
基于复合控制策略的三相逆变研究
2020-05-06 10:50陈翰峰关世荣
通信电源技术 2020年24期
李 文,陈翰峰,关世荣
(国网宁东供电公司,宁夏 灵武 750411)
0 引 言
随着当今电力电子技术的不断推进和快速发展,逆变在船舶、航空航天、石油、冶金以及通信交换机等领域都有着非常广泛的应用[1]。三相逆变拥有较强的向不平衡负载供电的能力。通常不平衡负载条件会引起输出电压不平衡,从而导致三相逆变电源不能正常工作,因而对提高三相逆变电源带不平衡负载能力进行分析和研究具有深刻意义[2,3]。
目前,矫正三相逆变器在不平衡负载下输出电压不对称的措施中,主电路主要包括三相分裂电容式逆变拓扑、三相四桥臂逆变拓扑以及插入Δ/Y变压器拓扑[4-6]。但几种拓扑都有它们的缺陷,三相分裂电容式逆变拓扑存在非常大的电容均压问题,直流电压的利用率非常低[7]。三相四桥臂逆变拓扑多加了一个桥臂,一定程度上达到了抑制输出电压不平衡的效果,但同时也使控制更为复杂,难以设计参数。组合式三相逆变拓扑主要是由3个单相逆变器相互独立组合而成,因此在开关管的使用数量上会比较多,增加了控制难度。
本文针对不平衡负载下三相逆变器输出对称电压问题,建立了三相三线制逆变器的数学模型,提出了一种结合重复控制和双环控制方法的复合控制方法,实现了控制方法上的改进,明显提高了逆变器带不平衡负载能力[8]。
1 三相逆变器数学模型
三相逆变器主电路拓扑图如图1所示,主要由电容C、三相滤波电感L以及三相逆变桥构成,r为等效阻抗及损耗。其中,逆变器的输出电压为UAB、UBC、UCA,电容电压为Uab、Ubc、Uca,电感电流为iA、iB、iC,负载电流为ia、ib、ic。

图1 三相逆变器主电路拓扑图
Clark变换能够得出三相逆变器在静止坐标系下的数学模型,再经过Park变换,可得:
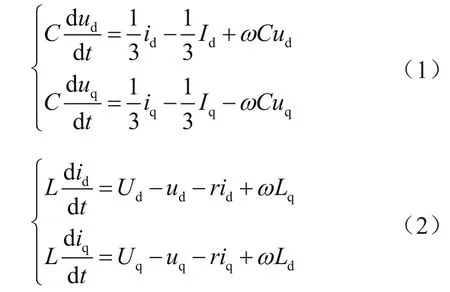
得到d-q旋转坐标系下三相逆变器的数学模型,由三相静止a、b、c坐标系变换至两相旋转d-q坐标系可以得到矢量图。
如果将三相逆变器的输出电压设置为:
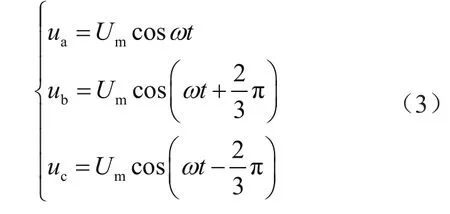
再将逆变器的三相输出电压转换至两相旋转d-q坐标系下得:

从上述各个坐标系下三相逆变器的数学模型可以看到,逆变器输出的三相电压变换至旋转坐标系下直轴分量为相电压峰值,交轴的分量为零,所以只存在直流的分量。
2 逆变器控制系统设计
当三相逆变器工作在非线性负载及不平衡负载时,输出电压存在周期性扰动,可使用重复控制的方法来抑制这种扰动。
2.1 电压电流闭环控制器设计
双闭环控制器主要包括电流内环控制器和电压外环控制器两部分,电流内环控制器能够使逆变器快速跟踪实际输出电流,从而实现快速响应,电压外环控制器可以使输出电压维持稳定。针对逆变器的耦合现象,采取前馈解耦控制方法对电压电流进行解耦。采用PI调节器来控制电流内环。电流控制方程式为:
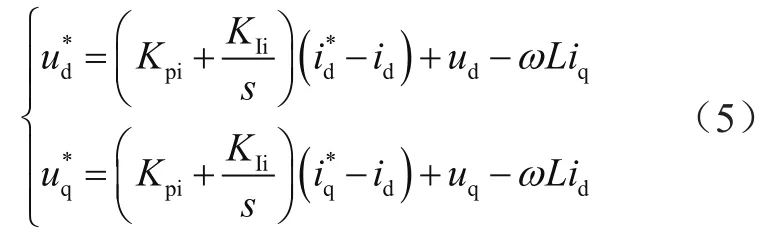
电压控制方程式为:
式中,Kpi是PI调节器的比例系数;Kpv是PI调节器的积分系数;id*和iq*电流内环的参考电流。由式(5)和式(6)可得:
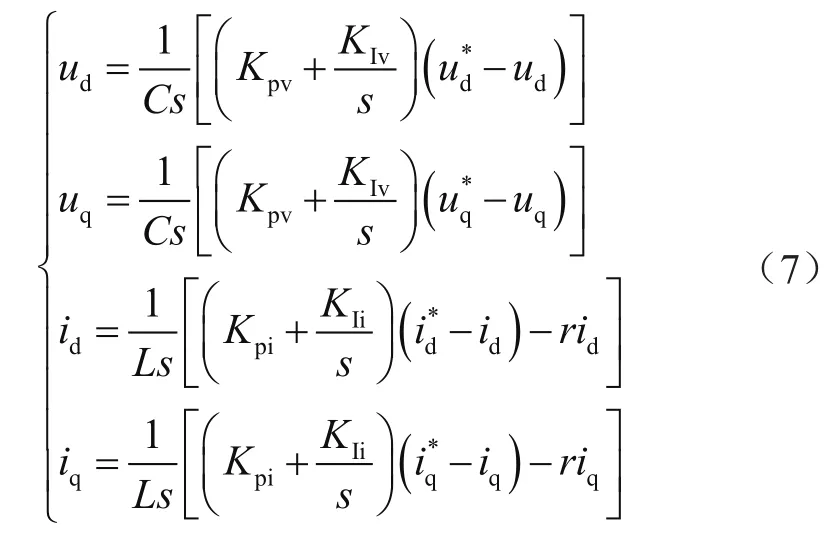
由式(7)可知经过解耦控制后,系统完成了电压和电流的解耦。在电流环的控制之下,iq=0,动态过程中id的变化也非常的小。同时在直流电压出现大的变化前,iq就已经完成了瞬态过程达到零的状态,所以q轴电流带来的影响可以忽略。此时,由电流环闭环的传递函数得:

式中,Tis=L/KpiKPWM。由式(8)可以看出,d-q轴上的电压和电流之间已经不存在耦合关系,通过上述方程可以画出这个解耦合系统的控制框图,如图2所示。

图2 解耦合系统控制框图
2.2 重复控制器设计
重复控制在逆变器中有着广泛的应用。该系统的主要控制方法是基于系统内模原理,即在重复控制系统内部加入一个可以对该系统被控制信号特性进行良好描述的“内模”,通过这种方式来解决被控信号无静差跟踪的问题,提高控制精度。重复控制系统的核心就是内模,重复控制的性能就在于内模的建立,相当于以一定的周期作为步长的一个积分,从而实现跟踪给定信号。若重复控制系统稳定,其约束条件为||1-P||<<1。然而系统在运行过程中不能满足约束条件,因此进行改进,在反馈回路中加入辅助补偿器Q替换z-N,以此确保系统的稳定性。可得:

式中,N为基波周期采样次数,能够加强系统稳定性,本文取0.95;z-N为周期延迟环节;U0(z)为内模输出。在改进内模结构上增加辅助补偿器S和周期延迟环节z-N,完整的重复控制器得以构成。但需要注意的是,如果对象P(z)有单位圆外的零点,处于这种状态下的补偿器是不稳定的,会影响重复控制系统的稳定性。针对这一问题改进补偿器的形式,改进后的变形形式为:

式中,Kr为补偿器增益,用来调整输出幅值,一般0<Kr<1;zk为超前环节,主要作用是补偿滤波器相位;S'(z)为低通滤波器,用来消去P(z)过高的谐振尖峰。通过超前环节对内模输出信号的相位提供补偿,接着再串联一个低通滤波器,形成一个高稳定性的控制器。
3 仿真分析
将本文建立的三相逆变电源模型在MATLAB/Simulink仿真软件上进行仿真,进而验证所设计复合控制策略的正确性。系统的主要参数为直流输入电压Ui=200 V,滤波电容C=4.7 μF,Rf=0.07 Ω,滤波电感L=11.25 mH,滤波电感的内阻R=2 mΩ,额定输出频率f0=400 Hz,开关频率为10 KHz。
系统两相负载运行过程中,从0.1 s时突然增加一相负载,由复合控制系统和双环控制系统输出电压和电流的仿真波形可以看到复合控制系统在0.1 s前后电压波形变化不大,即复合控制系统在缺失一相负载时依旧保持输出电压平衡。双环控制系统在0.1 s前存在着严重的电压不平衡现象,0.1 s后恢复平衡。因此,复合控制系统输出的波形效果更好。
4 结 论
本文构建了三相三线制逆变器数学模型,在分析设计了重复控制以及双环控制两种逆变器控制方法后,提出一种结合两者的复合控制方法。并且通过MATLAB/Simulink仿真试验和多次仿真波形比对,可以发现逆变器在复合控制下拥有比双环控制更好的抑制输出电压畸变的能力。且逆变器在各种负载下都能正常工作,且输出很对称的电压。同时,系统的响应速度快,且控制方法结构也相对简单,易于控制。
猜你喜欢
科学导报(2022年41期)2022-07-13
导弹与航天运载技术(2022年2期)2022-05-09
安徽农学通报(2022年8期)2022-05-06
珠江水运(2021年8期)2021-05-24
成都信息工程大学学报(2021年6期)2021-02-12
云南医药(2020年5期)2020-10-27
玻璃(2019年3期)2019-04-01
电机与控制学报(2018年9期)2018-05-14
家用汽车(2016年12期)2017-02-09
飞碟探索(2016年11期)2016-11-14
