
基于光栅投影的叶片轮廓测量技术研究现状
2020-04-23 01:22魏鹏轩贾卫博杨兴
电子技术与软件工程 2020年5期
魏鹏轩 贾卫博 杨兴
(电子科技大学机械与电气工程学院 四川省成都市 611731)
1 引言
叶片作为航空发动机的重要组成部分,但由于叶片的工作环境恶劣和扭曲程度大等特点,使得叶片成为整体环节中最易出故障的部位,因此叶片轮廓和质量的检测成为发动机生产制造过程中的关键环节[1]。
目前叶片测量的方法主要有接触式测量和非接触式测量,接触式测量有标准样板法、三坐标测量机法等,当需检测叶片的数量非常多时,该种方法测量效率低下;同时叶片多为扭曲度较高的自由曲面,这使接触式测量十分困难。非接触式测量法包括轮廓投影法、干涉法、激光三角法和光栅投影测量法等,其具有非接触,高效率和高精度等检测优点[2]。传统轮廓投影法通过投影展示叶片轮廓形状,但投影与理论轮廓存在配准问题,且环境光影响极大;干涉法测量精度高但是视场太小,不适合叶片的整体结构测量;激光三角法测量方式灵活多变,但是局限于线面激光,测量效率有待进一步提升;光栅投影测量法属于面结构光技术,利用投影光栅和相位计算实现三维形貌重建测量,大大提升了测量效率和测量精度。基于光栅投影的叶片轮廓测量技术可分为四个关键技术和方法,分别是光栅投影方法、标定方法、光栅投影解相方法、多视角点云拼接技术,故本文将从以上四个方面对基于光栅投影的叶片三维轮廓测量研究现状进行阐述。
2 光栅投影叶片三维重建方法研究现状
2.1 光栅投影方法研究
现有的光栅投影方法一般分为傅里叶变换法、莫尔轮廓术和相移法。
傅里叶变换法的基本原理是对调制条纹图像进行傅里叶变换、频域滤波和傅里叶逆变换来提取条纹的相位信息。日本学者Takeda[3]于1982年首先将傅里叶频谱分析用于包含物体信息的光栅条纹的相位展开。
莫尔轮廓术的基本原理是投射光栅A 在待测物体表面,形成由物面调制的像栅,再在观察点处透过光栅B 获取叠栅图样[4]。莫尔轮廓术装置简单,在工业三维型面测量上应用广泛,但分辨率和精度受物体表面倾斜度、和阴影等影响,不适合进行高精度测量。
相移法[5]是通过投影不同相位的光栅图,分析待测物面表面调制后的条纹图像从而进行相位展开,最终获得待测物面各点深度信息。其计算效率高,测量精度通常小于0.1mm。
2.2 标定方法研究
现有的基于数字光栅投影的标定方法有以下三种: 摄影测量法、三角测量法和多项式拟合法。
摄影测量法是建立在小孔成像的基础上。该方法把投影仪看作逆相机,根据相机标定原理对投影仪逆标定。FALCAO 等人[6]用投影仪向棋盘格实物标定板的空白处投射棋盘格图案,先标定出相机的内外参数,再根据投影棋盘格角点的极线,由线面相交其角点坐标。
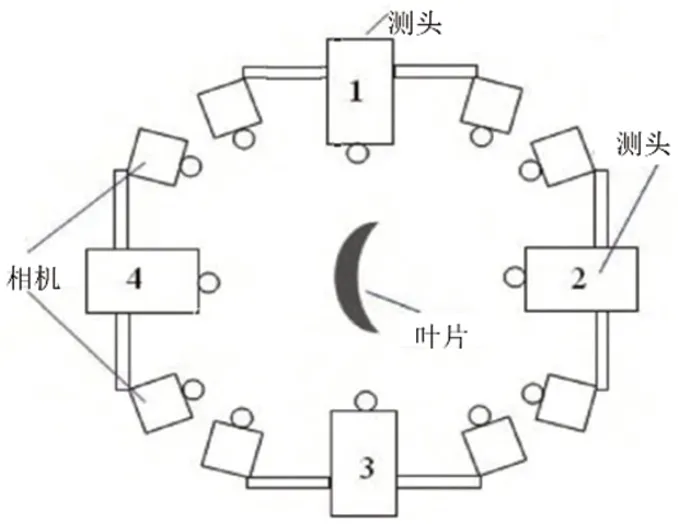
图1:多视觉设备拼接

图2:人工标志点拼接
图3:特征单元拼接
三角测量法是根据光路的几何关系建立物像点坐标之间的关系式,从而进行系统标定参数的求解。JIA 等人[7]提出了一种标定模型,需要标定的参数包括基线长度、焦距,及相机光轴与世界坐标系x 轴的夹角。
多项式拟合法[8]假设待测物的世界坐标和其在图像坐标系中对应位置的相位可用多项式表达,直接建立了二维到三维的坐标映射。多项式拟合法的优点在于避免标定相机和投影仪的具体参数,但为保证标定精度,则需要复杂的多项式拟合,极大的增加了计算量。
2.3 光栅投影解相位方法研究
现有的光栅投影解相位方法分为以下三种,其中有多频时、多波长和数论算法。这三种算法的共同思想是借助一个(或多个)具有不同条纹周期的附加包装相位映射来展开相位。
多频时法是由Нuntley 在1993年首先提出的,后来被其他人研究和改进。根据条纹序列的类型,这些算法可以进一步分为几个类别:线性序列,指数序列,反向指数序列等。
多波长法又称是由20 世纪70年代初的全场移相干涉术和全息术的结合发展而来的。几十年后,这种技术被Reich C在FPP中引入,可以有效的解决相位不连续问题。
数论方法是基于相对素数的性质的。最初是由Gushov 在1991年引入的,他们使用至少两个相位图,条纹频率与相对素数成正比。Zhong 等人[9]在2001年提出了另一个有趣的改进,他们引入了一个查找表(LUTs),用于简单快速的两相图展开相位。
2.4 多视角点云拼接技术
针对多视角点云数据拼接,现有的三种拼接方法为:基于多视觉设备拼接、基于人工标志点拼接和基于特征单元拼接。
基于多视觉设备拼接方法一般采用多套视觉测量设备,从而直接获得多个视角的位置关系。Yue[10]提出一种全局测量结构,从四个角度同时获取叶片点云数据并进行拼接。这种测量方法可以直接根据测量数据进行点云拼接;但其需要多套设备,成本太高,且需要一定测量空间。
基于人工标志点拼接方法是人为在被测物表面或周围粘贴标志点,在获得被测物表面数据的同时也获取了标志点的坐标位置,通过匹配两个测量视角内的公共标志点实现拼接。该方法操作简单,灵活度高,但是人为布置标志点降低了测量效率,且标志点一定程度上遮挡了被测物体,会导致数据缺失。
基于特征单元拼接方法是从测量数据中提取相同特征单元进行特征匹配,如特征点、直线或局部特征等。这种方法要求测量物体有一定的特征,对于特征不明显的测量数据难以找到正确对应,通用性不强,并且一般计算量都较大。
3 叶片结构光测量系统
在叶片三维测量系统的开发中,国外起步较早,已经取得了很多的成果。西班牙的Nub3D 公司开发的Triple 系统利用编码白光投影进行叶片的测量与轮廓提取,精度可达10um 左右。GOM 公司开发的ATOS II Triple Scan 测量系统则是利用蓝光投影进行叶片测量,并实现测量数据模型重构和误差比对,测量精为0.02-0.62mm。加拿大 Creaform 公司的便携式扫描仪 handyscan3d、法国的ATOS的ATOS scan5 三维扫描仪等也都是业内较好的三维扫描系统。
我国的三维扫描测量技术研究起步晚,但也取得了丰硕的成果。史升玉[11]研究了三维测量技术的系统体系框架,并根据测量场合对精度与量程的要求,选择不同的硬件开发出两款结构光三维测量系统;同样不少企业也致力于该项研究,先临三维的EinScan130桌面3D 扫描仪、天远公司的OKIO-5M 工业三维扫描仪均取得了不错的成绩。
4 结论
通过对基于光栅投影的叶片轮廓测量技术的研究现状分析可得出,目前国内外对叶片三维测量技术的研究均已有了阶段性的成果,尤其国外的叶片三维测量技术发展较为成熟,其包括三维测量理论与逆向重构软件两个方面。
但针对叶片的轮廓测量关键技术中存在尚未完全解决的问题,其中包括叶片反光问题,一般需要对表面进行喷粉处理,不但降低了测量精度和效率,甚至会对叶片表面造成损伤;非线性误差问题,标定过程中会因为硬件或环境原因导致标定结果有误差;解相位误差问题,解相位过程中不可避免受到环境光或者物体断层等影响导致解相位错误;点云拼接问题,单次捕捉到的点云数据精度相对较高,但是拼接过程往往会使测量误差扩大一个数量级。因此在叶片型面的快速三维测量方法和逆向工程软件开发两个方面仍需进一步研究。
猜你喜欢
小福尔摩斯(2019年2期)2019-09-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
测控技术(2018年12期)2018-11-25
传感器与微系统(2018年7期)2018-08-29
高师理科学刊(2016年8期)2016-06-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
计算机工程与设计(2014年9期)2014-12-23
娃娃画报(2014年9期)2014-10-15
物理与工程(2014年4期)2014-02-27
