
基于项目驱动的工业机器人实验设计和开发
2020-05-14 02:42贾卫平赵洪健盖欣桐韦佳宝
教育教学论坛 2020年16期
贾卫平 赵洪健 盖欣桐 韦佳宝

摘要:工业机器人综合了机械、自动化、计算机等多学科技术,是智能制造系统中的重要单元。在课程实践中,将工业机器人作为一种机电产品进行系统设计和控制操作。基于ABB六轴工业机器人实验平台,以企业工程应用和自主设计任务作为创新性设计实验项目内容,进行工业机器人三维建模、控制系统设計、程序开发和动作执行。在工业机器人课程中应用后,取得了明显的效果,有助于学生更好地掌握工业机器人基本理论和项目开发,培养了学生的设计开发能力、实践动手能力和创新设计能力,并能使学生更好地理解工业机器人单元在智能制造系统中的作用。
关键词:工业机器人;项目驱动;设计开发;实践;创新
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2020)16-0226-03
一、引言
随着传统装备制造业向智能制造业的产业升级,综合了机械、自动化、计算机等多学科知识的工业机器人技术,作为高端装备制造的基础设备之一,成为“中国制造2025”的重点发展领域[1-4]。工业机器人课程是机械类本科专业开设的一门专业课程,同时设置了实践环节,将理论和实践结合是一种学用结合的有效教学模式[5-8]。课程组在工业机器人实践平台上,将工程应用案例化和自主设计开发内容作为项目驱动,开设工业机器人基础性和创新性实践内容,在课程应用后,可使学生得到机器人理论、机械结构、机电控制、机器人编程和实践动手的综合训练,并进一步了解工业机器人在智能制造中的应用[9]。本课程的实践项目建设思路,对与产业结合的其他课程也能起到一定的参考意义。
二、实践项目设计思路
在工业机器人课程中,通常将机器人的认知与分析、机器人的示教控制,作为课程固化的实践内容[6]。但是由于与应用结合不紧密,仍然存在停留在表层知识的理解,而自主进行二次设计和开发仍有局限性等问题。因此,我校首先在工业机器人课程原有基础性实践内容中,以工业机器人在工程中的实际应用,如搬运物料、焊接、打磨、喷涂、采摘、装配等作业[1]作为工程案例,从分析、计算、选型开始,系统地进行机械结构设计和控制系统设计,在项目中学习和理解工业机器人的基础理论知识,学习机器人编程语言和动作控制。其次,在工业机器人课程中新增加创新性实践内容,将教师的科研课题[6]、大学生创新项目、课外科技竞赛[10]等内容都作为自主开发创新的项目,完成工业机器人的动作编程和实践操作,以学生自主设计和解决问题为主,引导学生提出问题和解决问题。
三、工业机器人基础性设计实践
(一)机械结构设计分析及三维建模
以搬运物料作为作业任务,在ABB六轴工业机器人实践平台上进行工业机器人的机械结构设计,目的是在设计中能更好地理解和掌握工业机器人的基本理论知识。分析和计算的主要参数有:机械手工作空间范围、动作规划、各关节节拍、各动作时间分配、各个关节的运动速度、工作空间内各关节臂臂长和运动行程,以及机械手初步受力分析确定末端许用载荷等参数。
参数化设计是企业技术人员常用的设计方法[11]。进行工业机器人三维模型设计时,选用参数化设计软件,如三维建模软件Solidworks,对于同型号工业机械手结构,以各关节轴线在空间中的位置关系构成基础参数,通过各关节轴线相对位置的平移旋转进行调整,实现设计中工业机械手各零部件的尺寸变化,从而拟定出工业机器人各关节轴线的位置关系。根据工业机械手基本参数定出机械手各个关节轴线位置尺寸后,对工业机器人进行整体结构建模;同时利用参数化软件的测量功能,得到模型的结构和质量属性等参数,最后完成工业机器人三维结构模型。
(二)工业机器人控制系统设计
工业机器人控制系统设计,主要是机械手伺服驱动系统硬件设计和控制算法设计。控制系统工作流程为:编程示教器将各程序命令传入主机中,与主机直接通讯,构成人机交互;其次在主机控制总线上的各个模块进行通讯,各模块包括传感器、伺服驱动模块和其他I/O设备,最后伺服驱动系统对伺服电机的闭环控制,实现机械手的运动和完成任务。
工业机器人控制系统设计思路为:通过理论分析,将驱动控制系统理论算法转换为具体的实用算法;设计控制系统框图,利用C语言设计出PID闭环控制传递函数。对机器人实际工作中的末端位姿进行实时监测是很困难的,为提高控制精度,机器人电机控制必须选择闭环PID方式去控制。
四、基于工业机器人平台的项目实践和二次开发
在ABB六轴工业机器人平台上,以实际执行任务作为工业机器人编程和执行动作来进行实践和应用。将工程应用案例化作为实践项目[12],更利于学生学习和掌握工业机器人的基本编程命令和操作实践;而学生可自主设计项目,如绘制图形进行二次开发和设计,将工程应用和创新设计相结合,完成综合性的设计和开发任务。
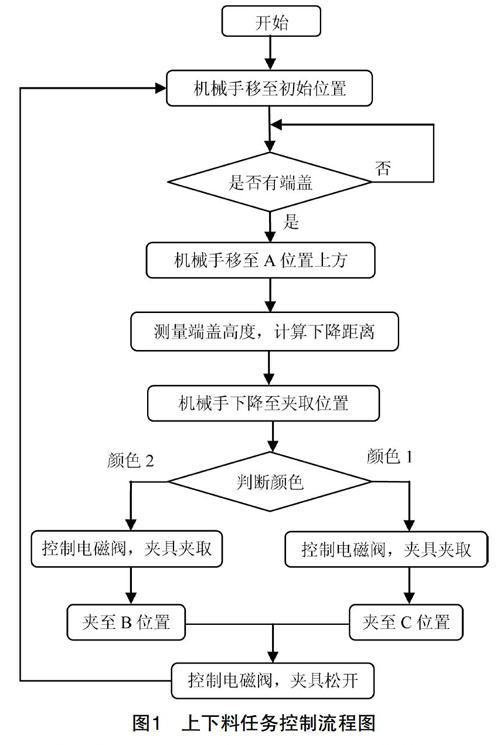
(一)上下料项目
工业机器人进行上下料,在企业实际应用中是工业机器人的常见任务。实践要求为:根据颜色判别物料,并将其放置规定位置。根据任务分析及设备条件,设计任务控制流程图如图1所示,控制流程图也可用为工业机器人编程的参考。
(二)执笔作画任务
在工业机器人平台上,引导学生自主设计实践内容,自主开发创新的项目,能够调动学生的学习兴趣,并能在实践中发现和解决问题,培养学生的自主学习能力和创新设计能力。执笔作画任务,是指学生在实践中自主创意、自主开发并完成的项目。
在进行执笔作画设计时,将工业机械手的末端执行器调整为绘制工具,并在A4白纸上简单画一幅画形。对于书写和作画而言,重点在于笔尖的轨迹,将机械手工具坐标原中心TCP点移至笔尖。该开发任务重点在于笔尖的运动即TCP点的运动,考虑到A4纸的位置不是固定位置,引入工件坐标系,将A4纸当成一个非常薄的工件,在每一次画画时确定A4纸所在的平面及A4纸的铺放姿态。通过描点法,将线条分段,获取所绘图形轨迹,将所绘图形分得越细,则画出的相似程度越高。图形中线条坐标的获取方法主要有网格描点记录法和图片处理软件生成法。其中网格描点记录法通常用于简单的图形线条,依赖于人的视觉去寻找描点记录。而图片处理软件生成法则是主流,软件可利用人工智能的算法对图片处理,比如图片滤波、灰度二值化、边沿检测等,高效且快速。此次绘制图形如图2(a)所示,图形比较简单,故采用网格描点记录法,执行绘画过程和完成的图形效果如图2(b)(c)所示。
五、结语
基于ABB六轴工业机器人平台,以项目驱动,将机器人在企业应用搬运上下料和自主创新设计内容作为项目开发任务,按照系统化的实践思路,进行工业机器人三维结构建模、控制系统设计、程序开发和动作执行实践操作。在工业机器人课程应用后,学生既能够在实践中理解和掌握工业机器人理论知识,又能通过自主设计的内容提升学习兴趣和解决问题能力,提高自身的设计实践和创新设计能力。实施后课程建设取得了明显的效果。
参考文献:
[1]王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(9):1-13.
[2]计时鸣,黄希欢.工业机器人技术的发展与应用综述[J].机电工程,2015,32(1):1-13.
[3]周传彪,周晓莲.工业机器人的研究现状及展望[J].装备制造技术,2018,(12):74-76,85.
[4]安娟,牟海荣.在机器人课程中开展创新创业教育的探索与实践[J].教育教学论坛,2019,(12):265-266.
[5]李颀,强华.工业机器人实验教学平台[J].实验技术与管理,2018,35(4):166-170.
[6]刘玉琳,徐双满,霍凯.科教融合创新指导下的本科生实验项目开发[J].实验技术与管理,2018,35(8):31-34.
[7]胡洪鈞,谢立敏,梁晓,等.工业机器人实验项目开发与实践[J].实验技术与管理,2015,32(9):201-203,207.
[8]魏志丽.虚拟工业机器人实验实训室的建设与研究[J].自动化技术与应用,2013,32(8):85-87,110.
[9]吴长庚.机械设备制造中自动化技术及工业机器人的应用研究[J].山东工业技术,2019,(6):14,31.
[10]吴立华,丁度坤.基于技能大赛的“工业机器人技术”专业建设[J].教育教学论坛,2019,(6):262-263.
[11]冯慧娟,苗青,樊胜秋,等.工业机器人机械结构模块化设计[J].机械工程与自动化,2019,(2):100-101,104.
[12]黄晨华,毛桂生.上下料工业机器人结构设计及仿真研究[J].机械设计与制造,2013,(3):161-164.
Design and Develop of Industrial Robot Experiment Based on Project-driven
JIA Wei-ping,ZHAO Hong-jian,GE Xin-tong,WEI Jia-bao
(College of Mechanical Engineering,Dalian University,Dalian,Liaoning 116622,China)
Abstract:Industrial robots are important units in intelligent manufacturing systems which integrating multidisciplinary technologies such as mechanics,automation and computers.The industrial robot was regarded as an electromechanical product to be designed and practiced in the course teaching.The experimental projects were mainly come from the enterprise engineering application and independent design task of innovative ideas,and were carried on the ABB six-axis industrial robot platform.The industrial robots were systematically designed and operated about the 3D mechanical structure,electromechanical control system,the operation program and action execution.After being applied in the course,the obvious effects have been achieved on mastering the basic theory and project development of industrial robots.And it was benefit to cultivate the design ability,practice ability and innovation ability,as while as to understand the role of industrial robot on the intelligent manufacturing system.
Key words:industrial robot;project-driven;design and development;practice;innovation
收稿日期:2019-06-30
基金项目:教育部新工科研究与实践项目(面向新工科人才培养的工程实践教育体系与实践平台建设);教育部产学合作协同育人项目(“工业机器人”课程建设)
作者简介:贾卫平(1971-),女,吉林永吉人,硕士,副教授,副院长,主要研究方向为高等工程教育,电化学沉积。
猜你喜欢
现代农业科技(2016年20期)2016-12-20
文理导航(2016年30期)2016-11-12
人间(2016年27期)2016-11-11
求知导刊(2016年4期)2016-03-19
