基于龙伯格观测器的变频一体机谐波电流抑制控制
2020-04-28 02:57:52张利军崔晓光
微特电机 2020年4期
张利军,崔晓光,胡 冰,李 刚
(中车青岛四方车辆研究所有限公司,青岛 266031)
0 引 言
变频一体机[1]将变频器与电动机一体化结合,可大大提升工作效率和降低生产成本,减少变频器与电机之间电缆的投入,同时可实现节能20%以上,在煤矿开采等领域具有巨大的市场价值。
在变频一体机用感应电机的无速度传感器矢量控制[2]中,磁链和转速的观测至关重要。基于电压模型[3]的开环观测方法具有简单、参数依懒性小、高速性能好的优点,但易受到积分饱和、直流偏置以及随机干扰和测量噪声等因素的影响。模型参数自适应观测方法[4]引入转速估算的闭环反馈环节,提高了系统鲁棒性。其中滑模观测器[5-6]在保持滑模结构优势的同时有效地消除了系统抖动;扩展卡尔曼滤波器方法[7-8]中噪声矩阵的准确设计较复杂,增加了实时控制的微处理器运算负担;龙伯格观测器[9-11]提高了系统对参数变化的鲁棒性,但需要保证转速估算的收敛速度和系统稳定性。
针对前级不控整流、后级变频输出的主电路拓扑结构,电机端负载增加导致母线电压周期波动,使电机端电流存在周期性谐波。针对电机端电流谐波问题,常用的波形控制技术有重复控制[12]和谐振控制[13]。重复控制能有效抑制各周期性的扰动,但是系统动态性能较差;谐振控制可以实现对特定频率谐波的无静差控制,但需要合理设置参数。
本文在龙伯格观测器基础上,设计改进的反馈增益矩阵,保证转子磁链观测和转速估算收敛速度的同时,保证低频区电机转速估算的稳定性;针对大负载工况,中间母线电压波动引起的电机端电流谐振问题,设计自适应谐振控制器,通过电机端电流中谐波幅值实时调整谐振调节器补偿量,实现了电机端电流中特定频率谐波的无静差控制及良好的动态性能。最后通过Simulink仿真和电机对拖实验,验证了本文控制策略的有效性。
1 模型建立
变频一体机基本工作原理是三相交流输入电压进行不控整流,再经过逆变电路输出三相电压,为电机供电,中间母线电压采用电容稳压,因此属于电压源型电路,主电路结构如图1所示。
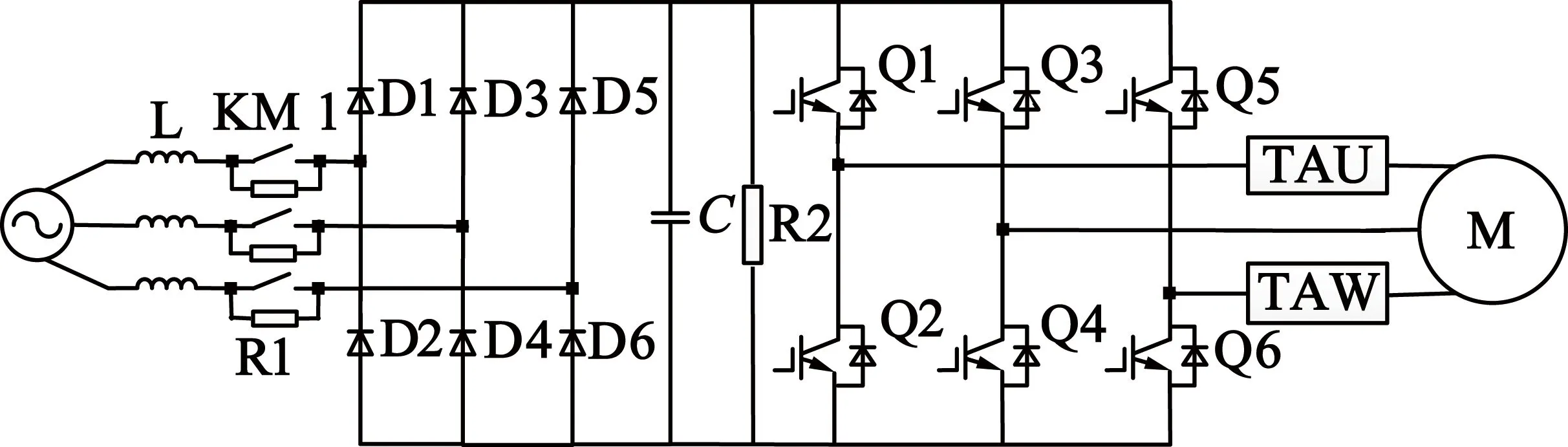
图1 变频一体机主电路原理图
变频一体机主电路主要包含三相不控整流模块、三相逆变模块和感应电机,实现交-直-交变频功能来控制感应电机运行。
考虑感应电机本身的耦合非线性特点,按照必要的理想化假设条件,建立数学模型。在两相α,β静止坐标轴系下,转子绕组相对于定子绕组是以角频率ωr旋转的,通过Clarke变换获取感应电机在两相α,β静止坐标轴系下的数学模型。
电压方程:
(1)
磁链方程:
(2)
式中:usα,usβ和urα,urβ分别为定子和转子电压α,β轴分量;isα,isβ和irα,irβ分别为定子和转子电流α,β轴分量;ψsα,ψsβ和ψrα,ψrβ分别为定子和转子磁链α,β轴分量;ωr为转子角频率;Rs和Rr为定子和转子电阻;Ls和Lr为定子和转子电感;Lm为定转子互感;p为微分算子。
感应电机模型中,转子电流不易检测,定子磁链对于转子磁场定向的控制策略而言意义不大,因此选取定子电流和转子磁链为状态变量,把式(1)、式(2)中转子电流和定子磁链变量消除,建立变频一体机用感应电机状态空间数学模型:
(3)
2 改进的龙伯格观测器设计
在龙伯格观测器经典增益矩阵基础上,设计改进的反馈增益矩阵,保证磁链观测和转速估算的收敛速度,同时兼具低频段电机转速估算的稳定性;并通过双线性离散化方式进行基于微处理器的实现,具有高离散化精度和误差小的优点。
2.1 改进反馈增益矩阵设计
根据两相α,β静止坐标系下的数学模型,定子电流和转子磁链的初始状态可以通过有限时间内的定子电流变化来确定,因此定义如下观测模型:

(4)

引入反馈增益矩阵,以使状态观测误差收敛至零,获取状态观测器:
(5)
其中反馈增益矩阵Ke=[ke_ike_ψ]T为复数矩阵,经典反馈增益矩阵通常按照和电机自身极点成比例配置,得到经典反馈增益矩阵Ke1如下:
(6)
反馈增益矩阵的极点通常配置在电机自身极点的左侧,并且越远离电机自身极点,观测器收敛速度越快。而为了保证低频段的观测稳定性,又需要k值较小,这导致观测器极点靠近电机自身极点进而影响收敛速度。为了达到保证系统稳定性和观测器收敛速度快的目的,设计改进的反馈增益矩阵Ke2。
(7)
根据感应电机龙伯格观测器数学模型进行观测器极点分析,其中观测器Ⅰ采用经典的反馈增益矩阵,观测器Ⅱ采用改进的反馈增益矩阵,k=1.2,得到电机本身和两种观测器的极点分布,如图2所示。
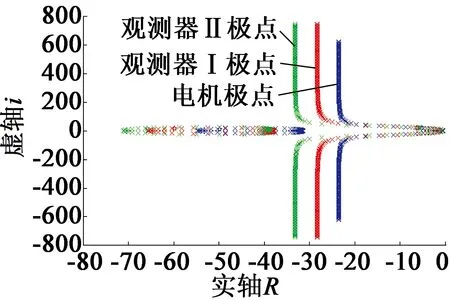
图2 电机及观测器极点分布图
采用PI形式进行转速估算,得到转速表达式:
(8)
2.2 观测器离散化方法


k1disα(k-1)-k1qisβ(k-1)]


2k1qisα(k-1)+2k1disβ(k-1)]


isα(i)-(u3k2q+u4k2d)isβ(i)]}


设置反馈增益矩阵中k值随转速实时变化,低频段,保证系统稳定性的前提下,选取较大的k值,以加快转速估算收敛速度,高频段,选取k值较小,保证系统的稳定性。
3 自适应谐振控制器设计
针对变频一体机硬件电路拓扑,当电机端负载逐渐增加时,中间母线电压会存在300 Hz的谐振,谐振电压会导致电机端电流畸变,影响控制效果,严重情况会导致电机失控。针对电机端输出电流存在300 Hz谐波问题,考虑增加谐振控制环节,针对特定的谐振频率,设计自适应谐振控制器。
谐振调节器传递函数:
式中:x=6;Kr为增益系数;ωc为带宽;ωs为基波角频率。对谐振调节器进行Bode分析,获取其频域特性,如图3所示。

图3 谐振调节器Bode图(Kr=5,ωc=10π rad/s)
针对变频一体机用感应电机,考虑励磁电流分量isM中含有的300 Hz谐波较小,因此控制目标选取转矩电流分量isT中含有的300 Hz谐波为零。首先通过带通滤波器(BPF)提取转矩电流分量isT中300 Hz谐波电流,然后通过PI调节获得增益系数K值。M,T轴电流环偏差经过谐振调节器产生补偿输出,乘以增益系数K获得最终的谐振控制器补偿值。设计的自适应谐振控制器如图4所示。

图4 自适应谐振补偿控制器
得到谐振调节器补偿值:
(9)
进而得到优化后的感应电机无速度传感器矢量控制策略,如图5所示。
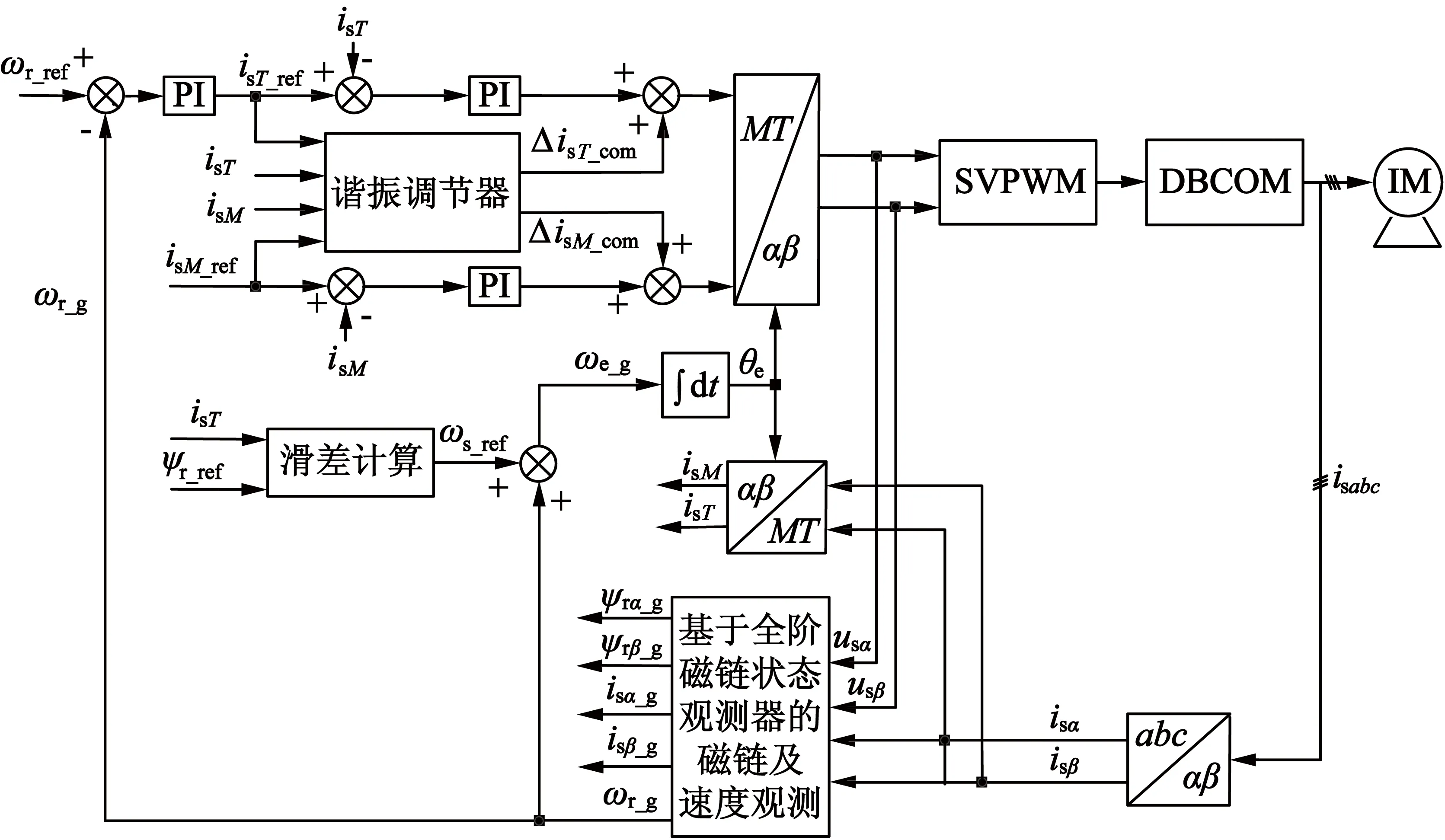
图5 改进矢量控制框图
4 仿真和实验验证
4.1 仿真结果与分析
为了验证本文控制策略的有效性和优越性,利用变频一体机中感应电机参数,在MATLAB/Simulink上搭建基于龙伯格观测器的矢量控制模型,进行仿真验证,仿真所用主要参数如表1所示。

表1 仿真和实验所用电机参数
设置目标转速为1 500 r/min,3.3 s时突加50%额定转矩,4.5 s时突加转矩至100%额定转矩,5.5 s时突加转矩至150%额定转矩,图6(a)是估算转速、实际转速以及目标转速曲线,图6(b)是估算转速和实际转速之间的偏差,可见转速观测效果良好。

(a) 估算转速、目标转速、
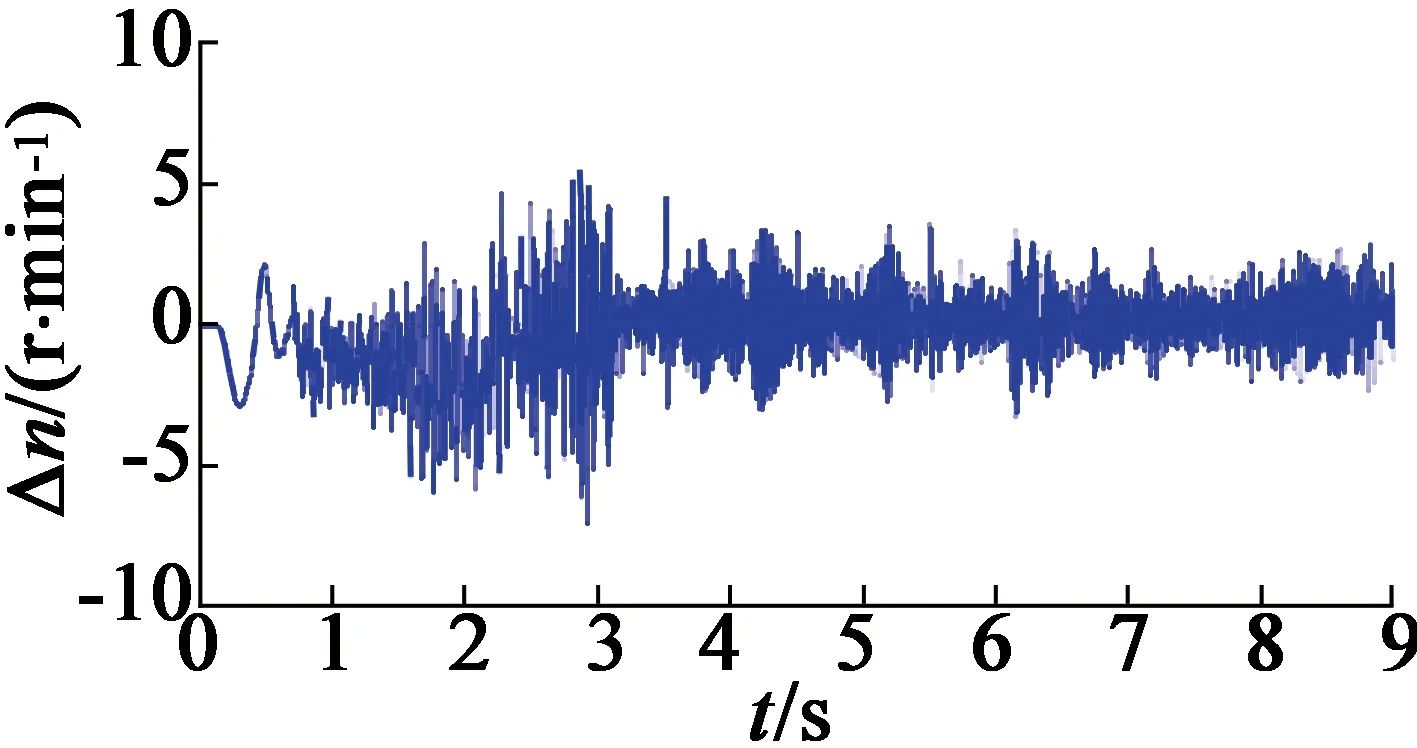
(b) 估算转速偏差
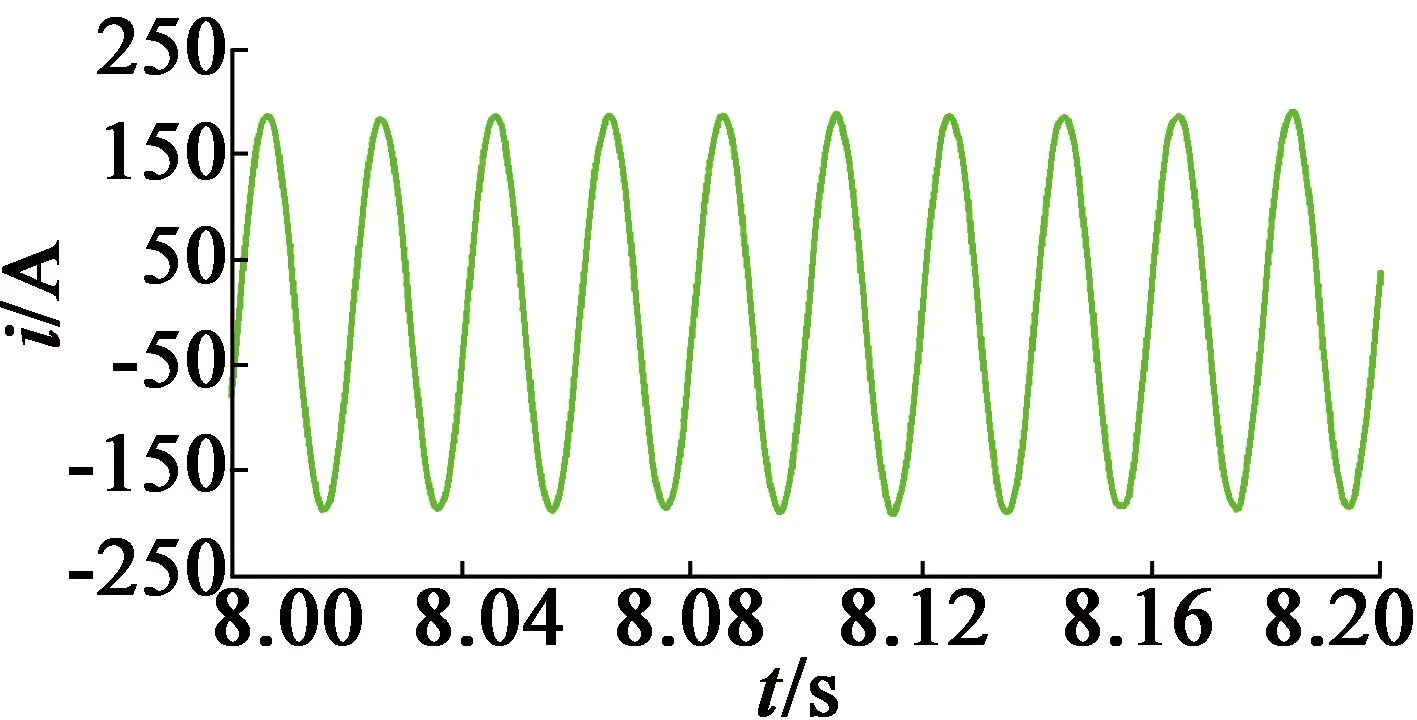
负载增至150%额定转矩,待系统稳定后,记录增加谐振控制器前后的母线电压、电机电流、电机电流谐波,图7为优化前控制效果,图8为增加谐振控制器后控制效果。对比图7、图8,优化前,母线电压和电机端电流均含有300 Hz谐波,电机端电流存在畸变;增加自适应谐振控制器后,母线电压周期波动仍然存在,电机端电流中谐波电流明显减小,电机端电流不再畸变,控制效果较好。

(a) 电机端电流

(b) 母线电压及d,q轴谐波电流
(a) 电机端电流
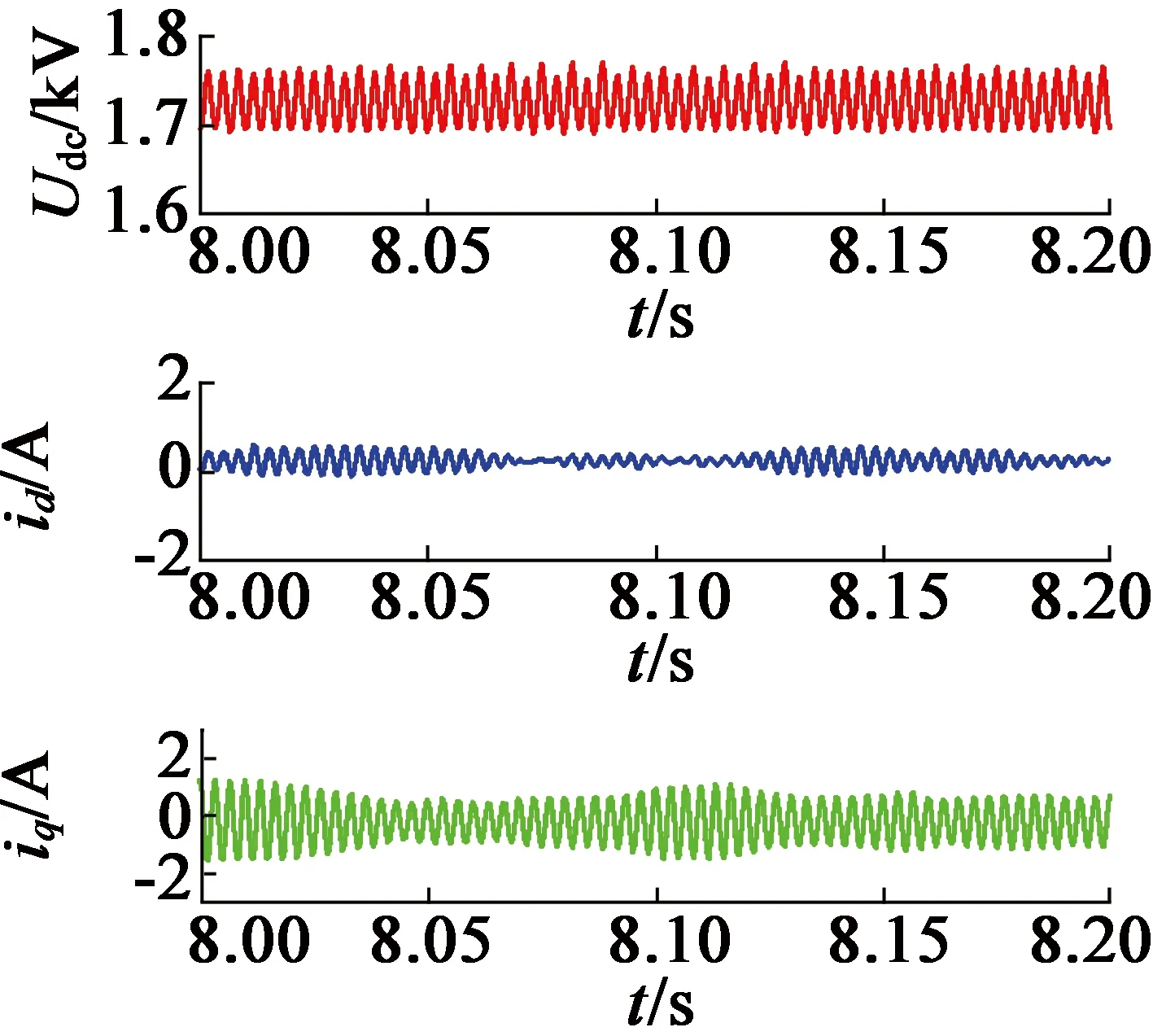
(b) 母线电压及d,q轴谐波电流
4.2 实验结果与分析
通过对拖实验平台对本文的改进控制策略进行验证,选取TMS320F28335 DSP来实现算法。图9为突加负载转矩后电机端电流和母线电压波形,图10为增加自适应谐振控制器后额定转速、额定转矩稳态运行时波形,可见优化前电流发生畸变,优化后控制效果变好明显。
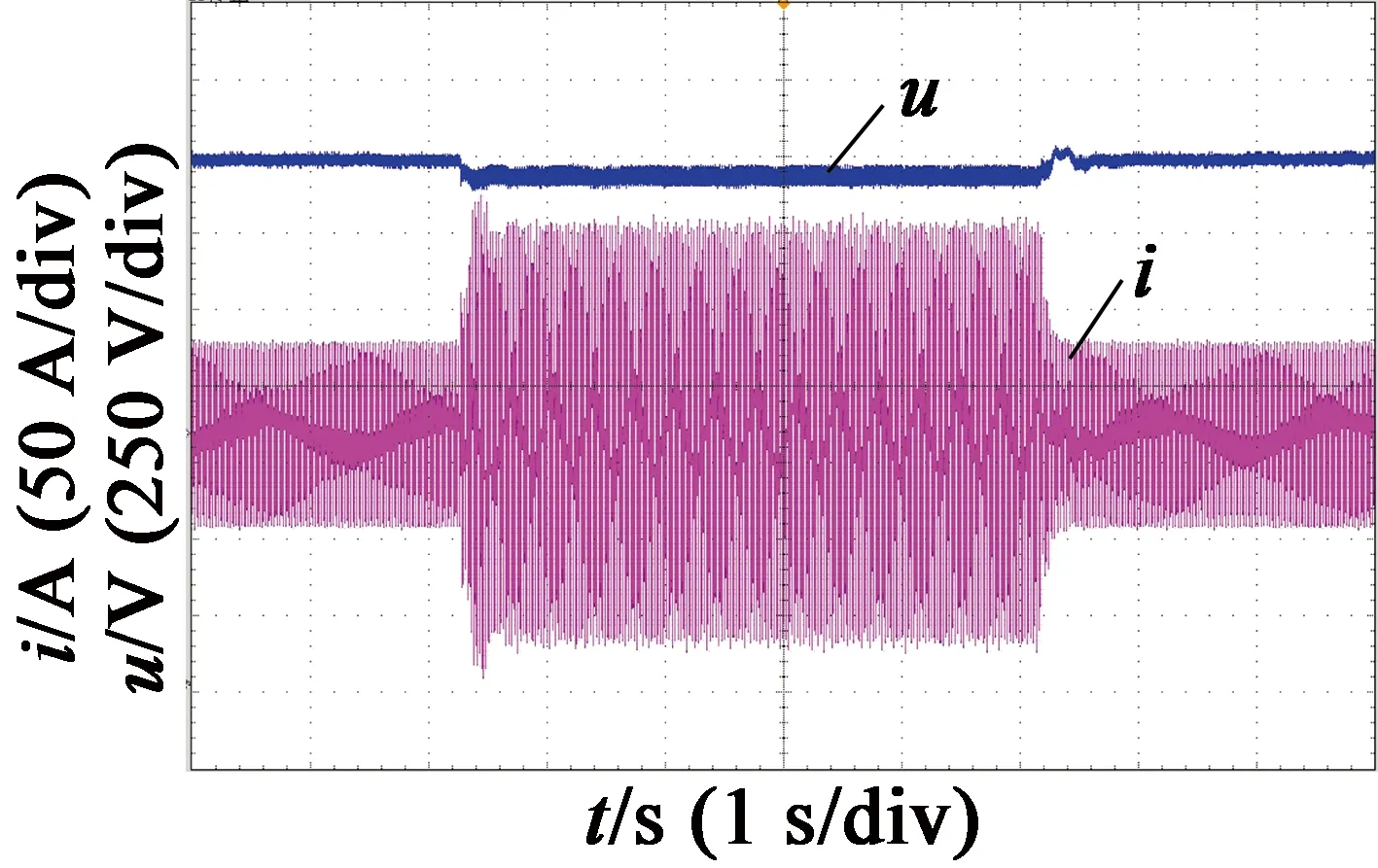
图9 谐振优化前,突加负载后的电机端电流和母线电压

图10 增加自适应谐振控制后的稳态实验波形
5 结 语
本文在龙伯格观测器基础上,设计了改进的反馈增益矩阵,保证转子磁链观测和转速估算收敛速度的同时,又兼具低频区电机转速估算的稳定性。针对大负载工况,中间母线电压波动引起的电机端电流谐振问题,设计自适应谐振控制器,通过电机端电流中谐波幅值实时调整谐振调节器补偿量,实现了电机端电流中特定频率谐波的无静差控制,仿真和电机对拖实验验证了本文控制策略的有效性。
猜你喜欢
电测与仪表(2016年10期)2016-04-12 00:26:38
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2015年5期)2015-04-09 11:30:46
电测与仪表(2014年23期)2014-04-04 12:08:30
电测与仪表(2014年11期)2014-04-04 09:21:36
电测与仪表(2014年11期)2014-04-04 09:21:36