基于捷联导引头的制导信息解耦及滤波方法
2020-04-29 13:03王荔豪王妮芝
计算机测量与控制 2020年4期
王荔豪,杨 凯,马 菲,许 琛,王妮芝
(中国兵器工业第203研究所,西安 710065)
0 引言
一直以来,现代战场的发展以逐步体现为信息化的发展,并且战争形势已经由原先的大规模作战方式转化为小规模且机动性强的快速反应战场形势,同时,战场环境也变得愈发复杂。于是,精确打击是未来信息战场的重中之重。在当今世界,包括捷联寻的制导技术已经成为前沿导弹发展趋势,目前在许多国家,捷联制导寻的技术已经应用到自己武器生产装备中了,同时需要保证较高的精确度,这就需要对捷联制导寻的技术进行深入研究,达到满足要求的制导精度。
捷联导引头是将测量内部制导天线与导弹弹体刚性连接的一种导引头体制,对于现代化战术导弹而言,捷联导引头具有成本低、体积小等优点,可广泛应用于小型战场环境。但是,其在导弹飞行过程中只能测量得到导弹和目标的俯仰和偏航方向上的视线角信号,且该信号中耦合着弹体的姿态角信息,无法直接应用于导弹的比例导引环节。
文献[1]采用无迹施密特卡尔曼滤波方法对捷联导引头测量的制导信息进行处理,可以准确估计制导信息,并将其用于导弹的末段比例导引回路。但是这种方法对于弹体非线性模型的要求较高,且算法复杂度高,不利于工程化应用。
文献[2]通过分析数学平台的算法机理,通过引入导弹弹体姿态信息并通过直接微分的方式来解算视线角速度信息。当导弹在飞行过程中存在强烈外界干扰时,弹体姿态变化频繁,进而引起弹体角速率的剧烈跳动,直接微分会影响制导信息的品质,不能保证对目标的稳定跟踪。
本文提出了一种用于捷联导引头体制的制导信息解耦算法以及滤波方法,该方法是基于某项目的具体工程经验推导而出的,能够解决工程实际过程中捷联导引头体制下如何精确攻击目标的问题。文章随后结合具体的导弹六自由度模型,模拟导弹在实际飞行过程中剧烈的姿态变化情况以及各种条件下对该方法进行数字仿真分析验证,仿真结果可以明显看出,该文的研究成果为现代化战术导弹捷联导引头工程化应用提供了有价值的参考,能够用于捷联导引头制导体制下的导弹精确末制导。
1 坐标系定义
1.1 发射坐标系Axyz
定义导弹攻击过程中的坐标系关系如下,发射坐标系原点A为发射点在大地水平面的投影;Ax轴是发射点在大地水平面投影与目标点在大地水平面投影的连线,指向目标为正;Ay轴位于过A点的铅垂面内垂直于Ax轴,指向上为正;Az轴垂直于Ax、Ay并构成右手坐标系[3]。
1.2 弹体坐标系Ox1y1z1
弹体坐标系的原点O取在导弹的质心;Ox1轴与弹体纵轴重合,指向导弹头部为正;Oy1轴位于弹体纵向对称平面内与Ox1轴垂直,指向上为正;Oz1轴垂直于Ox1y1平面,方向按右手直角坐标系确定。
1.3 视线坐标系Ox2y2z2
Ox2沿着导引头光学中心与目标质心的连线,指向目标方向;Oy2在包含Ox2轴的惯性铅锤平面内,指向上方;Oz2轴垂直于Ox2y2平面,方向按右手直角坐标系确定。
1.4 体视坐标系Ox3y3z3
Ox3与视线坐标系的Ox2重合,Oy3位于垂直于弹体Ox1z1平面上,垂直于Ox2向上,Oz2轴垂直于Ox2和Oy2轴并构成右手坐标系。
1.5 各坐标系之间的关系
基于对上述各坐标系的详细描述,各个坐标系之间均通过某些参数变量存在一定的关系,现将其之间的连接结构通过示意图展示如图1所示。

图1 各坐标系之间的关系示意图
2 惯性系下视线角解耦
捷联导引头制导体制具有其独特的特点,由于安装结构的特殊性,在导弹飞行过程中,当导引头准确捕获到目标后,其测量并输出的是目标相对于弹体的体视线角,而在导弹制导过程中,弹体相对于惯性空间是运动的[4]。
因此,捷联导引头测量得到的体视线角中包含了目标相对惯性空间的视线角和弹体运动两部分信息,当需要采用这些测量信息对目标进行准确打击时,制导系统要实现制导律则必须将导引头测量信号中耦合的弹体运动信息去除。根据上述坐标系间的旋转关系推导三维空间内的制导信息解耦算法。现将捷联导引头输出的具体制导信息参数分析如下。
2.1 体视线角
为了更好地表述该解耦方法,首先根据导弹六自由度模型对捷联导引头输出信号进行模拟。假设导弹当前的姿态角为[ϑ,ψ,γ],惯性系下弹目相对位置关系为[Xtm,Ytm,Ztm],可以得出弹体系下弹目相对位置关系为[Xtm1,Ytm1,Ztm1]。
[Xtm1,Ytm1,Ztm1]=L(ϑ,ψ,γ)×[Xtm,Ytm,Ztm]
(1)
其中,转换矩阵表示为如下公式:
L(ϑ,ψ,γ)=
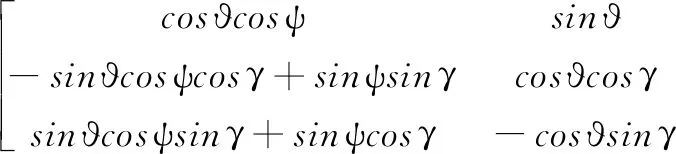

(2)
模拟导弹和目标之间的体视线角如下:
(3)
qα为体视线高低角;qβ为体视线方位角。
2.2 惯性系下的视线角解耦方法
现为了推导该文研究的视线角解耦方法,采取如下的处理方法,假设目标在视线
(4)
(5)

(6)
其中:转换矩阵L-1(ϑ,ψ,γ)为L(ϑ,ψ,γ)的逆矩阵。
将公式(4)和(5)代入公式(6)可得,惯性系下的视线高低角qv和qh结果如下:
(7)
3 制导信息滤波算法
综合考虑,由于本文设计的捷联导引头体制是一种可变化的非线性系统,在经过转矩电机的信号放大后、延时和死区系统后,其计算输出的制导信号会或大或小发生失真现象。所以,在导弹飞行的末段,需要对导引头输出的信息进行滤波以及限幅处理,以满足闭环回路的稳定性以及对于制导精度的条件要求,进而输出用于导弹末段比例制导的电压信号,该信号与实际的视线角速度信息成一定比例;随后该电压信号传送给导弹的舵机系统,舵机偏转一定的角度在大气中产生空气动力,进而操纵导弹改变现有的姿态状态,以达到满足攻击目标的弹道要求[5]。
在经过经验以及试验数据可以分析出,捷联导引头在导弹飞行过程中输出的制导信息中会混入高频噪声,对真实信号造成干扰。假如不对该信号进行一定的滤波处理,将会导引导弹无法准确攻击目标,对于末段制导产生影响,降低制导精度。因此,在导弹末段导引回路设计时引入制导滤波器,用来抑制高频干扰噪声,为舵机系统创造良好的工作环境,提高制导精度。
本文上节通过弹体姿态角等弹上测量装置输出的参数信息对捷联导引头输出的视线角信号进行了解耦处理,得到惯性系下的视线角信息,如果直接对该信号进行微分处理,一方面会将视线角信息的周期性震荡引入到视线角速度制导信息中,另一方面会放大测量噪声[6]。本文将采用α-β滤波算法从惯性系下的视线角信息中滤波提取视线角速度信息。
α-β滤波器是一种二阶跟踪滤波器,其作用与一维的卡尔曼滤波器基本类似,其基本结构与卡尔曼滤波器相似[7]。此滤波器可以对所有的信号进行平滑以及预测推导,获得其差分信息。通过前一个时刻的信息,进行微分处理并平滑,再综合上一个时刻的信息对下一时刻信号进行分析预测,作为下一时刻的预测值,以此类推。
(8)
2)选取滤波算法的时间间隔为Ts,将上述系统状态方程离散化为:

(9)

3)本文采用常值微分滤波器,公式如下:
(10)
其中:G=1-β,H=(1-β)2,β为记忆因子, 取值0—1。
4 数字仿真验证
结合某战术导弹六自由度模型[9],对本文提出的制导信息解耦及滤波算法进行验证。
4.1 仿真条件
通过对导弹飞行阶段的特性以及结合以往工程项目经验,惯性导航装置输出的导弹滚转角信息剧烈变化对于捷联导引头输出的制导信息耦合效果影响最大[10-11],因此,为了分析本文的研究方法对于捷联导引头输出制导信息的修正效果,特设置数字仿真条件如下:
设定导弹攻击目标距离为8 km,制导控制系统将导弹滚转姿态角全程控制在10°附近,同时在滚转姿态角上持续叠加幅值5°、频率0.5 Hz的正弦噪声信号,结合导弹模型模拟出捷联导引头输出的视线角信息,并进行解耦和滤波处理。
4.2 仿真结果
采用本文提出的解耦算法计算导弹惯性系下的视线角信息,并进行滤波处理,同时将结果引入六自由度制导回路形成攻击目标的闭环仿真模型,仿真结果如下:
1)在导弹飞行全程叠加正弦噪声信号,见图2。

图2 导弹滚转角示意图
2)体视系下的俯仰和方位视线角见图3。

图3 体视系下的视线角信号
从图3可以看出,由于导弹滚转角的不断变化,模拟出的捷联导引头输出信息也存在剧烈变化。
3)解耦出的惯性系下俯仰和方位视线角见图4。

图4 惯性系下的视线角信号
4)滤波前后俯仰和方位制导信息对比见图5。

图5 滤波前后制导信息对比示意图
5)导弹六自由度闭环弹道仿真结果如图6所示。
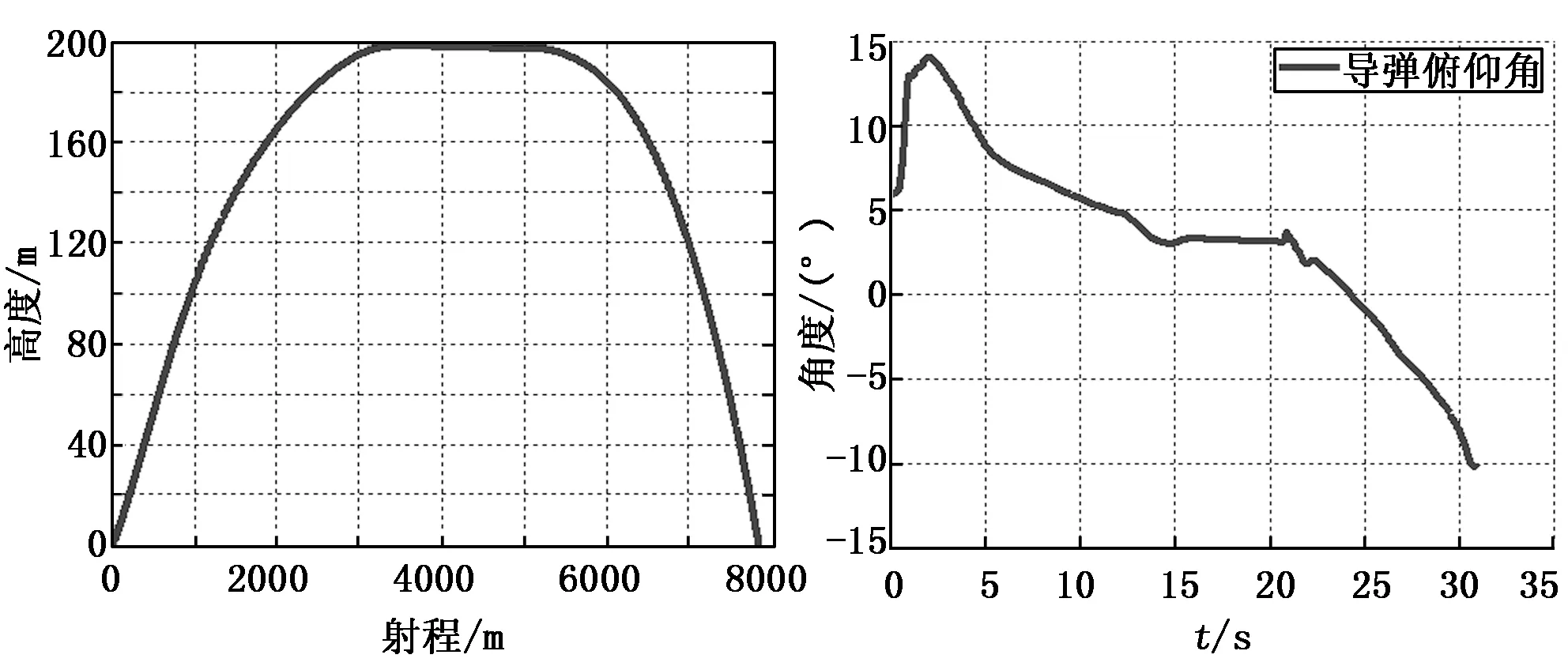
图6 导弹弹道和俯仰姿态角示意图
6)为了更好地验证本文提出的制导信息解耦和滤波算法对于工程化实际的应用效果,分别攻击3~8 km远近不同射程目标,将捷联导引头制导模式与理论数学比例导引模式下的目标攻击精度进行对比。
理论数学比例导引模式下的制导信息计算如下:
qv0(k)=HD×
qh0(k)=-HD×
(11)

导弹攻击不同射程目标的中靶精度统计结果见表1。

表1 不同射程不同模式下中靶精度统计
5 结论
本文提出了一种可应用于工程实际的捷联导引头制导信息解耦及滤波算法,解算出比例导引所需要的视线角速度制导信息。并基于某型战术导弹六自由度模型对该方法进行了数字仿真验证,并结合远近射程对比分析该方法与理论数学比例导引方法的制导精度进行了对比。仿真结果表明,使用该解耦和滤波算法对捷联导引头输出的视线角信息进行处理后,应用于导弹末制导比例导引段,导弹飞行状态良好,中靶精度满足末制导要求。本方法实现捷联导引头制导体制下的比例导引制导是可行的,且计算简便,可用于工程实际,能够实现对目标的精确打击。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
北京航空航天大学学报(2022年5期)2022-06-06
兵器装备工程学报(2022年4期)2022-05-09
爆炸与冲击(2022年2期)2022-03-17
北京航空航天大学学报(2021年4期)2021-11-24
兵工学报(2021年6期)2021-07-29
北京航空航天大学学报(2021年6期)2021-07-20
中国新技术新产品(2020年19期)2020-12-25
空天防御(2019年3期)2019-08-23
航空兵器(2018年1期)2018-04-09