
无线智能浇花机械手控制系统设计与实现
2020-05-07 01:25刘忠强张春晓孔祥飞申安安
山西电子技术 2020年2期
刘忠强,张 立,张春晓,孔祥飞,申安安
(沈阳仪表科学研究院有限公司,辽宁 沈阳 110043)
0 引言
随着人们生活质量的提高,越来越多的人开始丰富自己的生活,尤其是生活在大城市的人,他们由于周围绿色植物的缺失,慢慢地开始在自己家里面种花养草,这对于生活压力巨大的城市人来说是一种能释放压力的方式。但是有时候由于工作、旅游等事情使人没法照顾植物,导致植物干枯死亡,尤其是在夏天炎热之际,所以远程的智能控制浇花势在必行[1,2]。机械手臂在各种领域都能见到它的身影。多种控制方式不仅让使用者体验到这个过程的有趣性,也使机械手臂的控制更具多样性。本文结合GSM技术和语音识别技术,以及手机软件的特点设计出一种能够控制机械手臂浇花的系统。
1 系统功能介绍
本文的控制方式有三种:语音、短信和手机App。三种方式都可以对机械手臂进行控制,其中语音控制是需要近距离口令;手机蓝牙控制也需要在一定范围内操纵[3,4];短信控制则在任何有GSM信号的地方使用,发条短信即可完成。机械手臂的动作通过上位机编程,三种控制方式发送指令成功后,机械手臂便可产生相应地浇花动作,本文使用的是“玫瑰花”和“兰花”。系统方框图如图1所示,硬件部分的语音指令和短信指令发送到STC15单片机,然后传到机械手臂完成相应的任务,软件部分的手机App直接发送到机械手臂完成动作。

图1 系统方框图
2 系统硬件设计
2.1 STC15单片机最小系统
STC15单片机最小系统的作用是把语音识别模块和短信模块传输过来的数据处理一遍,再发送到机械手臂上完成相应的动作。
2.2 语音模块硬件电路
语音模块LD3320不仅集成了语音识别处理器还包括一些外部电路,所以简单的外部电路便可以供其使用,该芯片也不需要外界任何的辅佐芯片,所以直接与单片机相连传输数据就可以完成硬件电路的连接。这部分电路设计保证了LD3320芯片的正常工作,也保证了与STC10L0SXE单片机之间的相互通信。
2.3 短信控制电路
SIM900a电路的9脚和10脚连接的是串口TXD和RXD。这部分电路设计为SIM900a电路提供正常工作的环境,并可以利用串口与该芯片通信[5]。
3 系统程序设计
3.1 短信模块程序设计
短信模块工作的流程图如图2所示,上电之后SIM900a便开始自行搜索SIM手机卡的网络,搜索到之后,硬件电路上的指示灯闪一下歇三秒,然后通过串口发送AT指令之后便可等待短信的发送。当短信接收到时,SIM900a便经过串口把接收到的数据全发送到单片机或电脑上,然后返回等待下一条短信的到来。
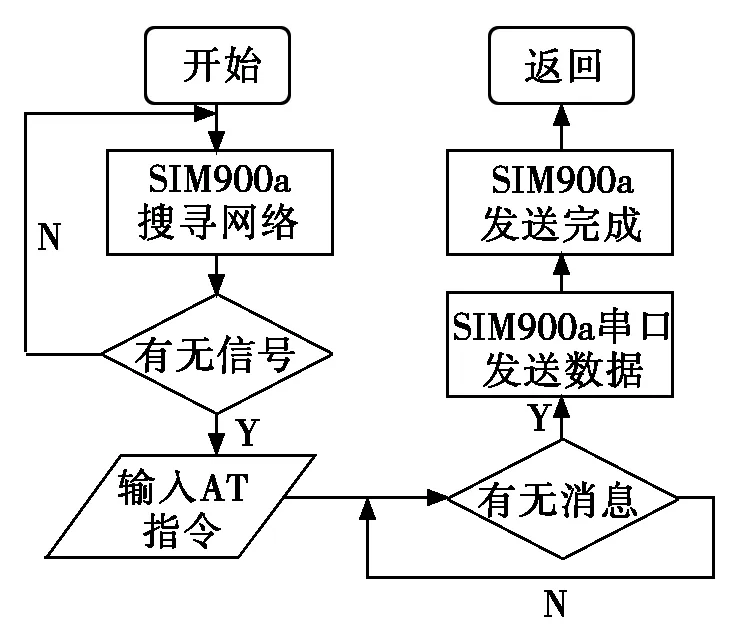
图2 短信模块流程图
3.2 语音模块程序设计
上电之后模块芯片就开始初始化,然后芯片写入自己定义的识别列表,完成这些内容后便可以语音识别。当模块检测到有声音时就会打开语音识别中断,调用相关的寄存器开始对比,如果声音信息和写入的识别列表有相同的词,便可以开始后续的发送指令;如果不一致则返回到语音识别待机状态,等待下一次的识别。
3.3 STC15系列单片机串口程序设计
我们使用了STC15系列单片机三个串口,这三个串口的部分初始化程序,包括定时器、波特率和中断的设置。串口一的定时器为TR1=1,串口二的定时器为AUXR|=0x10,串口三的定时器为T4T3M|=0x08。
3.4 手机App程序设计
手机App程序在运行该手机App后程序会在后台访问蓝牙,确认蓝牙有没有被打开启用,如果没有则弹出打开蓝牙的对话框,如果蓝牙已被打开则打开App界面可以开始操作。界面上有个“连接机械手臂”的按键,按下之后蓝牙开始搜索机械手臂上的蓝牙,如果搜索到了则会自动连接该蓝牙,没有则会一直搜索10s,然后停止。连接上机械手臂上的蓝牙后弹出提示框,便可以控制机械手臂浇花了,程序会监测按键是否被按下,按下了便自动发送浇花指令,发送完毕后程序返回等待按键再次按下。
3.5 机械手臂动作部分程序设计
机械手臂的动作设计部分使用配套的上位机软件编辑而成,可以设置每个舵机的舵机位置滑杆、舵机位置、舵机偏差滑竿、舵机偏差,这些设置完之后保存在机械手臂的控制板里,使用时调用即可。六个舵机的角度设置由自己定义,我们要浇不同的花,只需要设置最下面的舵机角度就行。
4 系统调试
图3是本文设计的手机App展示界面。如图4所示是短信模块、语音模块、STC15单片机以及机械手臂控制板的总体连接。我们设计的动作流畅,能够真实的取水和浇水,三种控制方式也很流畅。

图3 手机App界面

图4 硬件电路总连接
5 结论
本文设计的无线智能浇花机械手臂有三种控制方式:语音识别控制、短信控制、手机App控制。这三种控制方式各有特点。这三种控制方式彼此联系又相互独立,不会发生冲突,让使用者无论在家还是在外都能轻松的照顾植物。本文的设计中有软件设计,也有硬件结合,将无线传输融合,构成了多种控制的机械手系统,丰富了机械手臂的使用领域,这是非常重要的。
猜你喜欢
商品与质量(2021年43期)2022-01-18
气象水文海洋仪器(2021年3期)2021-10-15
今日农业(2020年14期)2020-12-14
计算机技术与发展(2020年4期)2020-04-30
现代计算机(2020年3期)2020-03-05
电子制作(2018年1期)2018-04-04
数码世界(2017年5期)2017-06-06
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
少儿科学周刊·少年版(2015年4期)2015-07-07
