基于车辆轨迹重构的信号交叉口延误提取研究
2020-05-13 10:01:14张惠玲刘晓晓许裕东
交通运输系统工程与信息 2020年2期
张惠玲,刘晓晓,许裕东
(1.山地城市交通系统与安全重庆市重点实验室,重庆400074;2.重庆交通大学交通运输学院,重庆400074)
0 引言
延误是评价信号交叉口运行效率和服务水平的重要度量参数.受检测技术等限制,传统的延误获取方式为理论推算法和现场观测法[1],理论推算法精度不高,现场观测法难以持续观测.随着新技术的不断推广,车辆在交叉口的运行轨迹信息逐渐被应用在交叉口参数提取中.SUN等[2]通过短距离手机数据推导了车辆在交叉口延误参数的获取方法.Hao等[3]应用交通流理论等方法重构了车辆在进口道的运行轨迹,提取了信号交叉口排队长度等参数.Cheng等[4]使用样本车辆轨迹,借助车辆动力学模型分析了周期排队长度的估计方法.Ban等[5]使用样本车辆的行程时间和动力学模型,估算了信号交叉口的延误参数.针对车辆轨迹数据:丁军等[6]介绍了车路协同系统下的数据采集标准,以及轨迹数据特点;唐克双等[7]借助微观交通仿真软件中车辆产生的过程,对定点检测场景下的干道车辆轨迹重构方法进行了分析;Wang等[8]通过LWR模型,对信号交叉口浮动车和线圈设置下的排队长度获取方法进行了分析;张惠玲等[9-10]使用图像处理、逻辑推导等方法对摄像头场景下的交叉口延误参数进行了分析.
交通管理部门在信号交叉口停车线附近设置了视频监控设施,这些设施在发挥其原定功能的同时,为获取红灯期间前f辆到达车辆的轨迹信息提供了可能,也为丰富交叉口相关参数的获取方式提供了现实基础.本文以设置摄像头的信号交叉口为研究对象,通过可以获取的数据信息,借助相关方法确定车辆在交叉口运行的几个关键点对应的时间,再对车辆的运行轨迹进行重构,提出交叉口延误参数获取的方法.
1 车辆运行轨迹分析及重构
1.1 车辆运行轨迹分析
车辆在信号交叉口的运行轨迹如图1所示.受信号灯控制:红灯启亮后,第1辆车由自由行驶速度经历减速在停车线前停止等候绿灯,后续到达的车辆也陆续减速并停止;绿灯启亮后,第1辆车经历启动、加速,直至恢复正常行驶速度驶离交叉口,后续经历停止的车辆也陆续加速并驶离交叉口.在停车线附近设置摄像头的场景下,可以观测到前f辆车的停车及启动时间,以及本周期后续所有驶离车辆通过停车线的时间.

图1 车辆在信号交叉口的运行轨迹图Fig.1 Trajectory of vehicle at signalized intersection
1.2 关键点分析及其时刻确定
由上述运行轨迹分析可知,车辆在信号交叉口经历的停止、启动等过程可以描述为:开始减速,停车等待,启动加速,恢复正常行驶速度.设定行驶车辆类型全部为小型车辆,分析车辆的运行轨迹,其核心在于确定车辆运行轨迹改变的4个点,即4个关键点,分别是第j+1辆车的减速时间,车辆停车时间点车辆启动时间点,以及车辆恢复正常行驶速度点本文设定摄像头获取时刻为车辆的停车时刻,故先分析未进入摄像头拍摄范围的车辆停车时刻.
1.2.1 车辆停车时刻确定
设摄像头可以获取前f辆车的到达轨迹信息包括车辆开始减速、停止、启动,以及恢复正常行驶速度的所有时间和位置信息,并获取本周期所有车辆通过停车线的时间.通过图像处理的相关方法,获取前f辆车在摄像头拍摄范围内的运行轨迹.需要重构的车辆为第f+1辆及之后排队的车辆轨迹.需要的信息还有交叉口的配时信息,摄像头所观测到的前f辆车到达交叉口及离开停车线的时间,以及摄像头观测到的交叉口进口道流量.
获取信息后,按照图2流程获取未进入摄像头拍摄范围内停止车辆的停车时刻.

图2 车辆停车时刻判断流程图Fig.2 Flow chart of vehicle stop time judgment
如图2所示,推算车辆停车时刻的具体步骤如下:
Step 1对于需要检测延误的车道,新周期开始,即红灯刚开始启亮,提取摄像头观测到的前f辆车的车辆到达时刻,k′=1,…,f,以红灯开始为该周期的0时刻,以及该周期绿灯相位内每一辆车车尾通过停车线的时刻
Step 2结合相关参数,在已知交叉口前f辆车到达时间的情况下,第j+1(此时令j=f)辆车的到达概率分布函数为

式中:pj+1为在lΔt内到达j+1辆车的概率;q为车辆的平均到达率(veh/h);为第j+1辆车到达的时刻(s).
Step 3Δt=1,其中,l为增长步长,Δt为时间间隔(s),n为自然整数.
Step 4取一个随机数R,R∈[0,1].若R<Pj+1,则认为第j+1辆车在+lΔt时间到达,即第j+1辆车的到达时间为 Δt=1;否则,令l=l+1,直到满足R<Pj+1,即推得
Step 5返回Step 2,重复Step 2~Step 4,计算所有经历排队车辆的到达时刻,即可得到车辆到达时刻信息.
根据上述步骤,推算每个周期经历停车的车辆停车时刻.
1.2.2 车辆减速时间点
以车辆自由运行时的速度作为车辆自由行驶速度,车辆减速时刻,即车辆由自由行驶速度开始减速的时间点,就是车辆接近停车线的过程中开始产生延误的时间点.
以自由速度行驶的车辆,在减速过程中经历由快到慢的减速过程,减速之初减速度绝对值由0逐渐增大,减速之末减速度绝对值逐渐减小至0.在拍摄的交叉口视频中,对车辆的运行轨迹进行提取,得到某辆车在减速过程中的速度变化情况,如图3所示.

图3 车辆减速变化过程Fig.3 Vehicle deceleration process curve
速度变化曲线与潘登等[11]分析结果相似,根据车辆减速特征,将车辆减速过程的速度变化近似为一种双曲正弦函数,即

式中:v0为车辆自由行驶速度(km/h);k为车辆速度变化快慢参数;τ为车辆减速时间中点(s);v为车辆速度值(km/h);t为时间(s);Δv为大于0的微小增量常数(km/h).
根据式(2),k分别取值k1、k2的v-t曲线如图4所示.
从图4可以看出,可以通过k值调控曲线变化的快慢,在[0 ,τ]期间,车辆加速度绝对值逐渐增加,到τ时达到加速度绝对值的最大值;在[τ, 2τ]期间,车辆加速度绝对值逐渐减小,到2τ时加速度为0.

图4 车辆减速v-t图Fig.4 Vehicle deceleration(v-t)curve
在车辆初速度v0已知的条件下,可根据k值确定时间常数τ,即

当车辆由初速v0减速至末速0时,有

对式(2)积分得到,车辆从开始减速到停车的运行距离为

根据式(5)可知,在车辆初速、末速确定情况下,k值唯一,即确定了车辆的v-t曲线,从而确定了其自身的运行时间和距离.
根据式(2)得到车辆加速度为
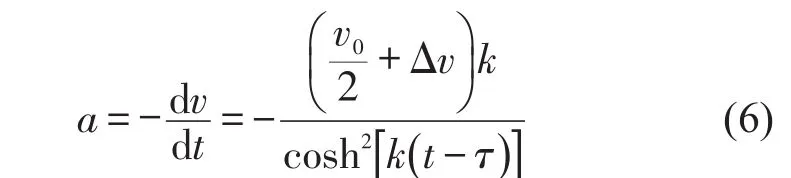
由于cosh2[k(t-τ)] ≥1,由式(6)可知


1.2.3 车辆启动时间点
车辆启动时间点,即信号灯转为绿灯后,车辆由停止状态开始加速的时间点.根据HCM2010定义,第一车头时距为绿灯开启时刻到排队头车通过停车线的时间间隔,第二车头时距为排队头车通过停车线的时刻到排队中第2辆车通过停车线的时间间隔,随后的车头时距以此类推.4辆车后,经历排队的后续车辆以稳定的速度通过停止线,此时的车头时距相对而言是一个常数h,那么车辆启动时间间隔也同样为一种常数.
本文背景为已知每个周期前4辆车到达及启动时刻,且所有车辆均为小型客车,那么第5辆及之后车辆的启动时刻为

1.2.4 车辆恢复正常行驶速度点
车辆恢复正常行驶速度点,即绿灯亮起后,车辆由加速运动转变为正常匀速行驶的时间点.提取交叉口视频中某辆车运行轨迹的启动—恢复行驶过程,绘制车辆的v-t曲线,结果如图5所示.
由图5的曲线变化趋势可以看出,该过程与二次曲线拟合效果较好,与相关研究得到的车辆加速过程的匀变加速的假设相吻合[12],由匀变加速直线运动方程可得

式中:v为车辆在起动加速过程中任意时刻的速度(m/s);为车辆在起动加速过程中加速度的变化率;a0为车辆初始加速度(m/s2).

图5 车辆加速典型速度特征曲线Fig.5 Vehicle acceleration typical speed characteristic curve
根据速度—加速度关系类比加速度与加速度变换关系,两者之间基本呈线性关系,即

式中:a为车辆在起动加速过程中任意时刻的加速度(m/s2).
在车辆恢复正常行驶速度的时刻,加速度为0,速度为v0,带入式(11)可得

式中:te为加速时间(s).
使用视频中提取的速度数据,逐个间隔计算,得到每辆车在每个间隔的加速度变化情况,带入式(12)计算得到车辆的加速时间.车辆恢复正常行驶速度的时间点为

2 交叉口延误提取及实现
2.1 交叉口延误提取
将在交叉口经历停车的车辆轨迹重构之后,即可由延误定义得到交叉口的延误参数,具体计算模型为

2.2 实例分析
选取重庆市沙坪坝区西双大道与永祥路信号控制交叉口进行实例验证.考虑视频拍摄的范围要求及摄像机架设的可行性,视频拍摄地点选择在交叉口的东进口道,选定区域如图6所示.

图6 交叉口断面位置及数据提取区域Fig.6 Intersection section location and data extraction area
考虑排队车辆数、排队车辆类型,选取东进口道两条直行道提取车辆运行的轨迹数据,即图6中方框所示范围.
使用车辆轨迹获取软件提取拍摄视频中车辆的真实轨迹信息[13].拍摄前,测量或记录现场地面标记物之间的距离信息,在提取软件操作界面,数据提取人员将标记的地面标记物与视频中看到的同样标记物进行核对,并输入现实标记物之间的距离信息,实现图像像素与现实坐标的标定与转换.标定之后增加目标车辆,人工操作进行视频播放与跟踪,提取车辆在每0.1 s间隔的速度、坐标、加速度等信息.使用该软件提取研究范围内每辆车的轨迹数据,将数据导入Excel表格进行整理,结合交叉口信号灯转换信息,提取该周期内所有车辆轨迹数据,为验证重构方法提供基础数据.该软件对车辆轨迹的提取精度可以达到0.1 s[13].
(1)车辆重构轨迹与视频轨迹对比.
提取周期内车辆到达方式为自由到达,故在停车时刻点确定时,选取泊松分布函数,对第5辆车及之后车辆轨迹进行重构,与真实的轨迹信息进行对比,得到某周期车辆行驶的重构轨迹与视频轨迹,如图7所示.
由图7可知,在减速阶段前,视频中车辆轨迹的速度比重构车辆轨迹的速度快;在减速阶段,重构轨迹车辆减速在开始时较快,后期较慢,总体与原轨迹比较契合,但后几辆车的停车位置有一些小误差,这是因为后几辆车的停车位置为估算值;在加速阶段,重构轨迹车辆在开始时加速度较大,与模型相符.

图7 重构轨迹与视频轨迹图Fig.7 Reconstructed trajectory and video trajectory
(2)延误对比.
根据重构轨迹,对车辆延误进行提取,参数结果如图8所示.

图8 实际视频数据延误推算及对比Fig.8 Actual video data delay calculation and comparison
由图8可知,周期车辆的延误误差整体可以接受,最大误差为18.6%,误差均值为6.82%.
3 结论
以信号交叉口设置摄像头为背景,对可获取信息的潜在应用价值进行探索,研究结论为:确定交叉口车辆运行轨迹的关键点为车辆开始减速、停止、开始启动,以及恢复正常行驶速度几个关键点;分别应用获取的前一辆车信息,车辆的到达函数分布,车辆减速满足的双曲正弦函数,饱和车头时距,以及加速过程满足匀加速等,确定未获取信息的车辆停止、开始减速、启动,以及恢复正常行驶速度等关键点的时间信息;通过确定的关键点时间信息,重构车辆运行轨迹,并给出延误获取的方法.对于高峰期进口道过饱和情况下,关键点确定和车辆运行轨迹重构将是后续研究的主要方向之一.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
城市轨道交通研究(2022年4期)2022-04-16 02:59:18
汽车工程师(2021年12期)2022-01-18 06:02:43
山东科学(2021年3期)2021-06-10 06:50:56
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
城市道桥与防洪(2016年7期)2016-11-18 02:28:44
中国房地产业(2016年2期)2016-03-01 01:25:37
汽车维修与保养(2015年8期)2015-04-17 03:32:59
系统工程学报(2015年3期)2015-02-28 19:54:01
河南科技(2014年14期)2014-02-27 14:12:02