
新型定力矩套筒的设计仿真及实验
2020-04-30 18:32林楠张秀娟王大萌
北京联合大学学报 2020年2期
关键词:套筒
林楠 张秀娟 王大萌
[摘 要] 在生活生产中常用的拧紧螺栓的工具中,高效的螺栓拧紧工具无法做到定力矩拧紧,而具有定力矩功能的螺栓拧紧工具价格昂贵且效率不高,需要设计一款高效可靠的定力矩套筒。首先,建立三维模型,对其工作原理进行详细的说明,为后续的有限元分析提供参考;其次,利用ABAQUS进行显式动力学分析,检查材料是否容易损坏;最后,经过仿真和实验,表明此定力矩套筒具有一定的定力矩拧紧功能,且成本低、操作简单,适合用于低速旋转的场合中。
[关键词] 定力矩;套筒;显式动力学
[中圖分类号] TH 135 [文献标志码] A [文章编号] 1005-0310(2020)02-0020-06
Design and Simulation of a New Type of Fixed Torque Sleeve
Lin Nan,Zhang Xiujuan,Wang Dameng
(School of Mechanical Engineering, Dalian Jiaotong University, Dalian Liaoning 116028, China)
Abstract: Among the bolt tightening tools commonly used in life production, the efficient bolt tightening tool cannot achieve the fixed torque tightening, but the bolt tightening tool with the fixed torque function is expensive and inefficient. Therefore it is necessary to design an efficient and reliable fixed torque sleeve. Firstly, a three-dimensional model is established and its working principle is explained in detail to provide reference for the subsequent finite element analysis; secondly, the explicit dynamic analysis using ABAQUS is used to check whether the material is easily damaged; finally, after simulation and experiment, it is found that the fixed torque sleeve has certain fixed torque tightening function, is low in cost and simple to operate and suitable for occasions with low-speed rotation.
Keywords: Fixed torque;Sleeve;Explicit dynamics
[收稿日期] 2019-12-29
[作者简介] 林楠(1995—),男,辽宁大连人,大连交通大学机械工程学院硕士研究生,主要研究方向为机械设计及理论;张秀娟(1971—),女,辽宁大连人,大连交通大学机械工程学院教授,博士,主要研究方向为机械设计及理论;王大萌(1993—),男,辽宁辽阳人,大连交通大学机械工程学院硕士研究生,主要研究方向为机械设计及理论。E-mail:1351828707@qq.com
0 引言
螺纹连接具有很广泛的应用,在对螺栓拧紧的过程中,保证上紧后的螺栓预紧力可控是确保螺纹连接可靠的关键,否则可能出现超拧或者欠拧的现象,超拧可能会使螺栓副发生断裂或延迟断裂等严重的问题,而欠拧可能会造成螺栓副在长时间受力后出现松动的情况[1-2]。在很多情况下,需要定力矩上紧的螺栓由于其他结构遮挡,普通力矩扳手没有足够的回转空间,需要拆卸遮挡的部件才能正常使用,这就造成了许多不便。目前,常用的定力矩螺栓拧紧方法有以下两种:普通定力矩扳手,需要较大回转空间,效率低;电动定力矩扳手,价格约为3 000元以上,空载转速为10~30 r/min,价格较高,效率较低。据了解,普通电动扳手尺寸小,价格低,操作简单,但无法保证定力矩输出。如果在普通电动扳手上加装定力矩套筒,就可以兼顾使用空间和成本。
1 研究现状
杨德勇设计了一款定力矩气动扳手,通过独创的片簧-转子机构实现定力矩,并使预置力矩可调[3]。欧阳俊在研究大型数显气动扭矩扳手中,通过行星轮系提高输出扭矩,利用电磁传感器对转角进行扭矩控制,通过报警装置与显示屏联合反馈拧紧力矩的情况[4]。张胜生研发了一款低扭矩数显扳手,利用电阻应变式扭矩传感器检测扭矩并显示到屏幕上,用声光报警的方式实现过力矩提示[5]。李晶设计了一款基于霍尔传感器监测控制扭矩的电动扳手,处理后的扭矩信息通过数码管进行显示,该扳手整体控制功能简单,控制精度稍低[6]。李金梁应用LABVIEW作为上位机编程软件,并且利用ZigBee协议实现底层控制设备和上位机的无线数据传输功能[7]。李叶青开发了一款数控定力矩扳手,输出扭矩为800~3 200 N·m,误差低于3%[8]。张振京利用转角辅助控制功能,研究出一种电动定力矩扳手,并保证了可靠性和安全性[9]。
但是,上述这些研究并没有得到广泛应用,电子式控制扳手虽然精确,但传感器等元件不便于维护,转角控制法虽然控制精准但成本过高。本文拟在已有研究的基础上,进行机械式套筒的设计研究,以实现更高的可靠性及耐用性,更适合在环境条件较差的场所使用,同时也便于降低成本,减小维护难度。
2 定力矩套筒的设计
2.1 三维模型的建立
用三维绘图软件SolidWorks对零件进行三维建模并装配,装配图如图1所示,爆炸图如图2所示。
2.2 工作原理
将定力矩套筒中轴下端的内六角型凹槽嵌入待上紧螺栓头,再使用扳手等上紧工具对上壳体施加扭矩,当螺栓上紧到一定力矩值后,力矩套筒内部的机械结构打滑,停止对螺栓继续施力。
3组弹簧将金属球挤入中轴的凹槽中,当力矩过大,中轴凹坑与金属球接触力增大,沿壓缩弹簧方向的分力也会增大,弹簧被压缩,金属球脱离凹槽使连接螺栓的中轴相对于壳体滑动,实现定力矩。使用蜗轮蜗杆机构调整蜗轮圈,蜗轮圈内侧为凸轮,当蜗杆带动蜗轮转动时,凸轮挤压外侧金属小球调整弹簧压缩量,实现卸荷力矩可微调。其机械结构图如图3所示,三维剖视图如图4所示。
3 定力矩机构的有限元分析
3.1 ABAQUS显式动力学
ABAQUS显式动力学分析产生于实际工程需要,它是一种准确的动态求解方法。相对于隐式动力学分析,显式算法特别适合求解非线性动力学问题,并且节省计算机资源,能高效地解决复杂的问题[10],所以本文使用显示动力学算法分析和解决卸荷机构的接触碰撞问题。
ABAQUS/Explicit中的显式动力学分析过程基于显式分析准则与对角单元质量矩阵共同实现。物体的运动方程式由式(1)和式(2)所示的显式中心差分法的积分准则集成。
u·(i+12)=u·(i-12)+△t(i+1)+△t(i)2u¨(i),(1)
u(i+1)=u(i)+△t(i+1)u·(i+12)。(2)
式中,u为位移,u·为速度,u¨为加速度,上标i表示增量编号,i-12和i+12表示中间增量值。使用前一增量步已知的u·(i-12)和u¨(i)可以计算下一增量步的运动状态,中心差分计算子在这个计算过程中是显式的[11]。
3.2 工作状态分析
对定力矩机构分为两个阶段分析:第一阶段,当金属球均处于凹槽内,逐渐增大扭矩,直到金属球脱离凹槽实现打滑,分析螺栓套筒将螺栓拧紧后打滑的过程;第二阶段,中轴打滑后,分析金属球继续撞击凹槽的过程。
3.2.1 第一阶段
1) 前处理
为分析中轴凹槽与金属球接触位置的应力,将上壳体和中轴简化,只留下有用的零件和特征,并对各零件划分网格,网格类型选用C3D8单元,划分网格后的模型如图5所示。
将所有零件的材料统一设置为45号钢,其材料参数如表1所示。
首先,建立一个显式动力学分析步,分析时长为0.01 s,场变量输出50个画面。
其次,创建通用接触,将整个模型的表面都设置为接触表面。由于金属球表面较光滑,因此法向接触属性为硬接触,切向接触属性为无摩擦。对3个金属球和上壳体添加刚体约束,再创建一个参考点与中轴下表面耦合。因为金属球和上壳体为刚体,无法添加弹簧,因此在连接器中创建弹性轴代替弹簧,劲度系数为2 N/mm。
然后,施加载荷:给3个金属球向中轴方向施加40 N的集中力,模拟弹簧给金属球的压力;在中轴下表面的耦合点施加扭矩,设置扭矩的振幅特性,从开始的0时刻到0.01 s结束期间,扭矩从0.03 N·m均匀增加到3 N·m,模拟逐渐施加扭矩的过程。
最后,添加边界条件:给上壳体添加全约束,仅让中轴有绕轴旋转的自由度和金属球沿滑道方向水平移动的自由度。
2) 结果分析
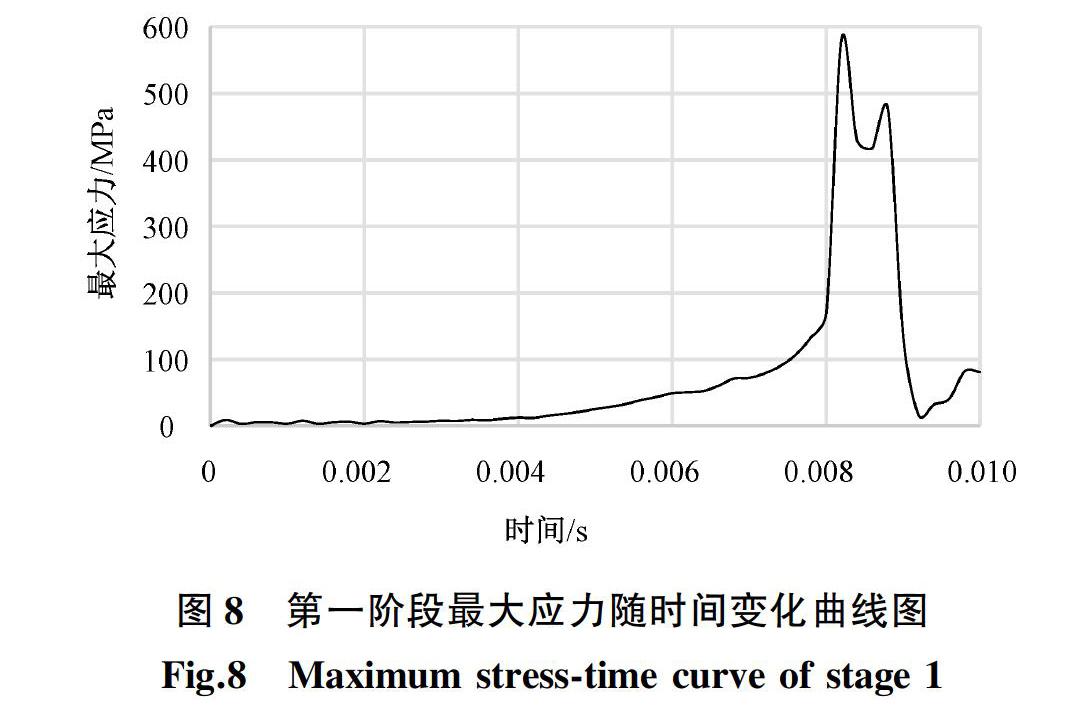
如图6所示,根据消隐了金属球后的Mises应力云图显示,第一阶段的最大应力发生在0.008 2 s时刻,位于凹槽侧棱上与金属球接触点处,最大应力值为581.0 MPa。
图7所示为中轴的最大主应变云图,第一阶段的最大应变发生的时间和位置与最大应力相同,最大值为1.76×10-3 mm。
通过图8最大应力值随时间变化的图像可以看出,从0时刻到0.008 s,随着力矩不断增大,最大应力也不断增大;在0.008 2 s时,力矩增大到特定值,金属球被挤开,导致凹槽侧棱与金属球形成点接触,接触面积变小,最大应力陡增,出现波峰值;而后,金属球被弹开,应力又逐渐减小。
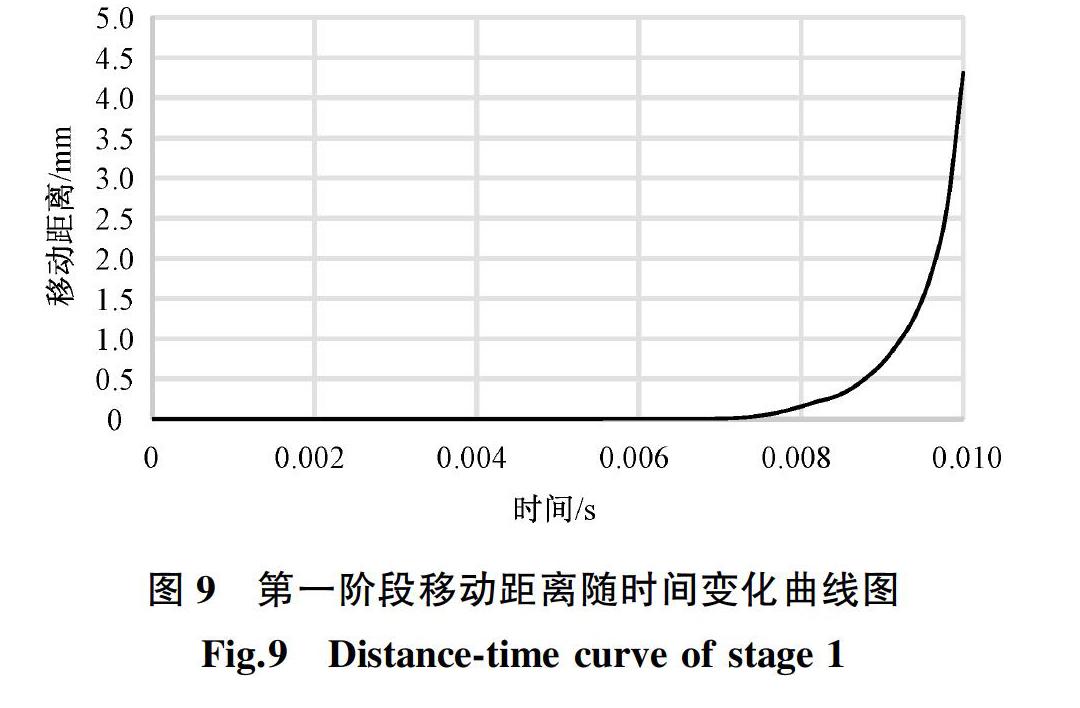
选取中轴外侧圆柱面一点,绘制移动距离随时间变化的图像如图9所示,其意义在于通过点的移动距离可反映出中轴的旋转状态。通过分析图像可知,中轴在0.007~0.008 s之间开始转动,其转速逐渐增大。
选取一个金属球的球心点,绘制移动距离随时间变化图像如图10所示,其反映出金属球在径向方向上的运动状态。通过分析图像可知,中轴在0.007~0.008 s之间开始弹出,其转速逐渐增大,弹出过程用时0.003 s。
3.2.2 第二阶段
1) 前处理
将初始位置设定为金属球即将落入凹槽前的瞬间,划分网格如图11所示。
建立一个显式动力学分析步,分析时长为0.002 s,场变量输出60个画面。
施加载荷的步骤为:由于3个弹簧与第一阶段相比被进一步压缩,压缩量为△x=4.5 mm,由胡克定律F=kx,得增加的弹簧压力为△F=2×4.5=9 N,给3个金属球向中轴方向施加39 N的集中力,模拟弹簧给金属球的压力;在中轴下表面的耦合点施加1 N·m的扭矩。其余设置与第一阶段一致。
2) 结果分析
如图12所示,根据Mises应力云图显示,第二阶段的最大应力发生在0.008 3 s时刻,同样位于凹槽侧棱上与金属球接触点处,最大应力值为8 492 MPa。
最大主应变云图如图13所示,第二阶段的最大应变发生的时间和位置与最大应力相同,大小为0.022 mm。
选取中轴外侧圆柱面一点,绘制移动距离随时间变化的图像如图14所示。通过分析图像可知,中轴在0时刻加速转动,在8×10-4 s时金属球与中轴凹槽侧棱发生碰撞,撞击力对中轴产生了反向力矩使其反向转动,并于1.4×10-3 s时刻停止转动后恢复正向加速旋转。
4 实验及结论
为验证有限元仿真结果的可靠性,需要制作模型加以实验,非标准件采用3D打印制造,标准件从市场采购并组装得到。
实验过程为:将M 16螺栓旋入配套的螺母,并在螺栓尾端留有一定距离;旋入第二个螺母,并将其固定在台面上,用定力矩套筒扣在螺栓头部,使用扳手对定力矩套筒施加力矩将螺栓拧紧;螺栓拧紧后,螺栓尾端第一个螺母将第二个螺母锁紧,表示拧紧完成。零部件组装与实验图如图15所示。
实验结果如图16所示。一方面,螺栓尾端两螺母轻微接触后,定力矩套筒开始空转打滑,这意味着此机构具有定力矩效果,但卸荷力矩过小,难以满足要求。另一方面,实验结束后,对零件进行拆分检查,发现中轴凹槽处被压溃变形,形成凹坑,这是由于金属球与中轴凹槽侧棱的接触应力较大导致。由于塑料材质较软,变形处更为明显,发生变形的区域与有限元分析的结果一致,证明了有限元仿真的正确性。
利用ABAQUS软件的显式动力学分析,本文设计的定力矩套筒能够起到有效的定力矩作用,但卸荷力矩过小,仅3 N·m。根据仿真得出的应力数据,金属球在从凹槽脱离和金属球再次撞击凹槽两种情况下,凹槽侧棱应力均较大,会导致材料变形及损坏,实验结果也证实了這一点。经过进一步分析,表明此定力矩套筒能够在小力矩、低转速的条件下实现定力矩卸荷功能,且成本低、操作简单,无需调节正反转,安全可靠,能够满足日常螺栓拧紧的需求。
[参考文献]
[1] 沈家华,张洪玉,何曙光.电动扳手的发展与钢结构中高强度螺栓施拧技术的提高[J].电动工具,2015(S1):19-20.
[2] 杨武成,宋文学,罗庚合,等.扭矩扳手检定仪的研究现状与发展趋势[J].仪表技术,2013(8):48-49.
[3] 杨德勇.新型定扭矩气动扳手及其参数化CAD研究[D].镇江:江苏大学,2002.
[4] 欧阳俊.大型数显气动扭矩扳手的研制[D].成都:西华大学,2011.
[5] 张胜生.低扭矩数显扳手的研制[D].成都:西华大学,2012.
[6] 李晶.智能电动扳手控制系统设计[D].武汉:武汉科技大学,2012.
[7] 李金梁.基于无线传输的大扭矩数显扳手的研究[D].成都:西华大学,2013.
[8] 李叶青.便携式数控定扭矩扳手控制器的研究与开发[D].合肥:安徽大学,2018.
[9] 张振京.高强度螺栓电动定扭矩拧紧扳手测控系统设计[D].济南:山东大学,2018.
[10] 袁星星.基于ABAQUS显式分析下的船舶撞击桥梁上部结构研究[D].西安:长安大学,2019.
[11] 江丙云,孔祥宏,罗元元.CAE分析大系:ABAQUS工程实例详解[M].北京:人民邮电出版社,2014.
(责任编辑 白丽媛)
猜你喜欢
装备维修技术(2021年20期)2021-03-29
轻兵器(2020年5期)2020-06-22
中国房地产业·下旬(2019年8期)2019-09-25
中国建筑金属结构(2018年6期)2018-08-31
中国科技纵横(2018年14期)2018-08-30
中国建筑科学(2017年3期)2017-06-19
科技与创新(2017年10期)2017-06-07
轻兵器(2017年10期)2017-06-01
轻兵器(2017年10期)2017-06-01
幼儿教育·教育教学版(2016年5期)2016-09-30
