自组网的小尺度海域水动力分析
2020-05-08 12:13:06曹泽祥万隆君徐轶群
集美大学学报(自然科学版) 2020年2期
曹泽祥,万隆君,徐轶群
(1.集美大学轮机工程学院,福建 厦门 361021;2.福建省船舶与海洋工程重点实验室,福建 厦门 361021)
0 引言
随着海洋经济的发展,人类的海洋活动日益频繁,海洋环境保护、海洋的高效开发和利用,以及海洋作业安全等需求日益迫切,掌握海洋动力环境信息具有重要意义。目前,对海域的动力监测方法包括利用数值模拟分析监测、物理模型分析监测、固定基站监测、浮标监测等。綦梦楠等[1]采用区域海洋数值模式(ROMS),对厦门湾及邻近海域的潮汐、潮流进行数值模拟;温生辉等[2]采用基于Casulh的三维浅水模型,参考POM模型和BOM模型,加入简化紊流闭合模型,描述厦门海域浅滩三维潮流场;谢森扬等[3]采用环境流体动力学模型研究九龙江口-厦门湾潮汐潮流和盐度场的时空变化过程。但面对千变万化的海域环境,数值模拟手段具有局限性,特别是在海流较弱的情况下,误差较大。陈家扬等[4]采用都江堰卵石推移质模型研究泥沙运行规律。采用物理模型,需要大量人力、物力、财力,且模型只能适用于特定水域,无法适应水域环境的变化。张世民等[5]根据收集的厦门湾实测潮流、海面风观测资料分析厦门湾潮流性质、运动形式,但潮流站位非同步观测,且使用观测资料无法在短时间内快速分析潮流特性。吴维等[6]采用基于北斗系统的Argo浮标。采集海洋水文数据,但是Argo浮标体积较大,成本高,投放数量有限,主要用于大洋环流的观测。因此需要一种成本低、精度高、速度快、覆盖范围广的组网和实测方法,即使在海流较弱的小尺度海域也能较为精确的监测海域动力信息。
本文应用窄带物联网技术,在厦门湾海域投放大量微型浮标,利用微型浮标与基站,构建无线自组网络,用于采集该海域水动力学参数。构建海域动态监测大数据平台,集中接收和处理数据,实现数据共享及小尺度海域水动力学数据监测。
1 水面自组网络架构及装备
本文构建的水面自组网主要包括数据采集层、传输层、应用层,其架构图如图1所示。

数据采集层:主要由微型浮标和基站组成,微型浮标可装配多种传感器,采集海域动力数据,通过Mesh组网可以构建覆盖半径100 km的海域无线网络。
传输层:海面传输设备由微型浮标、海上基站、微动力装置组成;陆地传输由岸基基站网络组成;空中由卫星网络组成。最终将采集到的数据传送到大数据处理中心。
应用层:通过海洋动态监测大数据平台,对数据进行深入分析及挖掘,应用于海漂垃圾追踪、泥沙沉积追踪、海洋渔业指导等方面。
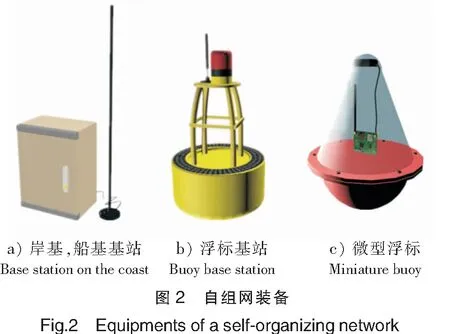
通过LoRa窄带物联网设备及Mesh组网方式实现快速组网,利用自组网络实现数据海陆空无缝隙链接,达到LoRa、卫星、网络的综合性广覆盖组网。通过多次在同一海域投放大量微型浮标,高密度采集该海域水动力学参数,结合大数据和模拟仿真,构建该海域水动力模型,实现一种精度高、速度快、覆盖范围广的组网方式。图2为自主研发的基于LoRa无线通信机制的微型浮标和岸基、船基基站。
微型浮标:带北斗和GPS双模定位,按设定周期将浮标的位置、航速、航向等数据主动发送到基站。带485通信接口,可以连接海洋监测传感器,用于监测海水温度、PH值、盐度等。
岸基、船基基站:侦听并接受微型浮标发送来的信息,单一基站通信半径20 km,多基站之间通过Mesh组网,可实现半径100 km数据传输。按1 min采集周期,单一基站最多能够容纳4 096个微型浮标。
2 海域动态监测大数据公共服务平台的构建
自主研发的海域动态监测大数据公共服务平台如图3所示。

平台具有以下功能。
1)试验设计:用户根据试验需求,录入海域、测试项目名称、微型浮标编号、批次、参与人员等信息。
2)实时监测:实时显示试验期间微型浮标位置、微型浮标航速和航向、基站位置信息,且可随时刷新页面获取最新数据。
据介绍,种植之前技术员为种植户提供测土服务,以土壤检测数据为依据,制定种植的底肥方案和追肥方案,底肥采用二铵或者复合肥。“今年也大面积示范不施底肥,全程追施液体肥。追肥采用配肥站提供的液体配方肥。液体配肥站采用工厂生产好的高浓缩的大量元素水溶肥、中量元素水溶肥、微量元素水溶肥为原料,根据不同作物的不同生产阶段的养分需求,应合作社和农户的要求,现场配置成液体配方肥,配好的配方肥直接进入田间使用。”
3)基本数据建档:通过设备管理、海域管理、测试项目管理、原始数据管理、人员管理5个菜单建立试验基本数据。
4)历史数据查询:用户通过选择海域、测试项目、批次、时间及微型浮标代号等信息查询选定项目历史数据。
5)数据分析:一是对采集的数据进行校验、纠错、插值、查询等处理,同时平台数据可以输出csv、txt的格式文件;二是将微型浮标数据统一传送到公共服务器,不同用户通过统一入口登录,完成数据分析和挖掘应用,采用云储存技术,将数据存放在由第三方托管的多台虚拟服务器,实现资源共享,最终通过大数据和对数据处理算法构建海域的精细化水动力学模型,实现平台可视化展示。
3 海域水动力学建模
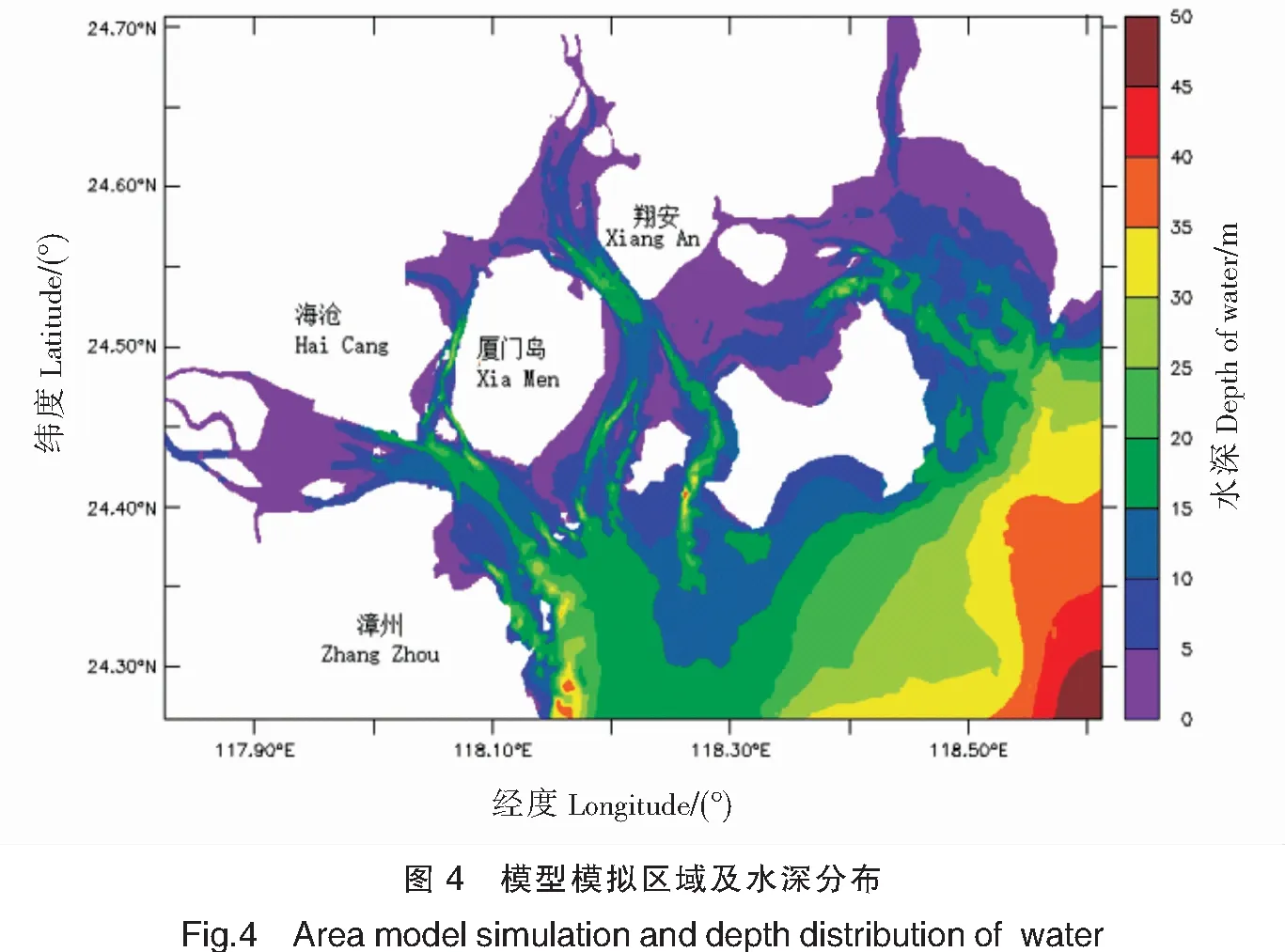
建立厦门湾海域水动力学模型,选取东经117.892 915°~118.290 756°;北纬24.349 057°~24.630 019°所覆盖的厦门湾海域为实验海域。
3.1 建模方法
利用美国新泽西罗格斯大学与加州大学洛杉矶分校共同研发的区域海洋动力模型建模方法构建ROMS(regional ocean modeling system)模型[8]。ROMS模型可以进行单独的海洋模式计算,也可以与大气模式等进行耦合计算。
由于厦门湾的水深较浅,水体性质垂向均匀,因此采用了ROMS中的二维模块进行模拟,即将问题简化为二维的浅水模式,其控制方程组如下。
垂向平均的动量方程组:
∂U/∂t+U∂U/∂x+V∂U/∂y-fV=-g∂η/∂x+Am∂2U/∂x2+τbx;
(1)
(2)
垂向平均的连续性方程为
∂η/∂t+∂(DU)/∂x+∂(DV)/∂y=0。
(3)
其中:U、V分别为x与y方向的垂向平均海水流速分量;D=H+η,η为水位,H为平均水深,D为总水深;f为科氏参数;Am为水平方向的涡动粘滞系数;τb=-rU|U| 为底部摩擦应力,r为摩擦系数;t为时间。
3.2 厦门湾海域模型配置与模拟
建立厦门湾二维海流模型,对厦门湾的潮位和潮流进行模拟,模拟区域如图4所示。
应用ROMS模型得出厦门湾海域流场分布和潮位变化图,如图5所示,图5b图中箭头代表水流方向。根据水动力学模型的计算结果,发现在厦门大桥附近海域存在海域水动力平衡区域,因此选取厦门大桥区域低平潮时刻(2018年11月26日11时)作为起始时间,分别在厦门大桥两侧布放微型浮标。该时刻对应的潮高如图5中红色标记所示。


4 厦门湾水动力学试验与分析
4.1 水动力学数据采集试验
首先,根据基站通讯半径以及厦门湾地形,构建厦门湾海域无线自组网络,基站位置如图6所示(圈中为基站覆盖范围)。微型浮标通过自组网系统,按1 min采集周期,向基站发送位置和速度数据。
依据图5,试验时间段选择2018年11月26日11时至15时,并于1时,分别在厦门大桥东、西两侧各投放6个微型浮标,如图7a所示。15时平潮,微型浮标位置如图7b所示。

4.2 试验结果分析
4.2.1 微型浮标轨迹分析
浮标轨迹及速度如图8所示。11时在厦门大桥两侧分别放置微型浮标,待涨潮时,左侧微型浮标由静止开始做加速运动,最大速度达到0.667 m/s;1 h后微型浮标到达距离杏林大桥2.0 km的位置,然后开始减速;1 h后微型浮标到达距离杏林大桥0.37 km(位置①)处,然后开始转向,之后先加速后减速,最大速度0.116 m/s,最终到达距离杏林大桥1.0 km的位置。右侧微型浮标在涨潮时先加速后减速,最大速度0.196 m/s;2 h后到达距离厦门大桥2.3 km(位置②)处,然后开始转向;40 min后加速,最大速度达到0.625 m/s,1 h后到达岸边。值得一提的是,厦门大桥两侧布放的微型浮标虽经过了涨潮但并未相遇。

通过试验发现,投放在厦门大桥两侧的微型浮标均未穿越厦门大桥下海域,可知杏林大桥与厦门大桥之间存在图8中红圈所示的海水潮汐动力平衡区域,与模拟结果吻合。该平衡区域产生的主要原因是,由于厦门东、西海域的潮波在此处汇潮,海水的辐聚使得其势能增加,动能减小,形成“动力堤”,正是由于“动力堤”的存在,阻碍了厦门大桥两侧海水的交换。
4.2.2 汇潮区表层水体扩散系数及尺度计算

其中:xi(t)和yi(t)是第i个微型浮标在时刻t上的水平位置,t为时间;N为微型浮标的数量。

通过计算分析得知,图8位置①处表层水体扩散系数ka为0.753 1~1.086 2 m2/s,扩散尺度l为40.249 2~48.433 1 m;位置②处表层水体扩散系数ka为0.682 3~1.094 5m2/s,扩散尺度l为40.249 2~48.433 1 m;位置③处表层水体扩散系数ka为50.219 8~66.083 3 m2/s,扩散尺度l为658.710 3~755.618 8 m;位置④处表层水体扩散系数ka为48.812 5~65.156 3 m2/s,扩散尺度l为649.415 1~750.300 2 m。通过对比发现位置③、④流速较快,其表层水体扩散系数及扩散尺度明显大于处于海水潮汐动力平衡区域处的位置①、②,说明位置③、④处海水交换能力强于位置①、②处,这与试验结果吻合。
5 结论
应用窄带物联网技术,构建一定海域的无线自组网络,通过投放大量微型浮标,高密度采集一定海域水动力学参数,并与模拟仿真相结合,可以获得该海域精细化水动力学模型。在厦门湾海域进行试验,结果表明,利用无线自组网微型浮标采集海域水动力学参数的方法是行之有效的,与传统方法相比,该方法成本低廉、组网速度快、精度高、覆盖范围广,可应对快速变化的海域环境,尤其适合对近海海流较弱的小尺度海域进行实时有效监测。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
中国自行车(2022年6期)2022-10-29 02:05:40
小哥白尼(趣味科学)(2021年4期)2021-07-28 02:23:58
幼儿美术(2019年3期)2019-09-10 22:07:06
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:16
海峡姐妹(2018年12期)2018-12-23 02:38:50
海峡姐妹(2017年6期)2017-06-24 09:37:36