构形式以及通行能力。对坑道内部淤积、水深情况、水泵排水水位下降速率进行掌握,确定测绘时间窗口。制定测量方案。
2.2 控制测量
狭长的坑道除口部外全部处于地下,控制测量采用附合导线或直伸导线的方式。
(1)平面控制:在地面上的所有可通行出口附近,设置成对控制点,通过GNSS静态测量联测已知控制点,获得地面上的首级控制点成果。采用附合导线测量的方法,利用全站仪从坑道一口已知点(方位)测入,经若干坑道内图根转点,从另一口测出附合到已知点(方位),进行地面与坑道内的平面控制传递,完成次级控制,如图2所示,平差解算坑道内控制点坐标。
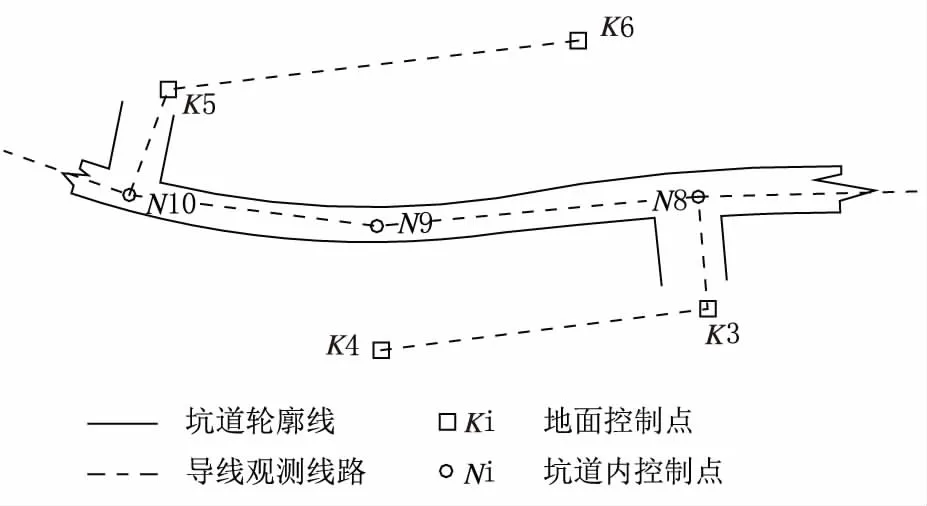
图2 导线测量示意图
(2)高程控制:因坑道内积水严重,部分地段全时段抽水,积水水位仍超过1 m,无法进行常规的水准测量。基于此,在导线测量过程中记录垂直角和水平距离,利用三角高程传递的方法进行坑道内传导高程[6-7],将地面高程基准引入坑道内,经平差解算各点高程。
2.3 碎部测量
依照1∶500地形图测绘要求,详细测绘坑道轮廓边线,坑道内所有地物、地貌。灵活采用光学反射棱镜、免棱镜测距激光的测点方法,获取准确的碎部点坐标。
2.4 截面测绘
在各个不同坑道截面及截面变化处进行截面测绘[8]。结合实地情况,选取免棱镜模式测特征点,手持式激光测距仪实测,以及钢卷尺实测等方法获取截面特征尺寸,包括截面宽、两侧起弧处高、拱顶高等。
3 困难及解决方案
3.1 入口处导线边长短
因入口处需经楼梯将导线引入坑道,导致此处的导线边长很短,部分测段该处边长仅有5 m。
仪器对中误差对水平角的影响已有论证[9],公式如下:
(1)
由上式可知,测角中误差m中与两目标之间的距离SAB与对中误差e的乘积成正比,与测站至目标的距离S1和S2的乘积成反比,距离越短,影响越大。
当坑道入口的导线转折测段长度无法增长,必须更加严格地对中、整平,适当增长衔接边边长,同时增加测回数,提高该测段的测角测距精度。
3.2 坑道内积水,设站困难
坑道经前期清淤后仍有多段积水,人员需着雨鞋(渔裤)进入施测区域,无法正常在坑道底板面做点设站,即无法保证对中。为此提前制作多个预埋钢筋的“设站墩”,以墩顶钢筋头刻画十字中心代替传统方法中地面的转点,如图3所示。
“设站墩”的制作要点:
(1)灰桶中浇筑满混凝土使墩子整体拥有较大的质量,保证墩子在水下稳定不易移位;
(2)使用螺纹钢筋,确保钢筋与灰桶中的混凝土完整固结,不易在搬动时被抽出;
(3)高度设置为1 m,保证该墩在全程使用过程中顶部钢筋头都可以露出水面。
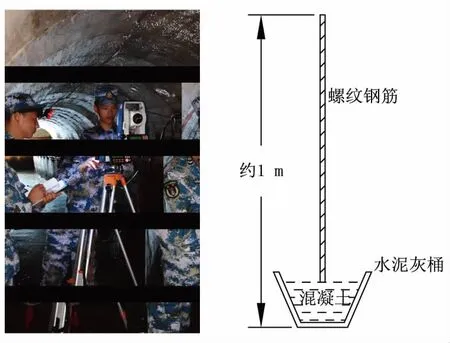
图3 “设站墩”示意图
由式(1)可知,测角中误差与对中误差e的成正比。经检验,利用设站墩法保障仪器对中的对中误差e可控制在±3 mm以内。
操作时应注意,首先应清除设站处下方范围半米内的淤泥,挪开可能存在的管线(或尽量避开)。安放墩子后,要不规则地进行多次晃动,使墩子最终能够保持在稳定不扰动的状态。在仪器高量测及周边走动时,做到动作轻、幅度小,以免扰动墩子。
另外,使用“设站墩”作为前视放点,或后视定向目标时,要尽量使钢筋处于自由状态。以墩子前视时,可以将棱镜倒置,以镜头略碰触钢筋头中心进行放点测量;以墩子后视时,可使用笔尖立在钢筋头中心,用以指示后视方向以定向,以此达到不扰动钢筋,准确后视的目的。
3.3 坑道内高温、潮湿
坑道内外温差大,依照相关规范以及实践经验[10],全站仪在坑道内取出后,静置5 min再开机,开机后仍应静置10 min以上,使其适应环境温度。而后小心擦拭目镜、物镜镜头的雾水,在距仪器约20 m处设置棱镜,瞄准棱镜测距30次以上。以此确保目镜、物镜视场清晰,光束传播适应坑道环境。之后才开始正常工作。
另外需要注意的是,全站仪下方的对中望远镜镜头可能也会起雾,导致对中视场模糊,此时应小心将全站仪从三角基座上取下,擦拭镜头。因为坑道内光线暗,在设站对中,以及瞄准目标点时,都应该微调螺旋,认真消除视差。
3.4 坑道碎部测量要点
(1)坑道边线:棱镜的测量中心是其镜头中心,因此坑道边线测点全部采用免棱镜的方式,打开SOKKIA CX101全站仪照准指示激光,直接照准坑道侧墙特征点进行测取。当激光束与坑道侧墙成钝角方向时,以反光板辅助遮挡,以免激光散射,记录错误位置,如图4所示。

图4 坑道边线测绘示意图(俯视)
(2)坑道内高程:免棱镜测高程不易获取准确目标高,因此坑道内高程点全部采用光学反射棱镜的方式,每个测点确定目标高后测取。
3.5 坑道内灯光不均匀
前期坑道清淤施工过程中,在坑道顶部按照一定的距离间隔安装了部分射灯,当全站仪逆光测量时,因灯光照射,极难瞄准目标测量。此时应安排人员在电闸处临时关闭照明,以手电筒(头灯)沿测量光束照射目标棱镜方向,搜寻棱镜测量,或由测绘员在碎部点处指示激光斑点定位测量。
4 成果标准及经验总结
4.1 成果精度
针对不利因素,利用上述各种解决方案,创新地创造了测量条件,得以完成了测绘任务。导线平差成果如表1所示。
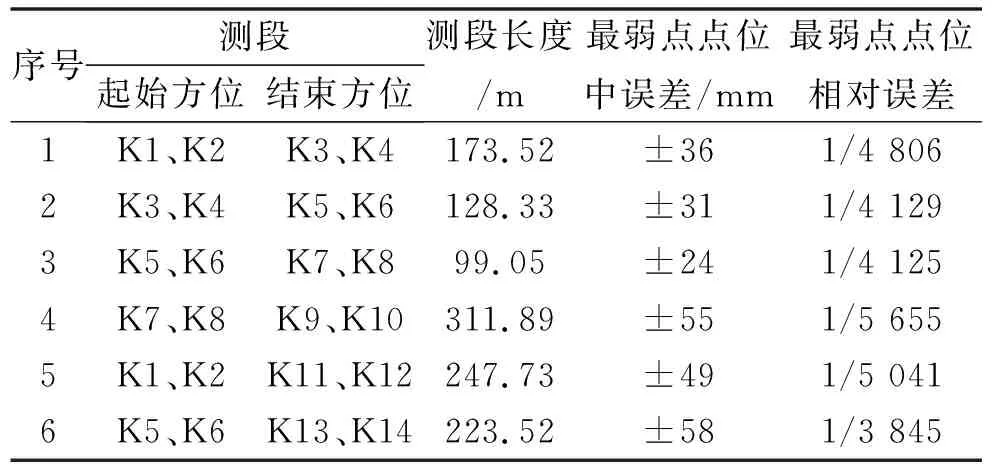
表1 坑道各导线测段平差成果
数据分析显示,附合导线最弱处位于两两出口中间,最弱点点位中误差均值±4.2 cm,平面相对中误差约1:4 600。本项目使用的SOKKIA CX101全站仪测角精度1″,利用免棱镜测量碎部点的测距精度为(3+2 ppm×D)mm,本项目中测距长度最长不超过100 m。据此推求碎部点平面精度约为±10 cm。
4.2 经验总结
(1)从数据上看,碎部点平面精度±10 cm,这样的精度是比较差的,但面对使用单位对图纸的急切需求,在诸多不利因素下,拿到这样的第一手资料,得到了业主的认可。后续若需要更精确的成果,可待测量条件改善后,再做精细测量。
(2)根据经验可知,钢筋越长,顶部越容易受外界影响而产生扰动。本次测量因墩子委托第三方制作,为求工作便利,设置了高1 m可供全线使用的墩子。如果条件允许,应设置多种尺寸高度的“设站墩”,根据水深情况,选用钢筋最短的墩子,如此可以进一步提高测量的精度。另可优化“设站墩”的结构形式,如做三脚结构、增大墩体体积等,力求其在水下的稳定。
(3)针对坑道曲折,导线测量转点多,且因存在积水转点无法保存的测量条件,本次测量结合规范要求的“先控制、后碎部”,采用了“边控制、边碎部”的外业测绘方法,将控制测量、碎部测量的先后在内业数据处理时体现出来。如此保证整体作业速度快,效率高,节省了耗时的控制测量工期,符合本次任务快速获取现场测绘资料的要求。延伸考虑,当坑道内临时控制点不易保存,可参考地铁隧道监测的控制点布设方法,在坑道壁设置控制点位,埋设强制对中观测墩、棱镜转接头等,以此保证成果精度的需求,值得下一步进行思考。
猜你喜欢
意林·作文素材(2022年7期)2022-05-03 15:09:57
高速铁路技术(2022年1期)2022-03-16 12:33:48
环球时报(2019-01-10)2019-01-10 06:25:43
山东煤炭科技(2018年3期)2018-12-05 11:58:38
特别健康(2018年9期)2018-09-26 05:45:44
文学少年(绘本版)(2017年7期)2017-05-30 10:48:04
测绘工程(2016年3期)2016-04-11 01:43:10
城市轨道交通研究(2014年5期)2014-03-26 22:38:51
防护林科技(2013年1期)2013-08-08 11:20:18