高精度BDS/GPS变形监测技术在桥梁监测中的应用研究
2020-05-17 06:16鄂明曦
矿山测量 2020年2期
鄂明曦
(甘肃省地质矿产勘查开发局测绘勘查院,甘肃 兰州 730060)
随着国内交通网的不断发展与扩建,越来越多的大型桥梁在大江大河以及高山峡谷被建设,桥梁的数量和技术在不断发展的同时,桥梁的健康状况也被越来越多的人关注。由于交通荷载、温度、风力、结构老化、日照以及地震的影响,桥梁在运营期间产生的动态变形大致可以分为永久变形和状态可恢复的短期变形[1-2]。传统的桥梁变形监测手段主要有全站仪与水准变形监测技术,新兴的桥梁变形监测技术主要近景摄影测量技术、三维激光扫描技术和地面干涉测量技术。基于上述监测技术,国内很多专家学者展开了研究,倪家明[3-4]等利用三维激光扫描技术对桥梁进行了变形监测研究;戚斌[5]等研究了GBInSAR技术在桥梁变形监测中的应用;柴勇[6]等将近景摄影测量技术应用于桥梁变形监测。相比于上述变形监测技术,GNSS技术具有全天候连续监测、高精度、高采样率、受天气影响较小、监测点间不需要通视和能获取三维坐标的优点。刘芳亮[7]等利用GPS-RTK技术对江顺大桥进行了变形监测研究;刘明亮[8]等利用北斗精密单点定位技术对现役桥梁进行了变形监测研究;刘志强[9]等结合北斗与GPS技术对桥梁进行了变形监测研究。
针对以上的研究与不足,本文基于国内某现役大型桥梁,采用BDS/GPS技术对其动态变形趋势进行监测,为今后的桥梁变形监测分析提供一种可靠的技术手段。
1 数据处理理论
GNSS观测值主要有伪距观测值和载波相位观测值,其中伪距观测值精度较低,多应用于低精度导航定位领域,载波相位观测值精度较高,通常在高精度导航定位中使用,但因载波相位存在整周未知数,数据处理较复杂[10]。由于北斗与GPS在很多方面设计都不同,因此在进行组合定位时要对其进行统一。
1.1 时间系统统一
北斗导航系统和GPS有自己的时间系统,北斗的时间基准为北斗时(BDT),GPS的时间基准为(GPST),二者采用原子时,秒长定义一样,并且都不闰秒,但是它们的起算时间点不一致,其中GPS的起算时间为1980年1月06日0时0分0秒,北斗的起算时间为2016年1月1日0时0分0秒。由于协调世界时(UTC)存在闰秒,因此导致BDT与GPST相差1356 周和存在一个14 s的系统差。具体的关系如下:
BD周=GPS周-1356
(1)
BD秒=GPS秒-14
(2)
1.2 数学模型
由于误差的存在导致卫星到接收机的观测距离并不是卫星到接收机的真实距离,这种带有误差的量测距离称为伪距。伪距的基本观测方程如下:
(3)



Δtrop+MPi+ε
(4)
式中:Li为载波相位观测值;λi为波长;δti为接收机钟差;δtj为卫星钟差;Δion为电离层延迟;Δtrop为对流层延迟;MPi为伪距多路径误差;ε为观测噪声。
通常在进行高精度相对定位时,一般采用高精度的双差载波相位观测值模型,在短距离RTK中对流层和电离层延迟误差和被消除,具体形式如下:
(5)
式中,φ为载波相位观测值;ρ为站星间距离;N为整周模糊度。
接下来对北斗和GPS载波相对定位算法进行融合,矩阵形式如下:
(6)
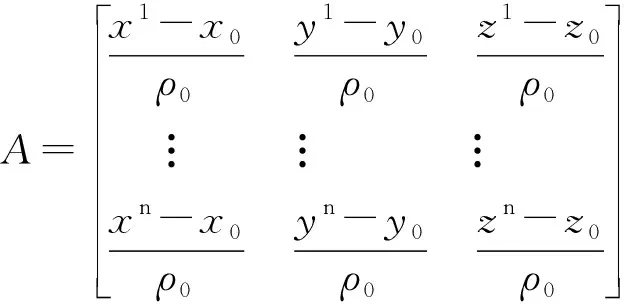
(7)
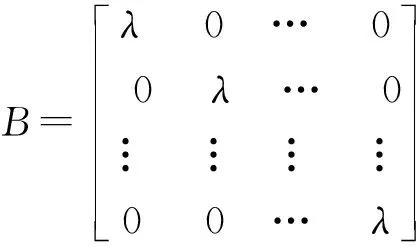
(8)

而对于接下来的参数则采用卡尔曼滤波算法进行参数估计,采用LAMBDA方法进行模糊度固定,限于篇幅原因,本文就不详细的介绍卡尔曼滤波算法和LAMBDA方法。
2 工程实例分析
2.1 监测方案
监测桥梁为我国某现役大型跨河桥梁,为双向双车道桥梁,东西向通车,共有9个跨径,自建成以来,一直承担着连接河流两岸交通的任务,近年来随着车流量、车辆荷载增加以及自然因素的影响,桥梁部分结构出现损伤,因此对其进行变形监测是一项十分重要的内容。
根据此桥的特点,在桥的关键位置处布设四个监测点,在同一断面,监测点对称布设,在距离桥约200 m稳定区域处布设基准点,作为单历元解算基准。接收机采用国产的接收机,采用率设置为1 s,截止高度角设置为15°,连续观测时间为12 h,本文则截取车流量较多的其中2 h作为变形监测分析时间段。
2.2 数据处理分析
在进行数据处理之前,先分析一下在观测时间段内,接收机能接收到的卫星数以及北斗与GPS空间几何位置情况,详细情况如下图所示:
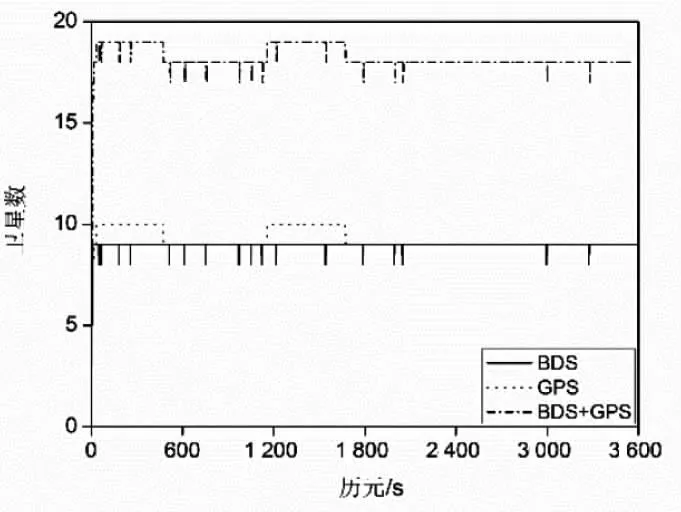
图1 卫星数
图1和图2为处理数据观测时间内共识卫星数和PDOP值随时间的变化序列图,如图所示,北斗的卫星数大部分时间为8颗,少部分时间为6颗,GPS的卫星数大部分时间为8颗,少部分时间为10颗,卫星数基本稳定。由PDOP值变化曲线同样可以看出,PDOP值基本稳定在1~4之间,可以看出在观测时间段内北斗和GPS的卫星结构稳定,卫星空间几何结构良好,同时可以看出BDS+GPS组合卫星结构和空间几何分布情况优于北斗与GPS单系统。
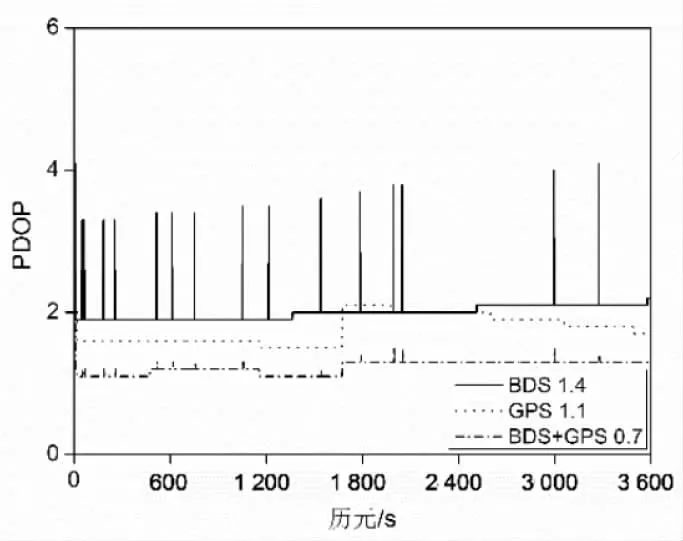
图2 PDOP
2.3 监测结果分析
为了详细分析桥梁的动态变形情况,对于桥梁上对称布设的4个监测点取一侧的2个监测点(J1,J3)进行处理分析,数据处理按照采样频率的设置,每一秒获取一个结果,监测当日天气晴朗,微风3.2 m/s。在进行数据处理时按照BDS单系统、GPS单系统和BDS+GPS组合三种方案进行处理。按照上述方案处理之前,先对监测点和基准点进行网处理平差,获取的静态坐标作为基准值。每个监测点的具体动态变形情况如图3、图4所示。
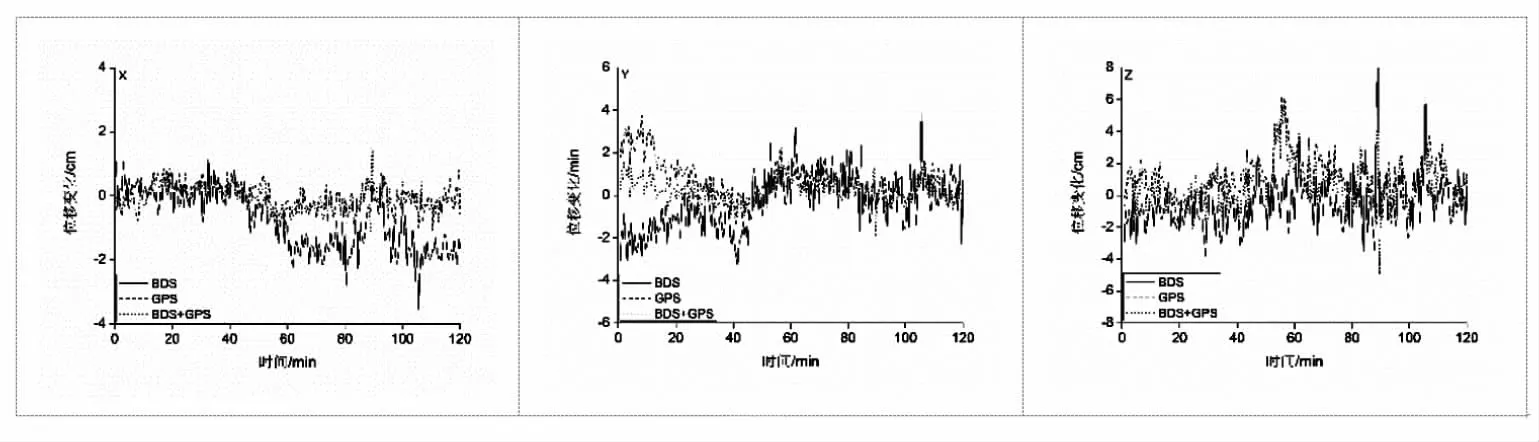
图3 J1点动态变形情况
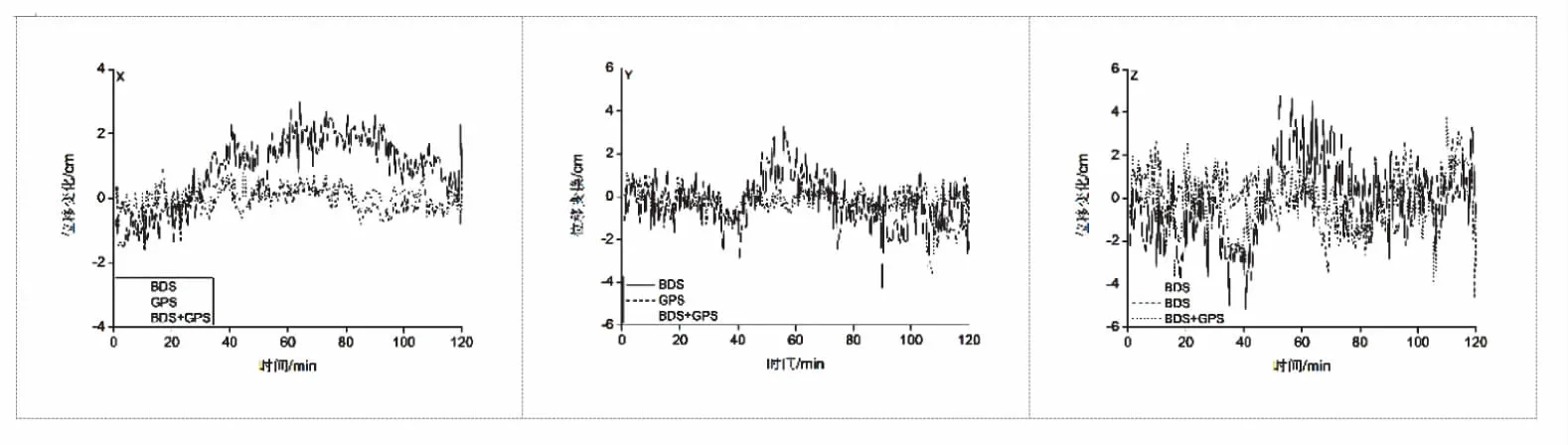
图4 J3 点动态变形情况
图3和图4为两个监测点在监测时段内三个方向动态位移变化序列,从三种数据处理方案解算结果可以看出,三种解算结果的变形趋势一致。如图所示,水平方向的位移变形要小于竖直方向位移变形,2个监测点的水平方向位移变化都在±4 cm之内变化,竖直方向位移变化在±6 cm之内变化。进一步分析三种数据处理方案的精度,对两个监测点三个方向的RMS值进行统计,如表1所示。
表1 RMS值统计/cm
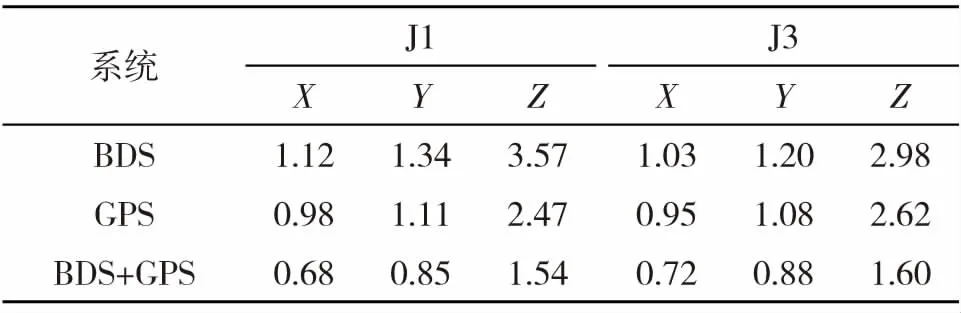
如表1所示,2个监测点的水平方向RMS要小于竖直向的RMS值,同时可以发现,BDS+GPS组合定位精度要高于BDS和GPS任何一单系统的定位精度,在X方向最大提升39%,在Y方向最大提升37%,在X方向最大提升57%。
3 结 论
本文基于国内某大型桥梁监测实例,通过BDS、GPS和BDS+GPS三种数据处理方案,对桥梁进行动态变形监测分析,得出以下结论:
(1)利用BDS和GPS技术对桥梁进行动态变形监测,精度可以满足桥梁变形监测精度要求,能详细的监测出桥梁的动态变形趋势,为桥梁的维护和修缮提供可靠的数据支撑。
(2)BDS+GPS组合技术与BDS和GPS单系统定位技术相比,可以有效的改善卫星空间几何分布,提高定位精度,是今后桥梁变形监测的一种可行性技术方法。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
排灌机械工程学报(2022年6期)2022-06-23
煤气与热力(2022年4期)2022-05-23
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
建材发展导向(2021年12期)2021-07-22
陕西农业科学(2020年6期)2020-07-06
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
雷达学报(2018年5期)2018-12-05