先“刹”为敬 Bosch博世AEB自动刹车系统测试
2020-04-20 10:45许晖
汽车之友 2020年1期
许晖

车辆日益增多,道路更加擁挤,令人烦躁的缓慢驾驶,驾驶员的疲劳分心,人类所要面对的是出现频率越来越多的交通事故。根据美国国家公路交通安全管理局的数据,94%的事故与人为错误直接相关,根据世界卫生组织的数据,每年因汽车造成的死亡人数高达125万,这意味着几乎每25秒就有1人死于车祸。如何降低事故所产生的伤害,最直接的方式便是把车刹住,更为直接的方式就是让车辆自己把自己刹住。为此AEB自动紧急制动系统成为了义无反顾的守护者。面对车前的危险,大有一种我自先“刹”为敬,诸位大可随量的英雄气概。
AEB的前世与今生
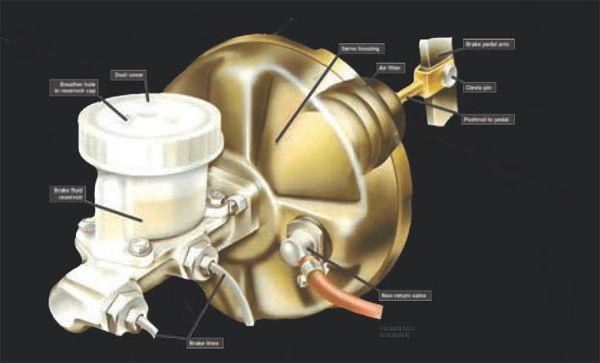
要介绍AEB(Autonomous Emergency Braking),必须先从车辆的制动历史说起。可以说汽车的制动系统发展就是一场微型的“自动驾驶技术”预演。早期的制动系统属于十分纯粹的机械连接,整个系统之中并没有为驾驶者提供任何的助力,车辆所需要的制动能量,完完全全由驾驶者自身力量所提供,极度考验驾驶者的体能体格。如何才能让弱不禁风的驾驶者有效刹停行进之中的车辆?可以说以当年的科技水平,汽车工程师已经将杠杆原理玩到了极致,虽然效果并不好,倒也解释了女性驾驶者甚少的原因。
到了中期,为了解决刹车比开车还累的窘况,汽车工程师开发出了各种形式的助力系统。诸如采用气压能、真空能、或者液压能等等伺服能量,在原来的“人力制动系统”基础上补充并协助提供更大的力量。轻盈的刹车力度瞬间令驾驶门槛降低,让不少新手迅速成为驾驶者的角色,但其实刹车从来都是一个带有预判提前量的技术活。不少人没能很好地掌握刹车的时机以及力度,过分依赖助力系统,也带来了副产品“一脚急刹”。


老爷车的手刹
带助力系统刹车

早期的鼓刹系统

1969年乘用车防抱死系统的速度传感器1969年乘用车防抱死系统的速度传感器

1978年出现的ABS组件(液压调制器和控制单元)

ABS的出现被誉为汽车业界三大安全发明之一
早期的鼓刹系统
在当年车身稳定系统并不盛行的时期,一脚踩死的后果就是令刹车力道过大,导致车轮锁死,而造成车辆滑行、刹车距离增加,等等无法预测的情况。为此工程师发明了被视为行车安全历史上最重要的三大发明之一“ABS”(防抱死系统)。装有ABS系统的车辆在车轮即将达到抱死临界点时,制动系统在1s内可作用60~120次,相当于不停地制动、放松,类似于机械自动化的“点刹”动作,此举可避免紧急制动时方向失控与车轮侧滑,提高制动效率。值得一提的是,广义上的ABS系统起源可以追溯至1936年Bosch所申请的“防止汽车车轮锁死机制”的专利。
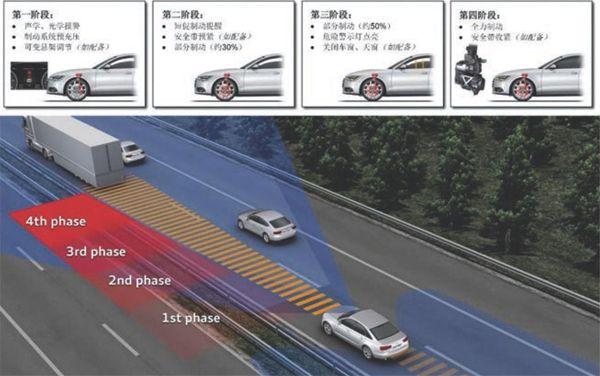
PEBS四阶段工作图
现实总是残酷的,即便各种各样先进的制动技术加入到车辆配置之中,但只要刹车的主导仅一天仍在人类的手里,那么总会在需要紧急制动的时刻,迸发出各种情况。车速的提升已经成为考验驾驶员反应力的新门槛,人类仿佛回到了无助力刹车年代,只不过门槛从是否够“力”制动变成了是否够“快”制动,自此AEB系统对应市场痛点应运而生。从出现到落地,AEB具有实效的主动安全性能,迅速被车企所接受。Euro NCAP、IIHS、JNCAP等全球NCAP纷纷将其纳入评估打分体系,对于没有配备AEB的车型而言,已经很难得到最高等级的评价。
博世的PEBS系统
绝大多数的AEB系统解决方案均由汽车行业的供应商所开发,如耳熟能详的博世、大陆、采埃孚以及德尔福等等企业,都有各自属于自己的AEB系统解决方案。这套系统在现在的汽车上已经广泛配备,只是命名可能各不相同。如丰田的PCS、奔驰的Pre-safe安全系统、大众的Front Assist、沃尔沃的City Safety、斯巴鲁的Eye Sight等等其实均含有AEB在内。
本次在博世东海测试场所体验的AEB属于博世PEBS系统内的一个子系统,其与PCW预测性碰撞报警、EBA紧急制动辅助子系统,共同组成了博世著名的PEBS(Predictive Emergency Braking System),可以说该系统涵盖了从感知到决策再到执行的整个周期,属于整合型功能合集。
PEBS系统的工作原理并不难理解,整套系统按照距离远近,从侦测到碰撞物开始,一共分为四个工作阶段。第一阶段先以声学、光学报警通知驾驶者,同时制动系统开始预充压,调节可变悬架;第二阶段开始以短促制动为提醒,同时开始安全带预紧动作,并产生大约30%强度的部分制动;倘若车辆继续接近预碰撞物体,则进入第三阶段,这个时候将会提供约50%强度的部分制动,同时点亮危险警示灯,并关闭车窗与天窗;当驾驶者仍没有任何主动接管车辆制动的行为,那么系统将自动进入第四阶段工作,这个时候车辆将全力制动并配合提供安全带主动收紧。可以看出,PEBS系统按照距离预碰撞物远近循序渐进,有条不紊地接管车辆的制动功能。最终令车辆制动并安全刹停,确保不会因为驾驶员不作为而发生碰撞事故。
众所周知,车辆感知外界周遭信息,所牵涉到的传感器多种多样,但主要是摄像头、超声波、激光雷达、毫米波雷达以及GPS,测距和IMU惯性测量单元这几种。却终归没有任何一种传感器属于全能多面手可以通吃到底。它们或多或少在探测特性上都有着不同的优缺点。譬如AEB系统常用的毫米波雷达,弱点在于侦测横向距离与速度的不确定性,其对于侦测纵向距离以及速度更为拿手;而从2D单目摄像头进化到双目的3D多功能摄像头,虽然可以准确分辨目标方位角以及横向速度,却受制于无法准确判断纵向距离与速度。为此博世工程师决定巧妙地将毫米波雷达以及多功能摄像头,两种传感器的有效数据进行融合,让它们协同探测目标,并辅以两者均可共同确认提供的,目标存在概率以及目标类型作为冗余信息融合,这样一来大大提高了PEBS系统的准确率以及精确度。

博世底盘控制系统市场与战略发展总监丰浩

Bosch拥有丰富的驾驶员辅助产品矩阵

AEB动态障碍物预碰撞测试

AEB静态障碍物预碰撞测试

动态自行车假人障碍测试
有趣的实地测试
纸面上的知识说多了容易乱,是骡子是马总归需要拖出来溜溜。本次针对博世自动紧急制动系统的测试场地,位于博世(东海)汽车测试技术中心内的制动测试区域。在目前的ADAS系统中,预测性防碰撞制动系统(PEBS)所面对的场景主要包括车对车防碰撞、车对自行车保护以及车对行人保护等各种类别。为此测试当天,我们所体验的博世PEBS系统测试项目,包括了静态气球车测试、动态气球车测试、行人以及自行车动态测试四大场景。

测试假人价值不菲

测试道具气球车

(东海)汽车测试技术中心
测试过程看似簡单,可实际上其中包含着硬核技术实力。为了追求真实度,目前PEBS的测试对象主要是气球车、模拟行人与模拟自行车三项,这也正是日常车辆行驶与道路上时主要面对的实际情况。测试所采用的模拟假人与车辆道具均符合Euro NCAP与C-NCAP标准。比如在气球车内所藏正对后方的三角锥,必须能对后车毫米波雷达释放的电磁波进行反射,模拟正常汽车反射的电磁波,气球车后方的上下均有等宽的铝条来模拟车宽。同时,气球车的前部设置了吸波纸,避免电磁波直接穿过气球车受到其他信号的干扰。力求最大程度模拟出真实车辆的情况。
实际测试阶段还是挺有意思的。也许导我没安好心,当得知测试道具昂贵的造价之后,总是希望测试车辆能结结实实地怼上测试道具。可博世的PEBS系统似乎一点妥协的意思都没有。如上文所介绍的一样,不论是静态车对车测试还是动态车对车测试,PEBS系统均严格执行了预警阶段、预制动阶段、部分制动阶段以及全力制动阶段四个环节,并最终稳稳停在障碍物跟前。在对动态假人以及动态自行车假人的测试之中,虽然目标明显比气球车要小,但是PEBS系统同样稳定地完成了测试。
AEB系统的未来
或许有人会认为,现在博世所提供的AEB系统,似乎已经足够应付主机厂产品上路的需求。不过在我看来,现在AEB技术的发展顶多属于自动驾驶领域L2级别的应用场景需求,还远未到“足够”的阶段。越是接近自动驾驶领域的高层级,那么所需系统将会越为严苛,不但感知层面需要更高性能且可以互为冗余的传感器,决策层面的处理器也需要更高的运算能力。在完全释放人类对油门与刹车的最终控制权之前,AEB仍有很长的一段路需要前行,更别提在跨越了自动驾驶L3级别之后,面对L4甚至L5层级的自动驾驶车辆,如何让它们把自己稳稳刹住将是全新的课题,革命远未成功,大家仍需努力。
结语:
你会因为一台车没有安全带而拒绝购买么?是的,因为每一台车都有!你会因为一台车具有AEB系统而优先购买么?是的,因为不是每一台车都有!这话没毛病!不怕一万,就怕万一,请允许我有先“刹”为敬的觉悟。
国际上对于AEB测试已经有成形的测试方法与手段

猜你喜欢
汽车观察(2020年6期)2020-07-18
新能源汽车报(2019年13期)2019-06-11
汽车观察(2019年12期)2019-02-02
科学家(2017年20期)2017-11-10
海外星云(2016年15期)2016-08-04
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
汽车之友(2015年8期)2015-06-08
汽车之友(2015年9期)2015-05-06