
基于改进离散粒子群算法的生鲜农产品配送路径设计
2020-04-26 11:08孙宗军马佳玉徐海鑫SUNZongjunMAJiayuXUHaixin
物流科技 2020年3期
孙宗军,马佳玉,徐海鑫 SUN Zongjun,MA Jiayu,XU Haixin
(山东科技大学 交通学院,山东 青岛 266590)
(Transportation College,Shandong University of Science and Technology,Qingdao 266590,China)
0 引言
运输成本的控制一直是物流行业的热点问题之一,因生鲜农产品的配送对时效性、准确性要求较高,生鲜农产品的高运输成本成为制约生鲜农产品物流体系发展的难点,优化配送路径是提高配送效率、降低运输成本的重要方法[1]。目前,生鲜农产品的配送路径优化常采用传统的路径优化方式[2],即运输车依次经过需要配送的n个站点再回到始发点,求解最短路径。然而,传统的路径优化往往无法得到真实的最短路径,增加了运输成本。本文通过改进的粒子群算法[3],以RH农场为例,对其生鲜农产的配送进行了路径优化,降低配送成本。
1 RH农场的基本概况及现状分析
RH农场的主要生鲜农产品包括水果类、蔬菜类、肉类、花类等。对市区范围内的18个配送点进行了地理数据采集,RH为农场,A、B为现有的两家门店,C为虚拟配送中心,如图1和图2所示。
2 改进粒子群算法
粒子群算法采用实数编码是其显著优点,不需要采用二进制编码来进行最优解的运算。在设置好适应度函数后就可进行搜索最优解,直到满足中止条件后终止运算。
2.1 TSP离散型粒子群算法
程毕芸[4]提出了搜索混沌离散粒子群优化算法,优化后的粒子群算法参数如式(1)和式(2)所示。
粒子的更新后速度:

粒子的更新后位置:
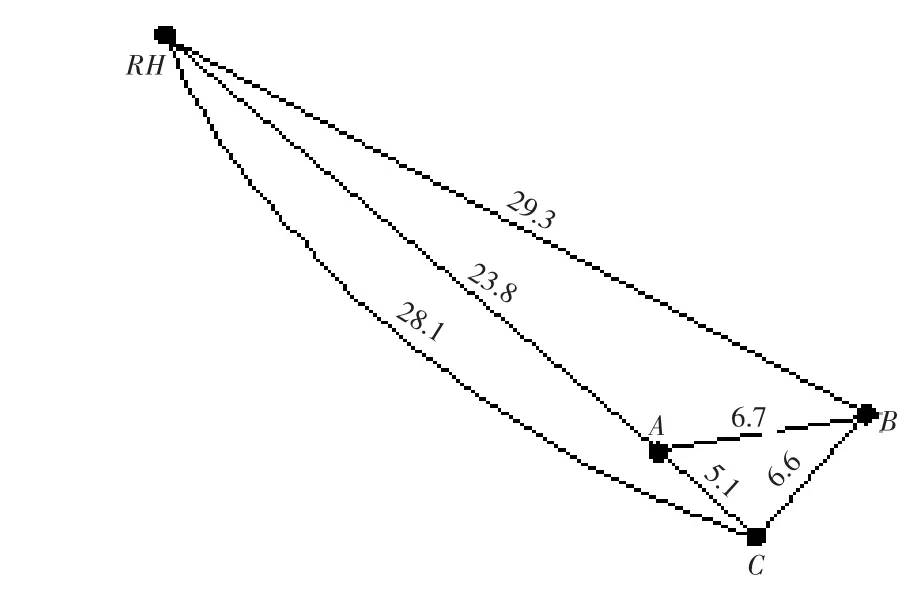
图1 RH与各配送中心相对位置示意图

图2 RH与各配送点相对位置示意图

当配送点的个数小于等于30时,迭代次数达到60左右即可达到最优。本文中配送点个数有18个,设置迭代次数设为60,粒子数为200。
2.2 2SGPSO算法改进
2SGPSO算法在解决物流运输路径问题时,首先利用GPSO算法对配送站点序列进行搜索寻优操作,得到最优配送站点序列和最短距离。然后利用2SA算法对GPSO算法得到的最优配送站点序列进行操作,最终得到的最优配送站点序列和最短路径距离。操作流程如下所示[4]。
输入:粒子群个数、配送点个数、配送点坐标
(1)初始化粒子速度及位置。
(3)根据公式更新粒子位置速度。
输出:Gbest
2.3 ACPSO算法改进
ACPSO中设n个需要经过的点,任选其中第j1次和第j2次经过的点,在路径C0中将第j1次和第j2次经过的点进行交换,其余点顺序不变,变化后的路径定义为C1;n个点,任意选取一个交叉区域,将old2的交叉区域添加至old1中随机选取的位置,且将old1在old2交叉区中已经过的点删除。操作流程如下[5]:
输入:粒子群、配送点个数、配送点坐标、最大迭代次数、随机产生对个数的初始解C0
(1)初始化粒子速度及位置。
(3)根据公式进行更新位置:
若:第j个粒子的路径C0(j)与个体最优交叉得到C1(j),C1(j)同Gbest交叉到C2(j),C2(j)经过变异操作变为下一次迭代的初始解其中,d( I,j )<Pbest(j),则进行上述交叉操作,否则进行自身变异;
(4)得到当前迭代次数下的适应值。
输出:Gbest及路径
3 最短路径优化
3.1 常规路径优化
根据描绘的实际位置分别做出A、B、C三个配送点到需求点的赋权(无向)图,如图3所示。

图3 以A、B、C为配送点到各需求点的赋权图
运用Lingo11软件求解以A、B、C点为配送中心的最短配送距离:以A点为中心1.5km范围内的最短配送距离为8.64km,配送路径为A→a5→a4→a3→a1→a2;以B点为中心3km范围内的最短配送距离为18.3km,配送路径为B→b2→b1→b4→b5→b3;以C点为中心2.2km范围内的最短配送距离为11.77km,配送路径为C→c4→c3→c1→c2。
由农场到全部需求配送点的最短距离为91.91km,配送路径为RH→a1→a2→A→a4→a3→b4→b5→B→b3→b2→b1→C→c2→c1→c3→c4→a5→RH。
3.2 基于改进离散粒子群的路径优化
3.2.1 以A、B、C为配送中心的路径优化
将各配送点的相对坐标导入,通过MATLAB2016得到ACPSO改进粒子群算法与2SGPSO改进粒子群算法的收敛曲线如图4、图5所示。
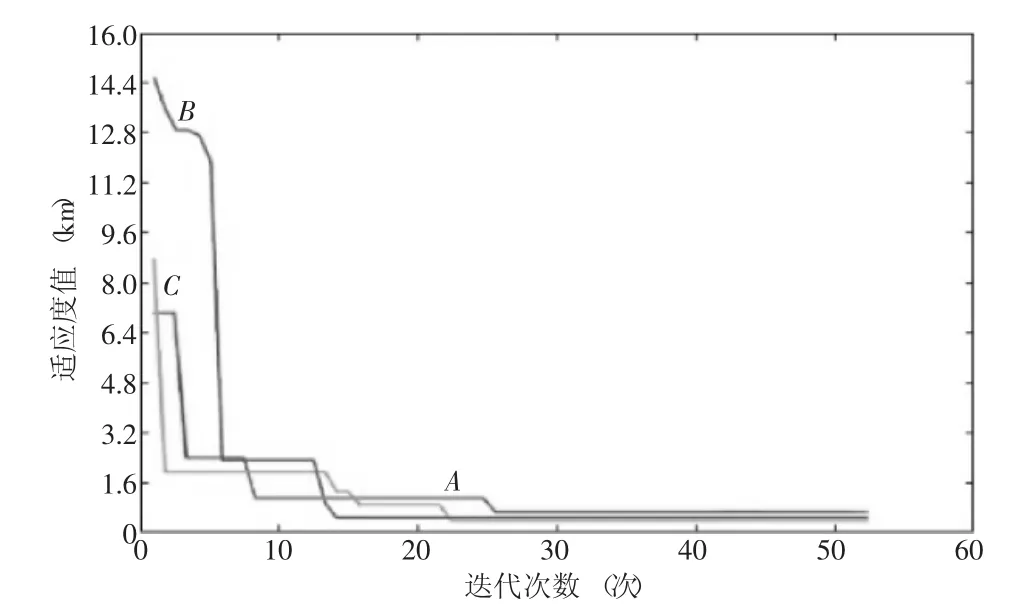
图4 ACPSO算法的收敛曲线

图5 2SGPSO算法的收敛曲线
表1、表2统计了两种算法的运行结果,可以发现:ACPSO改进粒子群算法软件运行结果显示收敛效果较好,较快。迭代30次以后,即趋于稳定;2SGPSO改进粒子群算法软件运行结果显示收敛速度较慢,容易形成局部最优。

表2 2SGPSO算法运行结果
综合两种改进粒子群算法以及常规路径优化结果,ACPSO算法求得的以A、B、C三个配送点为起点配送路径长度最优:A→a2→a1→a3→a4→a5,最短路径为 6.74km;B→b2→b1→b4→b5→b3,最短路径为 14.6km;C→c1→c2→c3→c4,最短路径为8.74km,如图6所示。2SGPSO改进算法中获取最优目标函数过程波动较小,收敛运算速度快,针对优化对象数量较小的模型,效果一般。

图6 ACPSO算法优化的以A、B、C为配送点的最优路径图
3.2.2 以农场为配送中心的路径优化
将全部配送点坐标代入两种改进算法中,再次求解取消配送点的情况下,由农场直接配送到各个需求点的全局路径,结果如表3所示。

表3 全局路径的运行结果

图7 两种算法求解全局路径的收敛曲线图
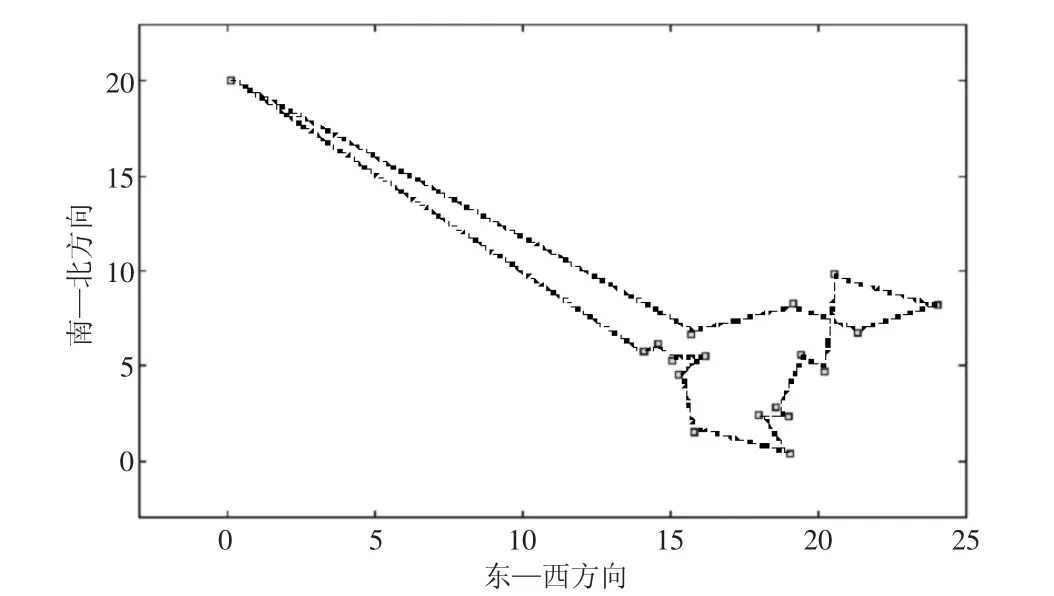
图8 2SGPSO算法的全最优路径
如图7,从全路径优化来看,2SGPSO求解全部路径收敛速度快,收敛效果好,在迭代40~50前后趋于稳定。2SGPSO算法求解的最优路径的路径如图8所示。全局配送最短路径为:RH→a1→b4→B→b3→b5→b2→b1→c1→c2→C→c3→c4→a5→a4→A→a2→a1→RH,最短路径为85.01km。
4 结论
本文介绍了ACPSO算法与2SGPSO算法在RH农场生鲜农产品物流路径设计优化中的应用,结合运行MATLAB软件得出以A、B、C为起始配送点的最短配送路径以及由农场直接配送的最短配送路径。ACPSO算法更加适合小范围内最优路径设计,ACPSO算法得到的最优值明显优于2SGPSO算法;2SGPSO算法下的收敛速度较快,多次迭代后趋于稳定,更加适合进行数量较多的配送点的路径设计优化。
猜你喜欢
小学生学习指导(低年级)(2021年9期)2021-10-14
中学生数理化·七年级数学人教版(2019年10期)2019-11-25
小学生学习指导(低年级)(2019年9期)2019-09-25
初中生世界·八年级(2019年6期)2019-08-13
小学生学习指导(低年级)(2018年9期)2018-09-26
食品研究与开发(2017年9期)2017-06-01
食品研究与开发(2017年5期)2017-04-11
小学生导刊(低年级)(2016年6期)2016-07-02
公民与法治(2016年4期)2016-05-17
计算机工程(2015年8期)2015-07-03
