基于Hough变换的目标数据处理算法研究
2020-04-23 13:43:04赵华敏
无线电工程 2020年5期
陈 镜,赵华敏
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
要发挥直升机的性能,就必须提高直升机在复杂地形、恶劣气象条件下的超低空飞行能力[1]。为此,各国对直升机防撞告警设备,尤其是对电力线等障碍物的防撞告警系统的研究非常重视,直升机防撞已成为全世界关注的重要课题。
解决直升机避障可采用的技术有电磁场探测、红外探测、激光雷达和毫米波雷达等。在探测范围、分辨能力和全天候工作等多方面综合比较,毫米波雷达是理想选择。毫米波收发探测设备能在最恶劣的昼夜天气(包括冰雹、烟雾和雨雪等)情况下,对障碍物进行检测识别,为飞行员提供防撞告警[2]。
采用机载毫米波设备对电力线进行观测,发射信号选择为连续波调频波形,接收和发射同时进行,避免了距离盲区。在动态飞行情况下,录取得到电力线回波数据,分析了电力线目标的回波特征,在此基础上,采用基于Hough变换的目标数据处理算法实现了目标检测和识别。
1 电力线目标的回波特征

当f=35 GHz,p=17 mm时,θ=0,±14.6°,±30.3°,±49.1°,…。

图1 电力线回波
直升机机载雷达探测目标场景如图2所示。直升机向前飞行,在飞行过程中机载雷达对电力线进行扫描,在Bragg散射角θ处出现强散射点,点C为主峰,点A,B为副峰。另外,2个铁塔也分别产生强散射点D,E。

图2 直升机机载雷达探测目标场景
随着直升机离电力线越来越近,点A,B逐渐向点C靠近,而点D,E的位置不变。
2 目标数据处理算法
采用毫米波雷达观测电力线,目标回波主峰、副峰以及铁塔回波在一条线上。在该特征基础上,提出了相应的电力线目标数据处理算法,流程如图3所示。
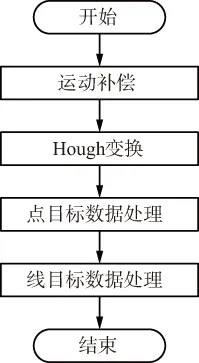
图3 电力线目标数据处理算法流程
2.1 运动补偿
雷达在行进间工作,直升机在运动过程中会发生姿态和位置的变化,因此需要先进行平台运动补偿[4-5],把目标点迹统一到同一坐标系,然后才能进行后续的数据处理。运动补偿包括坐标旋转和坐标平移。
坐标旋转是把雷达测得的目标极坐标数据转为直角坐标,再转到北东下(NED)坐标系。测站坐标系、NED坐标系和平台姿态角如图4所示,OXYZ为测站坐标系,oxyz为NED坐标系,惯导系统以NED坐标系为基准,给出平台偏航角、俯仰角、横滚角ψ,θ,τ。

图4 测站坐标系、NED坐标系和平台姿态角
设点P的测站直角坐标为(X,Y,Z)T,则NED直角坐标为:
式中,
坐标平移是把不同时刻目标的NED直角坐标统一到以最新时刻平台位置为坐标原点的NED坐标系中。
设在t0时,点P的NED直角坐标为(X,Y,Z)T,惯导系统给出平台东速度、北速度和天速度ve,vn,vu,当前时刻为t1,则更新NED直角坐标:
x=X-sn,y=Y-se,z=Z-sd,
式中,sn=vnΔt,se=veΔt,sd=-vuΔt,Δt=t1-t0。
2.2 Hough变换
Hough变换示意如图5所示。
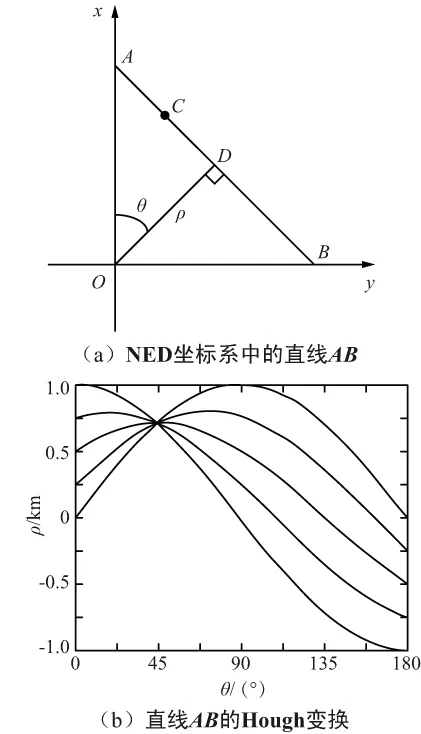
图5 Hough变换示意
点C是直线AB上的一点,NED直角坐标为(x,y)T,从原点O向直线AB做垂线,垂足为D,通过Hough变换方程[6-8]:
ρ=xcosθ+ysinθ,
建立起(x,y)T~(ρ,θ)T的映射,其中,ρ为从原点O到直线AB的距离,θ为垂线OD与x轴的夹角。
从直线AB上取几个点,通过Hough变换后得到参数空间中的曲线,这些曲线交于一点[9]
在单帧目标数据处理中,先对运动补偿后的点迹进行Hough变换,然后通过峰值提取找到交点,再对交点进行反变换,得到电力线[10-12]。
2.3 点目标数据处理
点目标包括电力线、铁塔以及其他点目标。
对于经多次观测,不能汇集成线的点目标,则认为是其他非电力线类目标,予以剔除。对能够形成连线的点目标认为是电力线点目标,处理时一直保留[13]。
铁塔点目标需要进行相关判断后决定是否保留。
若以前、当前铁塔点目标P1,P2的NED极坐标(r1,α1)T,(r2,α2)T满足:
|r1-r2|≤Gr,|α1-α2|≤Gα,
(1)
则点P1,P2相关,其中,Gr,Gα为距离、方位相关门[14-16]。
对于相关的点P1,P2,进行数据融合,得到融合点P的NED直角坐标:
(2)
式中,(x1,y1,z1)T,(x2,y2,z2)T分别为点P1,P2的NED直角坐标。
若点目标连续m次相关上,则一直保留该点目标;若点目标连续n次没有相关上,则删除该点目标。
2.4 线目标数据处理
线目标上的点目标包括铁塔、电力线点目标。确认为线目标的数据继续进行流水式相关和跟踪处理,若多次观测后,同一位置处线目标上的点数太少,则认为是虚假目标予以删除;否则,认为是真实的电力线回波,保留该线目标,同时保留线目标上的电力线、铁塔点目标[17]。
若以前、当前线目标L1,L2的参数(ρ1,θ1)T,(ρ2,θ2)T满足:
|ρ1-ρ2|≤Gρ,|θ1-θ2|≤Gθ,
则线目标L1,L2相关,其中,Gρ,Gθ为ρ,θ相关门。
对相关线目标L1,L2上的铁塔点目标,按式(1)和式(2)进行相关判断、数据融合。
若线目标连续m次相关上,则一直保留该线目标,并给出目标告警信息;否则,若线目标连续n次没有相关上,则认为是虚假目标,进行消批处理[18-19]。
3 试验结果
为验证数据处理模型和算法的有效性,对实际电力线进行了探测试验,试验设备主要参数为:工作频点35 GHz、信号带宽100 MHz、方位波束宽度1°以及俯仰波束宽度2°。试验的电力线距离雷达设备约3 km,试验结果如图6所示,其中,虚线为处理出来的电力线目标。

图6 目标数据处理试验结果
由图6可以看出,电力线回波幅度呈现出一定的周期性,导致线段不连续,在相邻的2个检测点目标中间的区域,由于散射信号弱,未能检测到信号。整体来看,由于检测到的点数较多,且呈现明显的线段分布特性,可以实现有效的目标检测。另外,几簇密集分布的面目标为铁塔目标,幅度较强,间隔约400 m,铁塔目标和电力线回波可综合进行数据处理,互相印证、协同处理。
试验结果表明,毫米波设备探测到了电力线、铁塔回波,经过数据处理,完成了电力线目标的有效检测。
4 结束语
为保证直升机的飞行安全,在飞行过程中,及时发现飞行航路中的电力线具有非常重要的意义。采用毫米波收发设备探测电力线,能够在各种天气条件下为直升机提供目标指示。通过研究电力线的回波特征,提出了一种基于Hough变换的目标数据处理算法。在该算法中,对目标进行运动补偿,通过Hough变换检测直线,再对检测出的点目标、线目标进行相应处理。为验证模型和算法的有效性,进行了实际电力线探测试验。结果表明,所提出的数据处理模型和算法能有效发现电力线,可以应用于直升机防撞。
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26 14:31:10
中学生数理化·七年级数学人教版(2022年4期)2022-04-26 14:31:04
中学生数理化·七年级数学人教版(2021年4期)2021-07-22 03:15:58
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
汽车工程师(2018年1期)2018-07-13 00:47:56
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
电子制作(2017年14期)2017-12-18 07:07:59
中国公路(2017年13期)2017-02-06 03:16:33
电信科学(2016年11期)2016-11-23 05:07:50
民用飞机设计与研究(2015年3期)2015-12-07 12:09:31