基于阻抗模型的下肢康复机器人交互控制系统设计
2020-04-29 13:02黄玉平陶云飞贾龙飞郭亚星
计算机测量与控制 2020年4期
陈 靓,黄玉平,陶云飞,贾龙飞,郭亚星
(北京精密机电控制设备研究所,北京 100076)
0 引言
下肢康复机器人的安全性需求极高。因此,患者在康复训练过程中,需要考虑控制系统运动轨迹的位置,同时密切关注患者康复过程中的安全性与舒适程度[1]。随着机器人技术发展,社会对下肢康复机器人需求量增加,根据康复医学理论,在计算机控制的模拟控制系统支持下,帮助患者模拟正常人实际走路姿势进行康复训练,锻炼下肢,达到恢复肢体运动能力的目的。下肢康复机器人在训练过程中,根据患者患病情况及时调整运动速度,使患者达到康复最佳效果[2]。研究表明,坐姿和躺姿的下肢康复训练能够减少脑部受到损伤的患者身体重量与髋关节和腿部负荷,提高患者下肢康复效率。由美国斯坦福大学研制的THE ARM GUIDE末端患肢完成直线轨迹机器人,采用了比例微分位置控制方式,为关节提供自由运动能力;由日本安川电机公司研制了TEM LX2 typeD下肢康复机器人,使用被动训练方式进行主动柔顺,避免患者受到二次伤害;由中国科学院研究的坐/卧式下肢康复机器人“iLeg”,可以根据患者康复阶段的被动训练方式进行阻抗训练。上述这3种系统虽然充分考虑了下肢髋、膝两个关节对康复的影响,但柔顺能力较差,导致系统控制效果并不理想[3]。根据康复医学理论和阻抗模型,在一套完整的下肢康复机器人交互控制系统支持下,帮助患者模拟正常人走路规律进行康复训练,完成了可调节可拆卸交互控制系统的设计。
1 康复机器人交互控制系统总体方案
跟据上下两级控制,设计下肢康复机器人的交互控制系统,如图1所示。

图1 交互控制系统总体方案
系统中,PC主机负责系统管理、状态显示、实时监控等[4]。以步态运动为依据,确定控制系统所运行到的位置,该位置是唯一确定的,因此步态控制系统是一个位置闭环控制系统[5]。
下肢康复机器人交互控制系统能够对患者实施被动和主动两种控制模式,在被动控制模式中,机器人模仿正常人生活中一些动作,带动患者训练。主动控制模式中,机器人带动病情较轻的患者,对其下肢肌肉力量进行康复训练,进而实现下肢力量训练[6]。
2 系统整体结构
图2为所设计系统的整体结构。

图2 系统示意图
其中,硬件结构是由力传感器、反馈编码器、霍尔开关、A/D转换器、I/O接口、PC主机、驱动电路组成的。机器人在行走时,脚的运动轨迹形成一个椭圆,下肢康复机器人通过步态控制机构实现了椭圆轨迹,方便控制。驱动电路通过一定传动比带动步态控制机转动,控制机的末端与一个滚轴相连,而在该设备上安装一个脚踏板,患者踩在脚踏板上进行康复训练[7]。
2.1 L型二维力传感器
L型二维力传感器是一种将力信号转变为电信号形式输出的电子元件,该力传感器主要是由三个部分组成的,分别是弹性体、电阻应变片、电路。该型号力传感器具有尺寸小、高度低、耐腐蚀的优势,主要用于机器人运动空间小的力值检测领域[8]。采用全不锈钢材质,抗机械疲劳性较强,使用2mm机器人专用外径导线,信号稳定,抗干扰性较强。力传感器接线方式如图3所示。

图3 力传感器接线方式
图3所示为压向输出正信号,拉向输出负信号接线方式,如需拉向输出为正,需调换绿线和白线[9]。
DYHW-113型号微型力传感器可以通过机械臂上内嵌的力传感器获取,机器人需要恒力反馈确定其推动力是否够用,实现制造流程一致性。采用该传感器可确定零部件位置和高度,确定两个方向上的人机交互力,通过不断调整抓取高度就可实现目标精准定位[10]。
2.2 绝对值编码器
本文设计的下肢康复机器人依据下肢解剖学设计为单侧3个自由度,其髋关节屈/伸、膝关节屈/伸、踝关节屈/伸运动兼顾了对不同损伤程度的大关节到小关节的运动。为了实现对大腿长度、小腿长度、座椅宽度、座椅俯仰角度的调节,我们在机器人大小腿连杆内部、髋关节宽度调节滑台安装了共5个自由度的电动推杆。下肢康复的11自由度外骨骼机器人的机械结构如图1所示,各关节由无框电机驱动。每个关节安装了绝对编码器,增量编码器和转矩传感器,分别记录关节角度,角速度和转矩。编码器可将信号或数据进行编制与转换,并将角度转换为电信号形式。该编码器中心具备一个光电码盘,通过读取有光发射和接收器件读取,能够获取正弦波相位差[11]。带有混合式260.00的反馈步进编码器一般分为增量型与绝对型,所设计绝对型编码器的位置是由输出代码读数确定的,因此位置输出代码具有唯一性[12]。
2.3 驱动电路
通过驱动电路来控制电路信号,其电路设计如图4所示。

图4 驱动电路
将控制电路输出的脉冲宽度调制进行放大处理,使其足以驱动功率晶体管自动运作。以电路传来的信号为控制目标,转换到电力电子器件控制端处,使其开通或斩断信号,以此保证器件具有可靠导通效果[15]。
3 参考轨迹自适应柔顺控制
患者在康复过程中,容易出现痉挛等突发情况,下肢发生肌肉收缩,这与机器人的机械腿产生对抗,因此,需要机械腿体现出一定柔顺性,确保患者康复过程更加舒适和自然。
3.1 阻抗控制模型
阻抗控制可以为下肢康复机器人与周围环境之间的动态影响设定一个动态目标模型,确定目标信号。使用二阶微分方程表示下肢康复机器人目标阻抗模型,如式(1)所示:
(1)
下肢康复机器人的训练过程可以忽略加速度和向心力因素影响,构建系统控制模型如图5所示。

图5 系统控制模型框图
下肢康复机器人需要在整个训练过程保持平稳运行,因此在系统控制过程中,添加PID控制器,具有消除力误差功能,对位置、速度都具有一定调节作用。
3.2 参考运动轨迹设计
患者被动康复过程中理想的末端运动轨迹可以设定为一个有关时间的参数式方程,对时间进行等间隔取样,获取相同时间间隔的末端位置序列,利用逆向运动学获取有关关节空间的位置序列。该序列是由一阶可导的光滑曲线离散化得到的,并且具有唯一属性,为了保证序列元素唯一性,需在循环康复训练过程中,选取的时间段被设定为一个运动周期,从该周期内获取指定任务路径以及系统实时位置。
基于阻抗控制模型下的患者康复训练包括3个状态,分别是跟踪、主动柔顺和接近:
1)跟踪:当患者没有出现痉挛突发情况时,下肢没有产生肌肉收缩情况,此时当前位置与给定轨迹之间距离是小于设定阈值的,系统向远离设定轨迹运动。
2)主动柔顺:当患者出现痉挛突发情况时,下肢产生肌肉收缩情况,此时下肢康复机器人交互控制系统将会沿着肌肉收缩力矩方向偏离理想轨迹,实现主动柔顺。
3)接近:当患者出现痉挛突发情况时,下肢产生肌肉收缩情况,此时当前位置与给定轨迹之间距离是大于设定阈值的,系统向靠近设定轨迹运动。
上述3个状态充分体现了空间和时间上的主动柔顺性,下肢康复机器人交互控制系统中参考运动轨迹流程设计如图6所示。
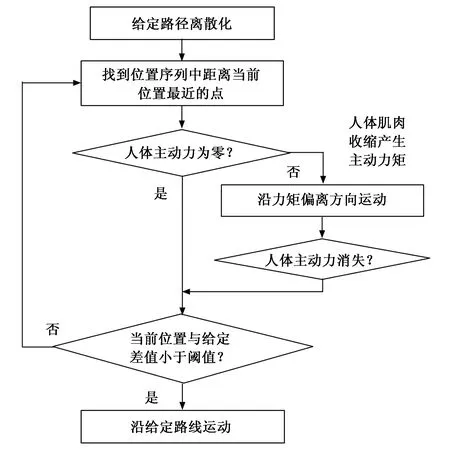
图6 参考运动轨迹流程设计
当患者下肢与下肢康复机器人机械腿发生对抗时,系统会停止运动,有效缓解两者之间对抗,充分体现了主动柔顺性。在下肢力矩消失后,该轨迹与初始轨迹不会出现时间偏置,保证了患者康复过程的舒适和安全。
4 柔顺训练实验研究
对于基于阻抗模型的下肢康复机器人交互控制系统进行柔顺训练实验时,需先将实验者放置在机器人上部,在控制系统下机器人将带动实验者下肢按照规划好的轨迹进行运动。
4.1 实验过程
当实验者的下肢对机器人的力小于设定的阈值时,则力传感器信号为0,此时下肢康复机器人轨迹不会发生改变;当实验者的下肢对机器人的力大于设定的阈值时,则力传感器信号不为0,此时下肢康复机器人闭合力环,这样当机器人运动轨迹偏离预定轨迹时,实验者不再用力,机器人将会回归控制系统所设定轨迹,由此实现柔顺运动控制。下肢康复机器人控制系统如图7所示。

图7 实验者下肢康复训练中
4.2 力矩检测及分析
基于阻抗模型的下肢康复机器人交互控制系统下康复训练实验结果如图8所示。

图8 膝关节运动轨迹
从图8可看出,下肢康复机器人交互控制系统在患者康复训练过程中表现出了良好运动轨迹跟踪性能。为了分析患者突发情况下的记录,实现柔顺康复轨迹,需先标定力矩传感器,并给出空载情况下力矩值和负载情况下带人进行被动康复,人体不施加力矩值,如图9所示。

图9 脚底二维力矩传感器值
由图9可知:负载情况下,力矩传感器最大力矩为44 Nm,最小力矩为-29.5 Nm;而负载情况下,力矩传感器最大力矩为-3 Nm,最小力矩为-22 Nm。
外骨骼在负载下合力矩与膝关节角度如图10所示。

图10 负载下合力矩与膝关节角度
由图10可知,在负载下的膝关节角度变化具有一定规律性,最大角度为94°,最小角度为61°;负载情况下的合力矩变化规律性不强,最大合力矩为93 Nm,最小合力矩为63 Nm。
4.3 实验结果与分析
患者康复初期,经常会出现肌肉痉挛现象,当患者出现异常情况时,康复效果并不理想,需要实时记录传感器获取的数据。在该数据支持下,将基于THE ARM GUIDE末端患肢直线轨迹机器人、TEM LX2 typeD下肢康复机器人以及坐/卧式下肢康复机器人与基于阻抗模型机器人的外骨骼在负载下的合力矩与膝关节角度控制情况进行对比分析,结果如表1所示。
由表1可知:基于阻抗模型机器人与实际患者所需的康复轨迹一致,合力矩与膝关节角度大小基本相同,而其余3种机器人缺少阻抗控制,导致合力矩与膝关节角度与实际情况不一致。
为了进一步说明基于阻抗模型机器人柔顺性好,需观察患者单腿在竖直方向上的柔顺性表现,如图11所示。
通过图11可看出,基于阻抗模型机器人交互控制系统能够在实现足底与地平面稳定接触情况下,大大减小地面对机器人腿部接触的冲击力,保证系统快速稳定运行,由此也证实了基于阻抗模型的下肢康复机器人交互控制系统设计的合理性。

表1 四种机器人合力矩与膝关节角度对比分析

图11 单腿接触力变化曲线
5 结束语
构建基于阻抗模型控制方法设计了下肢康复机器人交互控制系统,并通过实验验证分析。采用阻抗模型控制方法实现了下肢有限主动柔顺性,加强了下肢康复机器人对下肢主动柔顺性,由实验结果可知,与传统阻抗控制方法案相比,设计的交互控制系统具有更好主动柔顺性,为患者提供更好的保护,使患者在康复训练过程中存在一种舒适感觉。
总之,基于阻抗模型的下肢康复机器人交互控制系统设计更加人性化,有利于患者康复,帮助患者恢复下肢运动机能。为了进一步优化该系统,采用AVR单片机,降低成本,使下肢康复机器人交互控制系统设计更加产品化。对下肢康复机器人配以合适生物信息检测功能,通过生物反馈信息来提高患者康复效果。分析PC端收集起来的生物信息,能够记录康复训练效果,进而选择有效训练方案,使系统变得更加智能化。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
中国典型病例大全(2022年11期)2022-05-13
现代仪器与医疗(2022年1期)2022-04-19
中国听力语言康复科学杂志(2021年6期)2021-12-21
新视线·建筑与电力(2021年2期)2021-09-10
现代仪器与医疗(2021年1期)2021-06-09
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
直升机技术(2020年2期)2020-06-16
山东青年(2016年12期)2017-03-02