
一种对空红外弱小目标检测跟踪方法研究
2020-05-08 02:00
红外技术 2020年4期
(陆军炮兵防空兵学院,安徽 合肥 230031)
0 引言
现代战争中,以小型无人机、电视侦察弹等为代表的战场侦查设备层出不穷,对地面部队和武器装备的生存能力形成较大威胁,为此,有效发现、跟踪和打击该类目标成为必然的战场军事需求。其中目标检测与跟踪技术作为关键技术,其性能的优劣直接决定了打击效果的好坏。常用的获取图像方式有毫米波成像、可见光成像以及红外成像3种。相比较而言,由于待探测的目标通常较小,基于毫米波成像效果较差,进而会导致跟踪误差较大;基于可见光成像时,如果天空中有云,则目标极有可能与背景混淆,为目标的检测与跟踪带来困难;而基于红外图像时,目标在以天空为背景的视野中较为突出,易于检测,且背景较为单一,干扰较少,有利于对目标的准确跟踪[1]。综上所述,宜利用空中小目标的红外视频图像进行检测与跟踪。
本文利用小型降落伞目标的红外视频,首先通过去除噪声、背景抑制、目标增强3个步骤对图像进行预处理,以提高目标与背景的对比度;通过轮廓边界检测得到目标的位置信息;最后将检测结果传递给跟踪器,利用检测得到的目标位置信息通过核化相关滤波算法,对目标进行跟踪定位。该方法的流程如图1所示。
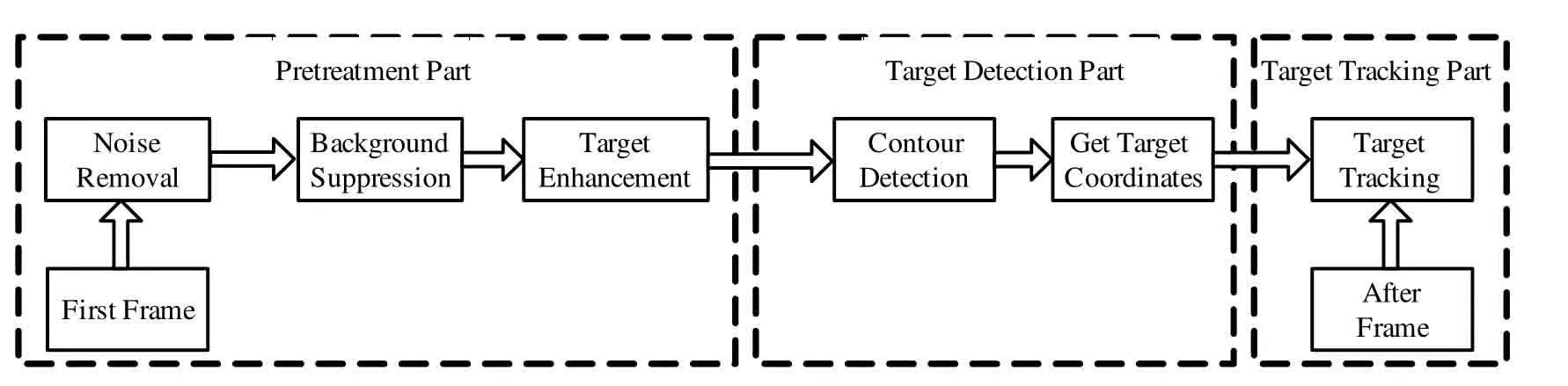
图1 检测跟踪算法流程图Fig.1 Flowchart of detection and tracking algorithm
1 红外目标检测
1.1 图像预处理
红外图像预处理的目的是提高图像的信噪比,通过减少杂波干扰、抑制背景噪声、增强目标显示效果,进而提高检测器的检测性能。
1.1.1 去除噪声
常用的图像滤波算法包括高斯滤波、最大均值滤波、中值滤波等,考虑到红外小目标具有尺寸小、像素有限、灰度变化不稳定以及背景分布不均匀等特点[2],同时应兼顾算法的运算速度,故采用高斯滤波法对输入图像进行去噪处理,结果如图2所示。
1.1.2 背景抑制
背景抑制目的是抑制背景杂波和点噪声的干扰,同时有效地保留目标信息。本文采用形态学Top-Hat算子[3]对输入图像进行背景抑制处理。
数学形态学运算包括两个基本运算:膨胀和腐蚀。设f(x,y)是原始灰度图像,B(p,q)为结构算子。则结构算子对原始灰度图像的膨胀(f⊕B)和腐蚀运算(f⊕B)的定义分别为:

基于膨胀和腐蚀运算,形态学开运算(f˅B)和闭运算(f˄B)定义为:

Top-Hat算子定义为:

由于(3)式中开运算的作用为平滑图像中的亮小区域。公式(5)表明,形态学Top-Hat算子是从原图中减去开运算后的图,虽然该方法会使得目标被一定程度的削弱,但整个背景的灰度值被显著降低。由图3可知,将去除噪声后的图像与Top-Hat算子进行运算,达到了较好的背景抑制效果,目标与背景的对比度更加显著。
1.1.3 目标增强
目标增强算法是通过一定方法提升红外图像中的目标部分的像素值,增加与背景之间的对比度,进而可以更容易地检测出红外图像中的弱小目标[4]。我们通过设定像素阈值(本实验设为10)的方法,将图像中大于该值的像素值等比放大,使得在背景抑制过程中被削弱目标得到显著增强。实验结果如图2所示。
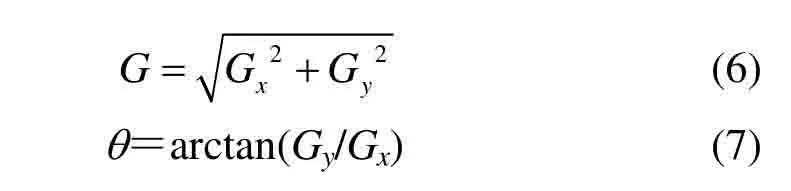
为了更直观地判断预处理效果,我们以图片的长和宽为横坐标X和纵坐标Y,像素值为垂直坐标Z,建立三维图像模型如图3所示。
由图可知,图像经预处理后,目标与背景的对比度得到显著增强,更有利于目标的检测与定位。
1.2 目标轮廓检测
在对输入图像进行预处理后,图像中目标的边缘像素变化较为明显,故可以先计算图像中各像素点的梯度强度G及方向θ:

图2 红外图像预处理效果对比Fig.2 Comparison of infrared imagepreprocessing effect
式中:Gx、Gy分别为像素点在x、y方向上的梯度分量。
通过非极大值抑制消除杂散效应;通过双阈值检测实际边缘位置[5];将变化较为明显的像素储存为向量形式,最后得到这些向量的最小外接正矩形,获取目标的坐标信息并传递给跟踪器。检测结果如图4所示。其中前两个量为目标外接矩形框的左上角坐标值(x,y),后两个量为矩形框的宽度和高度(w,h)。该参数用于跟踪器的初始化。
2 核化相关滤波跟踪算法
核化相关滤波(kernelized correlationfilter,KCF)算法[6]借鉴了信号处理中相关滤波的基本原理,通过寻找最大响应值的方式来确定目标位置。该算法利用循环矩阵在目标区域进行循环位移构造大量样本,解决了目标跟踪过程中训练样本过少的问题,同时利用循环矩阵对角化的性质使得计算大大简化。将线性空间的脊回归函数通过高斯核函数映射到非线性空间,并同样可以利用循环矩阵的性质简化计算,因此该算法具有极高的跟踪速度以及较好的跟踪精度。其基本流程如图5所示。
算法的核心问题可以表示为:

式中:w是列向量表示权重系数;z表示样本。利用岭回归的方法,其优化函数可由最小二乘以及正则项组成:

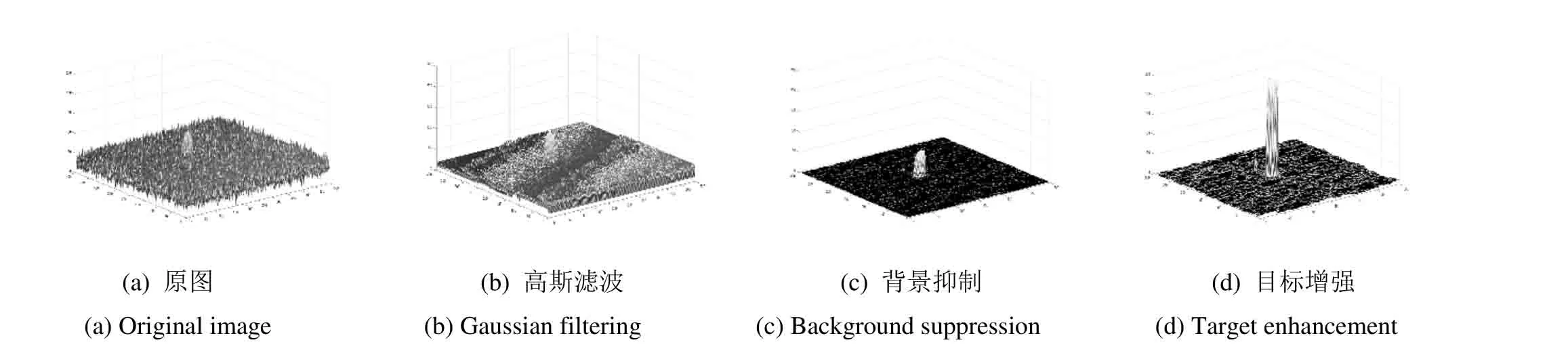
图3 三维图像模型对比Fig.3 Comparison of 3D image models
图4 检测结果Fig.4 Detecting results
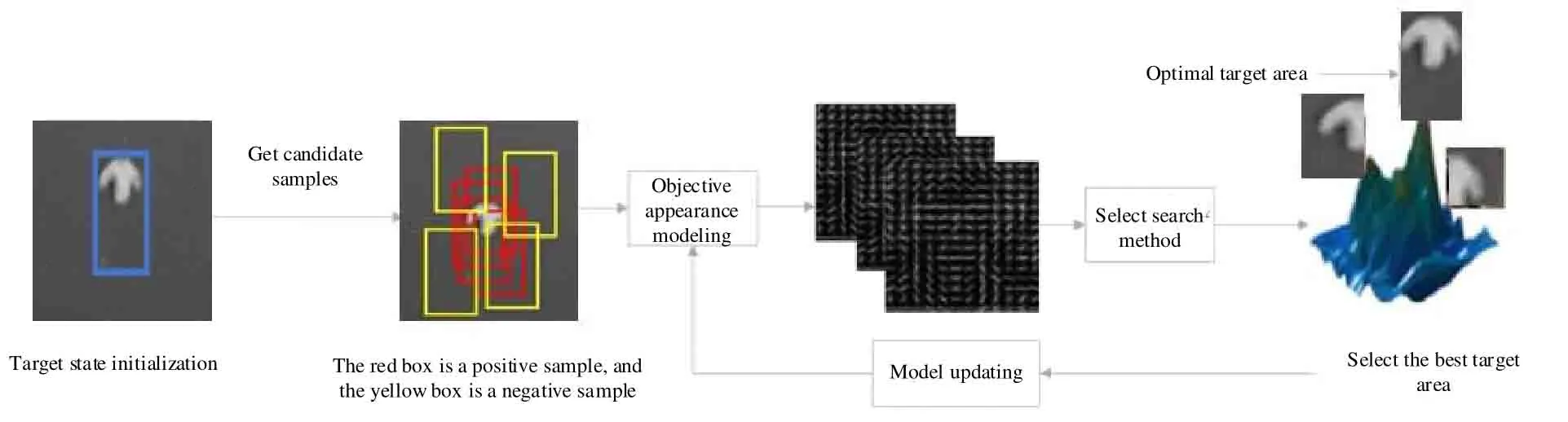
图5 KCF 跟踪算法流程Fig.5 KCF trackingalgorithm flow
式中:λ用于控制系统的结构复杂性;x为样本行向量;y为目标函数。若直接求解可得:

由于共轭以及求逆的计算量较大,故引入核函数将问题简化为:

式中:α为引入核函数后w对应解,利用循环矩阵有关性质,将训练过程进一步简化为:

式中:˄表示复域的计算,由此即可用此滤波器来对输入图像进行相关性检测得到跟踪结果,用公式表示为:

3 实验结果与分析
为了对跟踪算法性能进行定量测试,我们利用图像标注软件得到测试视频每一帧目标位置的标准值,通过将跟踪器目标位置预测值与标准值进行对比,进而计算中心误差以及重叠率。
3.1 中心误差
中心误差[7]可定义为算法估计的目标位置的中心点与实际目标的中心点的偏差距离,而中心误差率为这两者的距离小于给定阈值的视频帧占视频总帧数的百分比。阈值不同,得到的百分比不一样,因此可以得到一条曲线。本实验中跟踪算法的中心误差及误差率变化曲线如图7所示。
由图7可知,当中心误差率阈值为0.6个像素时,KCF算法的成功率约为90%;中心误差不超过0.8个像素时成功率接近100%。
本实验中摄像头的视场角为5°,由图像分辨率为640×512,故单位像素对应角度可近似为:5°/640≈0.0078°。则算法成功率为90%时,角度误差不超过0.0047°;最大误差不超过0.0062°,可以认为跟踪器在整个过程中始终没有丢失目标。
3.2 跟踪速度
实验条件及结果如表1所示。

表1 实验条件及跟踪速度Table1 Experimental conditions and tracking speed
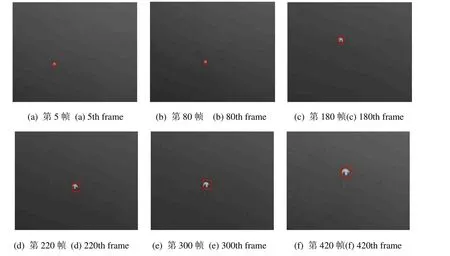
图6 KCF 吊伞模型跟踪结果Fig.6 Tracking results of KCF umbrella model
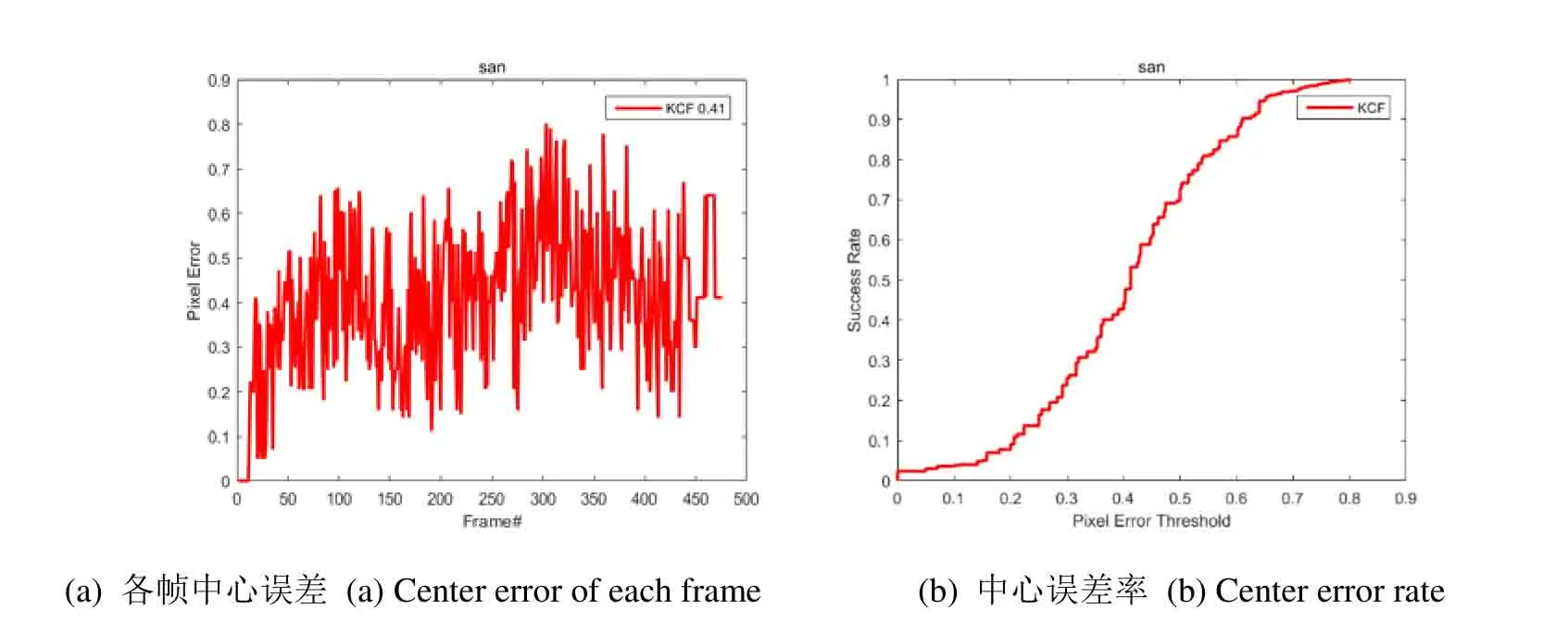
图7 吊伞模型目标跟踪中心误差Fig.7 Target tracking center error of parasol model
由实验结果可知,算法在对该空中红外小型降落伞目标的检测及跟踪较为精确,能够在准确检测到目标后对目标进行稳定跟踪,且能够满足实时性要求。
4 总结
提出了一种人不在回路的对空小目标检测跟踪方法,针对红外弱小目标图像像素有限、灰度变化不稳定以及背景分布不均匀等特点,通过图像预处理,保证了边缘轮廓检测效果的可靠性[8-9];采用相关滤波跟踪算法,保证了该方法的实时性。最后通过实验可知,该方法运行速度可达25.3 帧/s,且对于该类目标的视角误差不超过0.0062°,跟踪精度较高,进一步印证了本方法在实际应用过程中的可行性,为有效打击空中小型目标提供了新的思路。
猜你喜欢
温州大学学报(自然科学版)(2022年2期)2022-05-30
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
建材发展导向(2021年23期)2021-03-08
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
电子制作(2018年16期)2018-09-26
制导与引信(2017年3期)2017-11-02
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
