基于背景约束与卷积特征的目标跟踪方法
2020-04-24 18:34王思奎刘云鹏张钟毓林智远
计算机工程与应用 2020年8期
王思奎,刘云鹏,亓 琳,张钟毓,林智远
1.中国科学院 沈阳自动化研究所,沈阳110016
2.中国科学院 机器人与智能制造创新研究院,沈阳110016
3.中国科学院大学,北京100049
4.中国科学院 光电信息处理重点实验室,沈阳110016
1 引言
目标跟踪利用图像处理、机器学习和计算机视觉等相关技术对视频图像序列进行处理和分析,并在连续的图像序列中找到目标的位置和相关信息。目标跟踪在交通、生活、军事等领域得到了广泛的应用,但运动目标普遍具有尺度变化、背景干扰、形状变化、障碍物遮挡等特点[1],这些特点使得实现鲁棒的目标跟踪算法仍面临巨大挑战。
基于相关滤波的跟踪算法近年来受到了较大的关注,其最初代表作是Blome 等[2]提出的基于最小二乘方法的相关滤波算法。该算法首次将相关滤波应用于目标跟踪,其跟踪器的求解可以转换为傅里叶频域的点乘运算,避免了高维度矩阵求逆,使得跟踪速度大幅提升,但是其跟踪精度较低。Danelljan等[3]提出的空间判别尺度估计算法引入多通道特征,并通过训练一维尺度滤波器实现了目标尺度估计。此算法速度较低,且精度仍有待提升[4]。Henriques 等[5]提出了核相关滤波的跟踪算法,使用目标周围区域的循环矩阵采集正负样本,减少训练采样,大幅提高了运算速度,但该算法无法适应尺度变化。万欣等[6]提出了基于加权全局上下文感知的方法来改善抗干扰能力,其抗遮挡能力有待提升。近年来,深度学习在目标检测和识别等领域中取得较大突破[7],许多学者将深度学习模型引入到目标跟踪中[8-10]。吴刚等[11]引入交替方向乘子方法,结合深度特征改善了跟踪方法应对快速运动及遮挡情况的能力,但该方法抗干扰能力不足。Zhu Z 等[12]提出了利用孪生网络深层卷积特征滑窗匹配的方法,此方法精度得到一定提升,但对相似语义性特征辨别能力较差。刘芳等[13]使用深度特征构造模板库,结合粒子滤波方法进行匹配跟踪,实现了较好的跟踪效果,但由于其使用多个仿射样本提取深层卷积特征来更新模板,运算量过大导致算法实时性降低,这也是大多数深度学习类算法在跟踪领域应用的缺点。
上述算法的共同点为:通过训练单一的滤波器进行目标跟踪,滤波器在找到新位置后进行迭代更新。但现实场景往往是复杂多变的,多数基于单一滤波器的跟踪算法不仅对于背景混叠以及遮挡等场景鲁棒性差,目标跟丢后无法找回,而且对于复杂特征计算还存在实时性等问题。
针对以上问题,本文提出了一种基于背景约束与卷积特征的目标跟踪方法(TBCCF)。该方法在跟踪阶段滤波器的训练求解中,不仅计算目标区域,而且考虑目标周围的背景信息,同时融合多种特征以改善跟踪响应。此外还设计了记忆滤波器配合峰值旁瓣比分析跟踪结果,若目标被遮挡或丢失,通过以卷积特征为基础的检测器对目标重捕。在计算中对多种特征使用了降维策略来改善跟踪速度。此方法在跟踪目标时,可以充分结合相关滤波的快速性与深度特征的鲁棒性特点。Visual Tracking Benchmark 数据集的50 个视频序列上的实验结果验证了所提出算法的有效性。
2 多通道特征表征及降维
2.1 多通道特征
特征是影响目标跟踪性能最重要的因素之一。HOG 特征是图像处理领域常见的视觉特征描述子,该特征能表征局部目标梯度方向分布,且对图像光照的变换能保持良好的不变性,因此该特征广泛应用在目标检测与跟踪领域[14]。fHOG 特征源自文献[15],该特征在HOG 特征基础上改进,其作者基于HOG 特征原理,通过局部数据归一化、线性插值与特征分析等方法,新定义了31 维fHOG 特征,分为18 维对方向敏感的、9 维对方向不敏感的以及4 维方向累加的梯度特征。通过大量数据验证,该特征比HOG 特征得到了更加鲁棒的效果。本文方法采用fHOG特征替代HOG特征。
由于单一的特征难以适应复杂场景的挑战,特征融合成为跟踪领域的一种趋势。本文方法采用颜色特征作为辅助,与fHOG特征产生的响应加权融合来获取最佳位置估计。颜色特征(CN)将图像的RGB 三通道特征细化为黑、蓝、棕、灰、绿、橙、粉、紫、红、白和黄共11种颜色空间特征[16]。由于fHOG 特征基于梯度的特性,其对快速形变的适应能力较差,而细化后的颜色特征对样本形状变化不敏感,求得的响应特征图能弥补fHOG特征跟踪器的不足。上述特征的可视化效果如图1。
2.2 特征降维
跟踪算法求解时,计算量往往与特征维数d 成线性关系。通过特征可视化发现,图像多维特征有冗余信息,冗余信息不仅耗费计算资源,还会导致跟踪器求解过拟合。对特征进行降维可降低计算量,加快计算速度。在此基础上,还可以扩大搜索窗以更好地应对快速运动,所以对特征的降维是有必要的[16]。PCA降维可以把高维相关变量重塑成线性无关的低维变量,是一种尽可能减少信息损失的情况下降低数据维度的方法。本文方法对样本fHOG特征和颜色特征进行PCA降维预处理。

图1 fHOG特征与颜色特征
假定原滤波器分子为N=GF,F 为样本的多通道特征,对其均值归一化后求解目标模版ut,ut用来构造投影矩阵Pt,矩阵Pt定义了一个特征投影的低维的子空间,其维度为k,k 为特征压缩后的目标维度,通过最小化重构目标模板ut的误差获取Pt:


Pt的求解通过目标模版ut特征值分解得到,投影矩阵Pt的行取Ht前k 个最大特征值对应的特征向量。滤波器更新时,用Pt对目标模板ut进行降维,将ut的列投影到Pt的行元素为基的空间里得到降维后的特征。降维后原滤波器分子的计算如下:

3 基于背景约束与卷积特征的跟踪方法
3.1 背景约束相关滤波跟踪
相关滤波方法进行目标跟踪,先给定一个目标响应y,根据输入图像A,求解一个相关滤波器,也就是滤波算子w。其求解目标函数如下:

式中,arg min f(w)是指使函数f(w)取得其最小值的所有自变量w 的集合。w 即待求解的相关滤波器参数,w ∈Rn,A 为目标图像区域特征,⊗代表相关滤波运算,y 为高斯目标响应,λ1项为防止滤波算子w 求解过拟合的正则项。
使用滤波算子w 在新一帧图像搜索区域进行滑窗并计算每个对应位置乘积之和得到响应图y͂,这种运算为“相关运算”[2]。它能够使目标与搜索区域在最相似处取得响应峰值,并在响应图y͂峰值处确定目标位置。
使用相关滤波方法进行跟踪时,求得的滤波算子w的大小与搜索窗大小是对应的。扩大搜索区域可改善目标快速运动出视野导致的目标丢失问题,使得跟踪更鲁棒。但扩大搜索窗会使滤波器求解时学习到更多背景信息[17]。因为相关运算可用卷积运算表示,由卷积定理,滤波器w 的求解通过快速傅里叶变换(FFT)在频域进行加速[2],在计算时,FFT 将图像信号进行循环拼接,当搜索窗扩大后,包含目标的拼接样本以及相似拼接背景会被囊括到滤波器的计算求解区域,在滤波器参数回归过程中,包含目标的拼接边缘被抑制,背景信息对应增强,导致求得的滤波器在新的图像搜索区域产生误判,跟踪产生漂移,经过错误累积,最终目标丢失。
为了抑制背景信息,本文以原目标函数为基础,构建了新的背景正则约束目标函数:

式中,λ2项为本文设计的与背景响应相关的正则约束项,Ai为背景图像区域特征。
公式求解可以通过一个变换来实现,将式(5)中λ2约束项与目标函数第一项合并并展开,将y 与i 个零元素合并重组,如式(6),背景图像样本Ai对应的响应为0,这样在相关滤波器求解时就限制了背景区域对核心目标信息的干扰。其形式如下:

将目标与背景区域A0~Ak的d 维特征展开,用B矩阵表示,B ∈R(k+1)n×nd,用Y 表示响应矩阵,Y ∈R(k+1)n表示展开后的滤波算子,wˉ∈Rdn:

通过以上变换,目标函数转化为:

目标函数对wˉ求导,令导数为零,可解得:

前面提到,相关运算可用卷积运算表示,通过卷积定理,滤波器wˉ的元素求解在频域进行,即点对点Hadamard 积运算,其维度与特征A 的维度一一对应,所以滤波器某一维度p 在频域可以表示为:

其中,j,l 属于{1,2,…,d},^代表频域计算,⊙代表点乘,对于新的图像Z ,其对应响应:
如图2 中,对于颜色特征,以同样的方式训练得到其响应函数rColorp。通过响应图的融合将两种方式求得的响应结果结合,得到最终的响应:

在最大响应处找到目标位置,并更新滤波器:

图3选取4种热门相关滤波方法SRDCF(绿)、Staple(蓝)、KCF(黑)、DSST(粉)与本文方法(TBCCF)(红)在混杂背景环境下进行了对比。前面已经提到,由于在跟踪场景中相似混叠背景造成滤波器被污染,多数相关滤波算法在第98帧发生漂移,图中,2.31为目标区域峰值响应,2.55为背景干扰响应。本文方法经过背景约束优化,滤波器能避免污染并保持较好的峰值响应2.31,因此可得到更好的跟踪效果。

图3 背景约束跟踪效果与滤波器响应图
图4跟踪精度曲线可看出,在混杂背景下本文方法比其他相关滤波方法的跟踪性能有明显优势。
3.2 尺度自适应计算及加速

图4 混杂背景下算法跟踪精度对比
DSST 算法[3]提出,跟踪器确定目标位置后,在该位置处为目标寻找一个最佳尺度。此方式广泛应用于多数跟踪算法。其最佳尺度通过求解一个一维尺度滤波器得到。以大小为m×n 的目标为中心,取尺度变化因子σ,设置尺度池γ,γ 取值如下:

截取目标区域若干个不同尺度的图像样本,其尺度大小为anm×ann,将这些大小不同的样本通过线性插值或压缩的方式重新统一成m×n 大小,提取其特征并延展成一维向量,如图2 中尺度滤波器示意图所示,将这些尺度不同的向量进行训练得到一维尺度滤波器,训练方式同式(4)。当新一帧图片位置确定后,用尺度滤波器匹配新位置提取的不同尺度一维向量特征,得到新位置的最佳尺度估计。其更新方式与式(14)相同。
以上尺度计算方法计算中存在一个问题,即由于提取的一维向量长度为图像宽高的乘积,其元素数往往大于1 000,导致运算量较大,因此对尺度计算降维是有必要的。但如果采用PCA 方法直接降维,计算协方差矩阵的特征值分解时,需要计算元素数大于1 000的方阵,为避免这一问题,采用矩阵QR分解的方式逐步分解矩阵。用较小的运算复杂度获得投影矩阵,最后选取投影矩阵前k 列得到投影矩阵,则训练样本特征X 和检测样本特征Z 可分别表示为:

使用Matlab对降维数据进行可视化分析,图5为不同降维空间维度k 下投影特征对总特征的贡献度,其由各特征向量在数据表征中所占的权重比例计算得来。由图可知,当降维维度k=17 时,数据表征的总损失不超过2%,但尺度计算复杂度可以由33mn lb(mn)降到17mn lb(mn),即尺度因子的求解速度提升将近1倍。所以本文方法在实际计算中,选择将目标尺度由S=33 降为SP=17。

图5 尺度因子降维分析
3.3 目标重检测
3.3.1 跟踪结果置信度
相关滤波类的跟踪方法是模板类的跟踪方法,为适应目标的变化,模板以一定的更新速率学习跟踪结果区域目标的新特征。当遮挡或剧烈形变后,算法容易产生漂移,使得滤波器学习到污染后的图像特征,非目标特征的累积最终导致跟踪失败[18],使实际应用效果受到很大的影响。MOSSE[2]算法提出使用峰值旁瓣比PSR(Peak to Sidelobe Ratio)的方法判断目标是否被遮挡,即选择目标最大响应ymax与其周围11×11 窗口区域外的旁瓣的均值μs和标准差σs来计算峰值旁瓣比PSR:

PSR能够反映响应图峰值波动情况,但当目标产生快速移动或严重混叠时,其PSR响应规律与遮挡时比较相似,仅仅使用峰值旁瓣比,无法反映目标被遮挡或丢失。
本文方法通过训练记忆滤波器评估跟踪结果。如图2 所示,记忆滤波器额外学习核心目标区域的特征。当跟踪器确定新一帧图像目标位置时,从新的目标位置处提取核心区域特征,使用训练好的记忆滤波器对该特征滤波,其响应既能作为跟踪器的响应置信度,同时可以配合峰值旁瓣比判断目标是否被遮挡或丢失。
在训练记忆滤波器时,其目标函数与跟踪阶段的求解方式相同,但记忆滤波器只提取目标核心区域小图像样本的fHOG和灰度特征,不需要背景约束。训练滤波器的同时,设置一个记忆池,记忆最近目标发生最大变化的三个姿态以及对应的滤波器参数,其中分别记录最近10 帧记忆滤波器在阈值响应内最小与最大时刻所对应的滤波器参数,为符合阈值的记忆滤波器实时参数。
为防止模型被污染,采取一个自适应的条件策略来更新记忆滤波器:如果记忆滤波器检测置信度达到阈值要求ηt,则认为跟踪结果正确;如果置信度达到阈值要求ηlr,则更新记忆滤波器模型;如果达不到阈值要求,目标可能被遮挡或丢失,此时配合峰值旁瓣比阈值Ω ,判断物体有没有被遮挡或跟踪失败。这里ηlr>ηt,记忆滤波器更新条件同式(14),更新方式与跟踪阶段相同。

式(18)中κmem-confi表示滤波器的动作,θl表示更新记忆滤波器参数,1 表示跟踪成功,0 表示目标可能被遮挡或丢失,此时调用检测器。
3.3.2 分层卷积特征重检测器
近年来,深度学习在目标检测和识别领域取得较大突破,利用卷积神经网络提取的浅层特征有丰富的轮廓特征,有助于目标的精确定位,深层特征有良好的语义信息,有助于目标的查找识别[19]。
在目标跟踪过程中,若目标丢失,借助基于深度学习的检测方法进行目标重捕获,可提升跟踪算法的可靠性。本文方法使用在Imagenet 上预训练了上千类的VGGNet-19网络提取图像卷积特征并重检测目标位置,但卷积神经网络的需要离线训练,在实际应用中,其预训练的物体类别无法概括所有类别,导致在实际应用中,无法识别个别目标。
为了更好地在通用场景应用基于深度学习的目标丢失找回机制,本文结合相关滤波方法构建了带初始化的卷积特征重检测框架。其工作机制如图6所示,首先在跟踪第一帧指定目标的同时,对重检测框架进行初始化。即使用VGGNet-19 提取目标第3、4、5 个卷积块最后一层(conv3_4,conv4_4,conv5_4)的卷积特征,然后将提取的卷积特征线性插值到同样大小的尺寸,选择合适的维度对不同层的卷积特征进行PCA降维并分别求解三个不同层对应的滤波器。其目标函数均为:

式中,Cl为分层卷积特征。将初始化得到的三个重检测滤波器存储,相当于记忆了目标的特征。这样就避免了个别目标无法识别的问题。
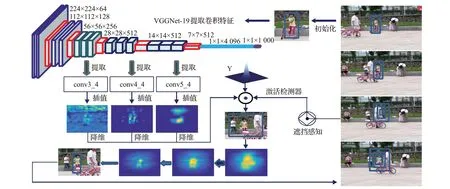
图6 重检测机制示意图
在正常的跟踪中,仅使用背景约束的相关滤波跟踪方法,当目标被遮挡时,跟踪器通过记忆滤波器与PSR置信机制感知目标丢失,并激活初始化存储的重检测器在更大的区域检测目标。重检测时,首先由Conv5_4深层特征滤波器感知语义目标大致位置,然后逐层前向递推更细粒度的目标精确坐标。卷积特征响应图gcnn通过加权组合[20]获得:

式中,ν1、ν2、ν3代表不同卷积特征响应图权重,w 代表卷积层训练的滤波器,Cconvn_4为重检测时VGGNet-19网络提取的不同层卷积特征。在响应图gcnn峰值处确定目标位置。对于检测的结果,使用记忆池的三个记忆滤波器分别进行置信度检测:如果记忆池最大置信度结果达到阈值要求ηt以及峰值旁瓣比阈值要求Ω 即认为找回了目标,此时关闭重检测器,重启跟踪器;如果记忆池最大置信度结果达到阈值要求ηlr以及峰值旁瓣比阈值要求Ω ,则更新检测器模型;如果达不到阈值要求则继续检测。这里ηlr>ηt,检测器更新条件如式(21):

式中,κcnn-confi为检测器动作信号,θ 为更新检测器参数并关闭检测器,0 代表目标未出现,检测器继续检测,1代表重捕到目标退出检测。至此重检测过程结束,返回背景约束流程继续跟踪。
使用纯卷积特征滤波器在10个OTB复杂场景数据集(Basketball,Bolt,Car1,Deer,Doll,FaceOcc1,Girl,Skiing,Suv,Woman)上进行性能测试对比与分析降维维度的选择,表1为测试的结果。由于本文方法的重检测器只需要找回目标,不需要每一帧计算并跟踪目标,所以只在第一帧初始化时采用64+128+128 的维度组合,后续检测时采用32+64+64的特征组合。
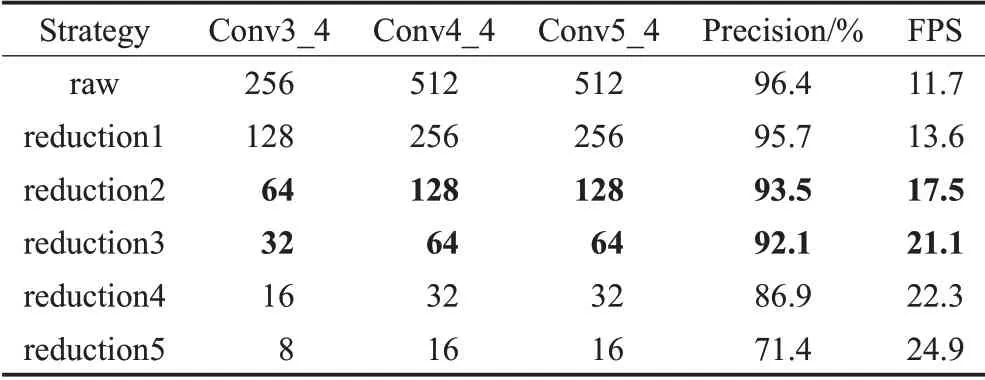
表1 不同降维策略的跟踪性能比较
使用带有初始化的卷积特征滤波器重检测机制,能够在目标被遮挡或丢失后自动感知并找回目标。如图7所示的公开数据集跟踪算法抗遮挡性能曲线图,本文方法(TBCCF)的抗遮挡能力较其他跟踪方法有明显提升。

图7 抗遮挡性能比较
基于背景约束与卷积特征的跟踪方法实施步骤如下:
算法1 基于背景约束与卷积特征的跟踪方法实施步骤
输入:初始化目标区域Bt-1=(xt-1,yt-1,st-1),位置滤波器Rt,记忆滤波器Rl,尺度滤波器Rs,检测器wc
1. repeat
2. 在上一帧目标位置(xt-1,yt-1)处获取新一帧图像区域Z ,提取其fHOG特征和颜色特征Zhc;
3. //位置估计计算跟踪滤波器Rt关于Z 的响应图fRt(Zhc),预估响应位置(xt,yt);
//置信度检测
4. if 记忆滤波器Rl的HC置信响应fRl(Zhc)≥ηt确认跟踪位置(xt,yt)正确;
5. 检查是否满足fRl(Zhc)≥ηlr,是则更新记忆滤波器Rl,否则不更新Rl;
//重检测
6. if 记忆滤波器Rl的HC 置信响应fRl(Zhc)<ηt且PSR <Ω ;
7. 激活CNN 检测器,在更大目标区域重检测,由响应图fwc(Zcnn),重新获取目标位置(xt,yt),该位置处记忆滤波器Rl的CNN置信响应fRl(Zcnn)>ηt,则确认找到位置;
8. else 记忆滤波器Rl置信响应fRl(Zcnn)<ηt,重新检测;
9. 直到fRl(Zcnn)>ηt,重新确定位置(xt,yt),检查置信响应是否满足fRl(Zcnn)>ηlr,满足则更新检测器参数,否则不更新;
10. end
11. end
//尺度估计
12. 确定新一帧位置后以该位置为中心生成尺度金字塔,用尺度滤波器寻找最佳尺度因子st;
//跟踪模型更新
13. 位置滤波器Rt更新,尺度滤波器Rs更新;
14. until 图像序列最后一帧;
输出:预估目标区域Bt=(xt,yt,st)
4 实验与分析
4.1 实验环境
本文实验平台为Matlab R2016a、OpenCV3.0、Cuda8.0,运行环境配置为Intel i5-8300H,Nvidia GTX1060,6 GB显存,8 GB内存。
4.2 实验参数设置
在跟踪实验中,设置搜索窗大小为3 倍目标区域,重检测窗为4 倍目标区域,fHOG 特征由31 维降为17维,颜色特征由11维降为4维,fHOG与颜色特征权重分别为0.75 与0.25,三层卷积特征的conv3_4、conv4_4、conv5_4层权重系数分别为1、0.5、0.5,尺度步长a=1.02,滤波器更新率η 为0.01,记忆滤波器阈值ηlr=0.4 ,ηt=0.15,峰值旁瓣比参数Ω=16。
4.3 评价指标
Object Tracking Benchmark(OTB)是目标跟踪领域著名的公共数据集,实验采用了其发布的50 个图像序列,包含光照变化(IV)、尺度变化(SV)、障碍物遮挡(OCC)、形变(DEF)、运动模糊(MB)、快速运动(FM)、平面内旋转(IPR)、平面外旋转(OPR)、低分辨率(LR)、目标出视野(OV)、背景混叠(BC)共计11种复杂场景挑战。各算法在该公共数据集上测试并取结果的平均值作为实验结果。
文献[1]提供了跟踪结果的评价方式:One-Pass Evaluation(OPE),即一遍通过的评价方式,在第一帧使用人工标注的目标位置,后续跟踪器来负责逐帧查找目标位置。
评价指标分为跟踪精度(Precision plots of OPE)、跟踪成功率(Success plots of OPE)以及平均跟踪速度(AverageFPS)。跟踪精度又名距离精度(DP),中心位置误差(CLE)表示跟踪目标位置与人工标注位置的欧式距离,DP即CLE小于某一阈值(20 pixel)占总跟踪序列长度的比值。DP越大表示算法跟踪精度越高。跟踪成功率又名重叠精度(OP),它表示跟踪得分S 大于某一阈值占总跟踪序列长度的比值,S 可通过以下公式得到:

式中,φt表示跟踪算法第t 帧实时跟踪框,φt表示第t帧真实标注的跟踪框,S 越大表示算法跟踪成功率越高。算法平均跟踪速度又称算法时间复杂度,表示算法每秒处理的图像帧数,往往通过图像总帧数P 除以跟踪算法的总耗时T 来得到。
4.4 实验结果与分析
4.4.1 定量分析
为了测试改善后的算法在快速运动、背景混叠、遮挡情况下的表现,实验选取了OTB-50中最为复杂的6个跟踪难序列Freeman4、Singer2、Girl2、Lemming、Ironman、Carscale进行测试,这些序列不仅具有严重遮挡(OCC)、背景混叠(BC)、快速运动(FM)特点,还包含剧烈光照变化(IV)、形变(DEF)、运动模糊(MB)等情形。实验同时对比了9 种近几年热门的跟踪算法,包括4 种深度学习相关算法以及5 种相关滤波类算法,为确保客观性,其他算法均是已发表文献公开的代码。
由表2对比数据所示,采用卷积特征的跟踪算法较相关滤波算法精确度有较大提升,但平均速度整体较低。在快速运动、背景混叠、遮挡等复杂挑战下,本文方法扩大搜索窗并对背景抑制,置信度判别方法自适应感知遮挡及目标丢失,并调用检测器对目标重捕获,使得跟踪方法的精确度在对比中为最优。虽然训练了大量的滤波器,但多种特征降维策略以及跟踪滤波器与重检测器并不在同一时刻运行的跟踪机制,使得本文方法的平均跟踪速度仍达到了29.2 FPS,能够满足实时性要求。

表2 6个跟踪难序列情况下跟踪算法性能比较
4.4.2 定性分析

图8 10种算法跟踪结果对比

图9 10种算法跟踪性能对比曲线
如图8(a)Freeman4 数据测试中可以看到,SiamFC由于第202 帧背景混杂跟丢了目标,随后DSST、KCF、SAMF 等算法由于第241 帧产生的遮挡逐渐漂移,最终丢失了目标。图8(b)Singer2数据测试中,第172帧由于背景混杂与光照剧烈变换,CF2、CNN-SVM、SiamFC、SAMF 等错误学习了背景并无法找回目标。图8(c)Girl2 数据测试中,第108 帧开始产生了10 多帧的严重遮挡,大多数算法由于在长时间遮挡中模型被污染,最终导致目标丢失,本文算法在目标重现后成功找回目标。图8(d)Lemming数据测试中,第379帧开始产生局部遮挡,CF2、KCF、Staple、DSST 算法很快跟丢了目标,并且在长时间测试中,到第1 136帧DCFNet尺度出现错误适应,SRDCF则产生了严重漂移。图8(e)Ironman数据测试中,第46帧的快速运动以及背景模糊、光照剧烈变化使得基于梯度特征的KCF、DSST、SAMF等算法直接跟丢,在第120帧由于相似背景CNN-SVM和SiamFC错误判断了目标位置,到第163帧大多数跟踪算法均已丢失目标,而本文方法能够排除相关干扰。图8(f)Carscale 数据测试中,第160 帧目标出现遮挡干扰导致部分算法开始漂移,随后第212、240帧的旋转和尺度大幅变化,使得Staple、CF2 和KCF 等算法错误识别了目标区域,只有本文方法保持了较好的跟踪。
通过以上跟踪算法实验效果框图可以看到,大多数跟踪算法都会在以上难例测试中产生跟丢或无法找回的情况,而本文方法能保持良好的性能。
4.5 算法总体测试结果对比
在OTB数据集的50个视频序列上测试本文方法在多种复杂情形下跟踪性能的表现,同时与其他9种算法进行整体性能比较。其跟踪成功率曲线与总体跟踪精度如图9 所示。由图9 曲线可知,算法在背景混叠、遮挡、目标出视野、快速运动等复杂挑战下的跟踪成功率有更好的表现。算法整体跟踪精度(Precision plots of OPE)为92.1%,整体跟踪成功率(Success plots of OPE)为63.6%,均为最优。
5 结语
本文对传统相关滤波算法输入图像的特征进行了降维预处理,并且针对跟踪中出现的快速运动、背景混叠、遮挡等挑战问题,提出了一种基于背景约束与卷积特征的目标跟踪方法,该方法的主要思想是通过更大搜索窗特征融合以及对目标周围背景的限制,提升跟踪器应对快速运动以及背景混叠的能力,同时设置记忆池和深度特征检测器来使得跟踪器对遮挡和目标丢失有更好的适应能力。经公共数据集大量的实验,验证了算法的有效性,实验结果表明,算法在应对快速运动、背景混叠、遮挡等挑战上具有良好的表现,平均速度也达到了实时的要求,有一定的研究与应用价值。
此外,本文方法为深度学习在跟踪领域的应用提供了一个新的思路。理论上讲,算法的置信与检测框架可以应用在大多数跟踪算法上。为了追求更好的表现,建立面向通用场景以及专有场景的数据库并将其应用于目标跟踪领域卷积神经网络的训练[7],是下一步研究的一项重要内容。
猜你喜欢
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
系统工程与电子技术(2016年7期)2016-08-21
太空探索(2016年5期)2016-07-12
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年2期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23