
基于OpenCV的地下交通工程病害检测系统*
2020-05-07 01:25高晶
山西电子技术 2020年2期
高 晶
(山西省信息产业技术研究院有限公司,山西 太原 030012)
0 引言
地下交通工程主要包括了城市轨道交通工程及公路隧道工程。城轨交通方面,截至2018年底,我国共有35个城市开展了城市轨道交通建设,运营线路185条,总长度5761.4 km,2018年全年累计完成客运量210.7亿人次;公路隧道方面,截至2018年底,我国公路隧道为15987处、14158.7 km。其中,特长隧道815处、3622.7 km,长隧道3520处、6045.5 km。随着交通运输业的迅速发展,运营隧道的数量爆发式增长,隧道维护及隧道病害处理方面的工作愈发重要。隧道病害主要包括衬砌裂纹、隧道渗漏水、隧道冻害及空气污染等几方面,其中,裂纹病害及渗漏水现象又存在安全隐患大、发生概率高等特点,是维护工作重点需要解决的问题。传统裂纹病害及渗漏水检测依靠人工方式实现,在隧道停止运营的有限时间内开展人工巡视,作业环境差、效率低、受主观影响大。随着机器视觉等先进技术的发展,将OpenCV图像处理技术应用于裂纹病害及渗漏水检测,是目前隧道维护自动化检测研究的热门方向之一,其具有检测效率高、准确度高、自动化智能化程度高等特点,在替代传统的地下交通工程病害检测方面具有重要的实用价值[1]。
1 图像处理方案设计
地下交通工程病害检测系统主要实现裂纹病害及渗漏水现象的智能识别及标注;应用OpenCV图像处理技术及机器视觉图像采集技术。系统主要包括了图像载入、图像阈值化、中值滤波、Canny边缘检测、形态学变换及标注病害等6个部分。
1.1 图像载入
图像采集硬件系统利用4K线扫相机组成环形阵列,实现隧道衬砌表面图像采集,与编码器联动输出4000*4096规格的原始图片,保存于硬盘。软件系统依托图形工作站的强大处理能力,调用原始图片进行图像处理及病害识别。
1.2 图像阈值化
本系统主要处理的隧道表面图像由于光照、现场环境等原因,均存在对比度较低的问题,故首先采用全局直方图均衡化的方法实现图像增强,其主要步骤为:计算图像的灰度直方图;计算灰度直方图的累加直方图;输入灰度级和输出灰度级之间的映射关系;根据映射关系循环输出图像每一个像素的灰度级。其中的映射关系是:
增强后的图像即进行阈值化操作,将图像上点的灰度置为0或255,得到的二值化图像有利于进一步处理,且图像的集合性质只与像素值为0或255的点的位置有关,不再涉及像素的多级值,使后期处理变得简单,数据的处理和压缩量小。图像阈值化操作采用局部阈值化的方法完成,根据像素邻域块的像素值分布来确定该像素位置上的二值化阈值,每个像素位置处的二值化阈值不是固定不变的,而是由其周围邻域像素的分布来决定的。不同亮度、对比度及纹理的局部图像区域将会设置相对应的局部二值化阈值[2]。图像增强及阈值化操作后的图像如图1所示。
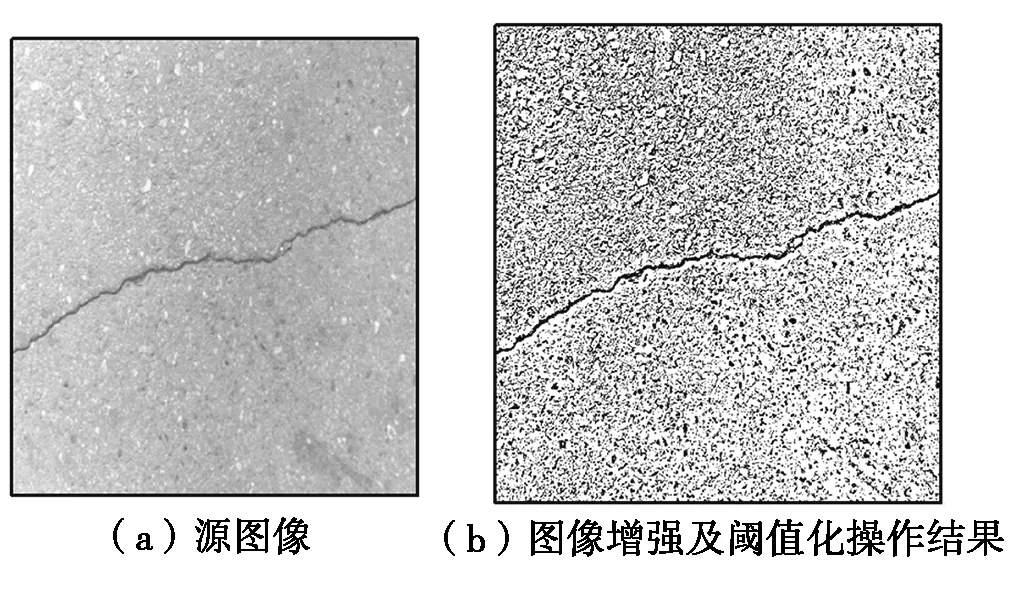
图1 图像增强及阈值化操作
1.3 中值滤波
中值滤波是一种非线性滤波器,本质上是统计排序滤波器的一种,中值滤波对图像特定噪声类型(例如椒盐噪声)会取得比较好的去噪效果,是常见的图像去噪声与增强的方法之一。中值滤波在其对应ROI区域下对所有像素值排序,取中值作为中心像素点的输出值。中值滤波处理后的图像有利于保留边缘的尖锐度[3]。
结合隧道表面图像的特点,使用OpenCV中值滤波函数medianBlur(),通过mask operation操作实现滤波功能,将ksize参数设置为7,得到的滤波后图像如图2所示。

图2 中值滤波操作
1.4 Canny边缘检测
Canny边缘检测是由Laplace滤波器改进而成的边缘检测算法,其基本思想是对图像选择一定的Gauss滤波器进行平滑滤波,然后采用非极值抑制技术进行处理得到最后的边缘图像,具有错误率低、定位良好、最小响应等特点,能够快速高效地实现图像特征边缘的检测与提取[4]。Canny边缘检测一般分为4步:噪声去除、计算图像梯度、非极大值抑制、滞后阈值。
本系统使用OpenCV边缘检测值函数Canny(),将(threshold1,threshold2)阈值分别设置为(10,150),得到的边缘检测图像如图3所示。
1.5 形态学变换
形态学变换是基于图像形状的一种操作,基础操作为腐蚀和膨胀,另外还衍生出开运算、闭运算、梯度运算等。针对边缘检测操作处理后的图像,本系统采用闭运算的操作对图像进行处理。闭运算先膨胀再腐蚀,用来排除小型空洞、平滑物体轮廓、弥合(连接)窄的间断点沟壑以及填补轮廓线断裂[5]。
本系统选取的结构化元素为MORPH_RECT、(5,5),处理后图像中检测到的轮廓基本被填充,得到的形态学变换图像如图4所示。

图4 形态学变换操作
1.6 标注病害
经以上处理,最后对图像中的填充区域进行病害特征的标注,标注时可根据隧道病害维护工作积累的经验,对病害特征的面积、周长等信息设置合理的阈值,实现数据的再次去噪及智能化选择。病害特征使用红色字体标注在原始图像上,识别效果突出,易于用户对照检查。图像标注病害后的结果如图5所示。
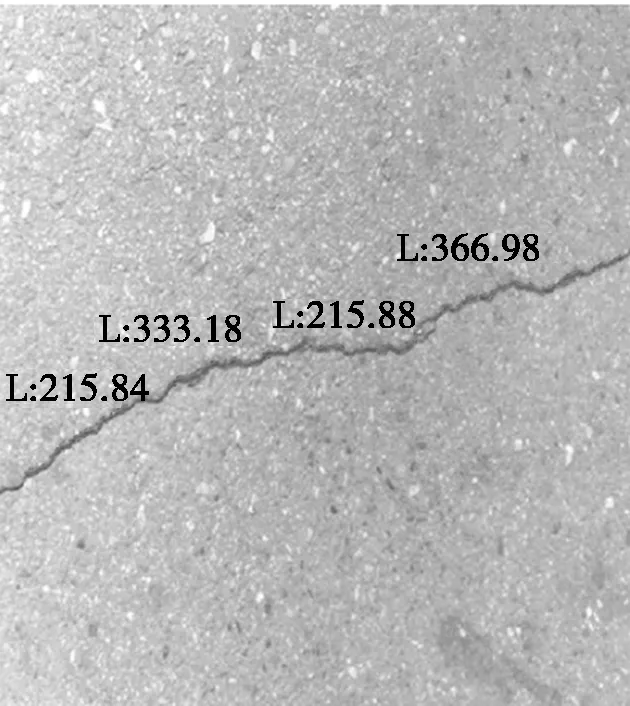
图5 病害标注结果图
2 系统测试
选取某地铁隧道衬砌表面拍摄图像,合成后图像质量为4096*16000,图像大小约60M,达到病害检测精度要求。图像经人工排查存在裂纹及渗漏水的病害现象。应用地下交通工程病害检测系统对图像进行处理,能够识别标注衬砌表面存在的裂纹现象,并计算裂纹长度;能够识别标注衬砌表面存在的渗漏水现象,并计算渗漏水污染的面积;能够自定义输出检测结果报表用于人工核验。部分检测结果如图6所示。同时,在进行了大量的人机检测与对比后得出,该系统的检测精度达到mm级;对图像中存在的裂纹病害及渗漏水现象检出率达到95%以上;在所检出的病害现象中,误报率控制在6%以内,并能够通过场景内大量检测数据调整检测阈值,进一步降低误报率。

图6 病害检测结果
4 结论
本文对基于OpenCV的地下交通工程病害检测系统中的图像处理部分做了详细叙述。通过测试,系统能够有效地检出图像中存在的裂纹及渗漏水病害,并能够实现自定义方式的干扰信息过滤,避免了地下交通工程复杂环境对检测过程的影响。系统应用于实际工作,能够取代传统人工巡检方式,提高地下交通工程运维工作效率。另外,研究过程中发现,在地下交通工程环境下开展图像采集工作,对光源的要求极为严格,光照不均及照度不足会加大后期图像处理难度,故而应使用大功率稳定LED光源或配套的激光光源作为图像采集光源;其次,在检测数据积累到一定的规模,可以引入深度学习的方法,构建、训练模型实现隧道病害现象的自主检测,进一步提高检测工作的智能化水平。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年18期)2018-11-14
电子制作(2018年16期)2018-09-26
通信产业报(2016年44期)2017-03-13
火控雷达技术(2016年3期)2016-02-06
雕塑(1999年2期)1999-06-28
