
单光子激光雷达数据去噪与滤波算法
2020-04-17 12:51张永生童晓冲杨伟铭
导航与控制 2020年1期
李 凯,张永生,童晓冲,杨伟铭,董 鹏
(1.军事科学院系统工程研究院后勤科学与技术研究所,北京100071;2.战略支援部队信息工程大学地理空间信息学院,郑州450001;3.北京航天控制仪器研究所,北京100039)
0 引言
20世纪90年代早期,第一台商用机载激光雷达系统TopScan研制成功。经过20余年的发展,激光雷达技术已经被广泛应用于测绘领域,成为地理空间信息获取的一种重要手段。然而,随着传统线性激光雷达技术的成熟,其测绘能力的提升空间也越来越小。线性激光雷达一般采用较大的发射脉冲能量以及较低的飞行高度(较低的条带宽度)以获取足够的激光脉冲回波能量,但这都导致获取激光雷达数据的成本和时间代价增加[1]。因此,当使用线性激光雷达针对较大面积区域进行测绘任务或对同一区域进行长期动态监测时,时间和成本代价会限制传统激光雷达的应用能力。
近些年,单光子激光雷达技术开始渐渐成熟[2-4]。不同于线性激光雷达在探测回波信号时需要数以百计的光子形成弱光返回信号,单光子激光雷达采用单光子敏感探测器,也就是说,每发射一个激光脉冲,新型的激光雷达只需要探测到若干光子的返回信息,就可以获取被探测物体的位置信息。这使得激光光源产生的光子得到更有效地利用,大大减少了激光发射脉冲所需能量,同时使得激光雷达的作业高度大幅提高。这些技术优势也使单光子激光雷达更适用于卫星激光测高任务,美国2018年9月15日发射的新一代监测冰盖和海平面变化的ICESat-2卫星所搭载的激光高度计ATLAS就放弃了第一代传感器GLAS所采用的全波形记录技术,而采用了单光子探测技术。GLAS激光发射频率仅为40Hz,而ATLAS激光脉冲发射频率设计为10kHz,这使沿轨方向地面激光足印的间距由172m左右减小至约70cm,极大地提高了ATLAS沿轨方向的数据采集密度[5]。为了验证ICESat-2搭载传感器的可用性并开发适用于单光子激光雷达数据的处理算法,NASA研制了机载单光子激光雷达系统MABEL并向全球用户免费提供其数据产品[6]。因此,通过对MABEL数据进行研究,能够为机载和星载单光子激光雷达技术的应用提供理论依据。
单光子探测技术在采集数据时具有一定的优势,但是其极高的探测灵敏度同时也给点云数据带来了较大的背景噪声[7]。因此,单光子激光雷达的数据去噪问题是获取精确地形首先需要解决的问题。本文提出一种改进的基于局部距离统计的点云去噪算法初步去除了单光子激光雷达噪声信息,从剩余的点云数据中进一步利用统计分析方法提取地面点,同时进一步去除地面以下噪声点,并以传统机载激光雷达的数字地形模型(Digital Terrain Model,DTM)作为参考数据,对从单光子激光雷达数据中提取的地面点云和生成的数字高程模型(Digital Elevation Model,DEM)数据进行对比验证。
1 单光子激光雷达点云去噪和滤波模型
1.1 实验数据介绍
(1)MABEL 数据
MABEL是搭载在NASA ER-2飞机上的单光子激光雷达设备,MABEL的飞行高度约为20km,飞行速度在200m/s左右,MABEL的激光脉冲重复频率可在5kHz~25kHz范围内调整。因此,在标称飞行条件下,若采用10kHz的脉冲重复频率,沿轨方向激光脚点间距为2cm。此外,MABEL利用发射器光纤分束器将一个发射脉冲分离为8个近红外(1064nm)波束和 16个绿色(532nm)波束,且可以根据测量需求在-3°~+3°范围内调整发射波束的下视角[8]。结合飞机上搭载的GNSS和惯性导航系统,MABEL在工作状态下能够记录每个返回光子的往返时间和三维位置信息。MABEL点云数据处理结果分段存储于HDF格式文件中,每个文件包含60s飞行数据。其中,由每个子波束返回信息得到的点云数据存储在一个通道(channal)中。本文选择MABEL在North Carolina中北部区域的一个完整数据段进行处理,该数据在位于近红外波段的44通道返回的光子数量最多,而噪声信息也相对较多。因此,实验中以44通道的点云数据为例检验本文提出的算法并利用参考数据进行验证。MABEL点云数据为剖面点云,在进行去噪处理时通常在二维空间内进行,即将平面坐标转换为沿轨距离,纵坐标为点云高程信息。本文使用的MABEL点云数据如图1所示。

图1 MABEL剖面点云数据Fig.1 Diagram of MABEL point cloud data
(2)传统机载激光雷达数据
传统机载激光雷达数据来源于G-LiHT(Goddard's LiDAR, Hyperspectral & Thermal Imager)系统。单个的传感器获得的数据在与其他数据融合时,由于坐标基准等不一致,融合存在较大困难,而G-LiHT则将多种传感器集成在一起,减轻了数据融合处理的难度。该系统集激光雷达、成像光谱仪、热成像仪、GPS-INS于一体,以同时获取植被结构、地物光谱、表面温度等数据,并通过这些数据之间的融合处理为大尺度生态系统的科学研究提供高分辨率(<1m)观测数据[9]。 本文使用的数据获取时间为2011年8月,其中激光雷达点云由Riegl VQ-480获取。G-LiHT还提供了由点云数据处理得到的1m分辨率DTM数据,本文即利用该数据与MABEL数据处理结果进行对比。在UTM(Universal Transverse Mercator)17N投影带中,DTM数据与MABEL数据的覆盖范围如图2所示,该图的左上角坐标为(650360.0000E, 3997988.0000N), 右下角坐标为(652768.0000E, 3997988.0000N)。 图 2中, 白色区域为DTM数据,里面的黑色实线为MABEL点云数据运行轨迹的投影。与MABEL数据段作对比的DTM数据由5个文件拼接而成,故相邻文件之间存在少量的数据缺失。

图2 DTM数据与MABEL数据的叠加显示Fig.2 Overlay diagram of DTM data and MABEL data
1.2 MABEL点云去噪和滤波算法
(1)改进的基于局部距离统计的点云初步去噪算法
当前,针对MABEL点云数据的去噪算法主要可以分为两类。一类将MABEL点云数据栅格化为数字影像,再通过边缘检测等数字影像处理技术分离噪声点[10-11]。这种算法在点云数据栅格化过程中造成信息损失,因此使去噪结果精度降低[12]。另外,点云栅格化形成的图像尺寸很大,在地面上一小段距离就能生成上百万像素的图像,这使得数据处理的计算量和时间增加[13]。另一类则根据信号和噪声光子的分布特征,直接对点云数据进行处理。这种算法利用局部点云之间的统计量作为判断阈值,较常用的统计量有局部点云的密度、模、均值、方差等[13-15]。该算法能够剔除大部分的背景噪声,保留较多的点云信息。但是,随着统计范围的增加,不同区域地形坡度、点云密度、地物形态的变化也越显著,全局阈值的确定也越来越困难,噪声光子难以完全消除,尤其是误分类的真实地表下的噪声点云使提取的地形产生较大误差。
文献[12]依据噪声点和非噪声点的局部密度差异,提出了一种基于局部距离统计的点云去噪算法。该算法计算点云中每个点到最临近k(k=50)个点的局部距离之和,并根据局部距离之和的频数直方图拟合Gauss函数,计算Gauss函数的均值和方差,以均值与t(t=2)倍标准差之和作为阈值去除噪声点。将该算法应用于小段MABEL实验数据,实验结果较好,算法有效剔除了大部分噪声光子,同时能够处理具有一定地形坡度的点云信息,且该算法计算较为简单。但是,该算法在实际实验中保留了少量地面以下的噪声信息,在滤波处理时,这些点都是局部最低点,将这些点全部作为地面种子点拟合地形曲线,会给滤波结果带来较大误差。此外,在进行实验时仅选取MABEL在532nm通道的一小段完全被植被覆盖的区域,该段区域地表下的噪声光子数较少,且地形特征较为单一。实际情况下,在完整的MABEL数据段中既有植被覆盖区域,也有裸露的地表。而在不同的区域,非噪声点云的密度也不相同,在点云稀疏的裸露地表区域、植被冠层顶部以及植被冠层内部非噪声点云的密度甚至会小于噪声点云。这就会使得在选择较大阈值以保留所有非噪声点情况下,更多的噪声点被分类为非噪声点,选择较小阈值又会使非噪声点被错误分类为噪声点。因此,本文使用噪声信息更加丰富的完整MABEL数据段检验该算法和本文提出的改进算法。
一般来说,在MABEL点云信息中,非噪声点云在水平方向(沿轨方向)的聚集程度明显高于垂直方向(如图1所示)。因此,在使用局部距离统计作为阈值判定某点是否为噪声点时,本文给水平方向的距离增加一个适当的权值因子ρ,使水平方向点云信号聚合度更高。这样,在原始距离统计算法中使用的Euclidean距离表达式就变为

式(1)中,P、Q为点云中任意两点, (xP,yp)、(xQ,yQ)分别为P、Q在水平方向沿轨距离和垂直方向上的高程。在本文实验中,ρ取0.1。通过加入权值因子,使沿水平方向或接近水平方向的高密度点云更可能被分类为非噪声点云。依据式(1),MABEL点云初步去噪算法的步骤如下:
步骤1:建立 MABEL点云数据的 K-D树索引,搜索距离每个点最近的k个点。
步骤2: 计算第i点Pi到距离最近k个点Qj(j=1,2,…,k)的“距离”之和的平均值Di, 距离计算公式如下

步骤3:以0.1m为距离间隔统计平均距离Di的频数,生成频数直方图。
步骤4:以频数直方图峰值位置对应的距离作为均值,以峰值位置对应距离与最小平均距离的差值作为标准差,用Gauss函数拟合频数直方图,阈值设置为均值与t倍标准差之和,保留平均距离小于阈值的点为初选信号点,其余点为噪声点。
(2)基于统计分析的点云滤波算法
提取去噪后点云中地面点的方法通常是在一定的窗口范围内查找点云高程的最低点,以最低点作为地面种子点,再通过曲线拟合方法选取地面点[12,16]。在实际情况下,点云经过去噪处理后,地面以下通常还会含有一定量的噪声信息,而选取地面种子点时由于这些点低于地面,往往被误选为地面种子点。利用这些点进行曲面拟合会造成植被和地面点云的错误分类,且使提取的地形低于真实地形。因此,需要在滤波的过程中进一步剔除地面以下的噪声信息。迭代曲线拟合是一种可选的方案,然而地面种子点分布本来就较为稀疏,迭代过程又进一步造成数据的抽稀,这会造成拟合结果精度降低,同样影响分类结果。此外,该算法在迭代过程中阈值的选取也较为困难。
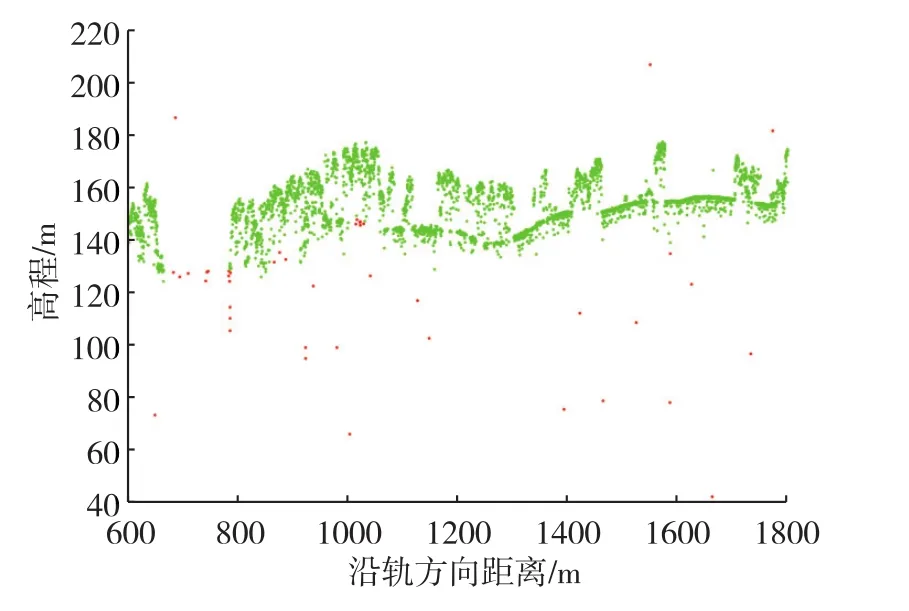
Horan等[13]引入统计分析的方法剔除了Greenland岛冰川区域采集的单光子激光雷达数据中的噪声信息,该方法认为单光子激光雷达点云的分布近似于Dirac delta函数,而该函数中的极大值即对应地面点云的分布。实现该方法的基本思路为:在沿轨方向上以一定的间隔将点云分割,对于每一小段点云,将点云的高程四舍五入至整数米,并计算取整后该段点云的模(频数最大的高程值),则与模的高差在设定经验阈值内的点被选取为地面点。然而,将该方法直接应用于植被覆盖区域的点云,存在以下问题:1)在某一分段区域可能不存在信号点云,则计算得到该段点云的模值为某一噪声点的高程,这可能严重偏离实际值,造成较大粗差。例如以20m为间隔分段时,在图1中沿轨方向760m~780m不存在信号点云,该段点云模值为1134m,远远超出了实际高程。2)在树木茂密区域,林下地面返回的信号点云稀疏,而树冠冠层部分点云密度较高,此时计算得到该段点云模值位于植被冠层区域,也造成较大粗差,这种情况如图3所示。图3为从图1中截取的从5980m~6200m的点云数据,图中绿色点为利用文献[13]中统计分析方法提取出的点云,图中纵坐标显示范围仅包含了非噪声点云部分,且点云均放大显示。从图3中明显可以看出,这些被选出的点云虽然高程分布的聚集度较大,但并非地面点,而是树冠部分点云。而地面被树冠遮挡,获得的点云信息很少。
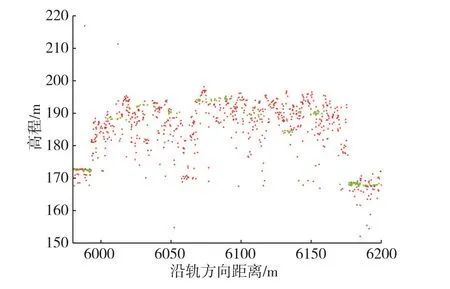
图3 使用统计分析方法提取的点云结果Fig.3 Point cloud extraction results using statistical analysis method
为解决上面提到的两个问题,本文针对点云初步去噪算法处理过的点云,使用统计分析的方法对点云进行滤波,提取地面点,并进一步剔除地面以下噪声点云。经过对点云的初步去噪,距离非噪声点云较远的点已被完全剔除,在提取地面点云时不会出现严重偏离实际值的情况。针对统计分析方法提取的植被冠层区域点云,考虑到地面以下距离地面较远的点云大部分已被剔除,本文采用以下方法进行判定:若某段点云的模与该段点云最低点高程差值大于经验阈值,认为该段提取点云为植被冠层区域点云,否则为地面点云。经验阈值根据初步去噪结果和平均树高进行选择,针对本文实验数据,经验阈值设置为8m。对于被提取点云判定为地面点云的分段点云,选取高程值与模差值绝对值最小的点作为该段点云的地面种子点;对于被提取点云判定为植被冠层点云的分段点云,对该段点云两侧分段点云的地面种子点进行插值,将距离插值点最近的点作为该段点云的地面种子点。得到整个数据段的地面种子点后,即可利用最小二乘局部曲线拟合方法[12]进行点云滤波。因此,本文点云滤波过程如下:
步骤1:在沿轨方向以一定大小的窗口将经过去噪处理的点云分段,并将点云的高程值四舍五入至整数米。
步骤2:计算窗口内点云数据高程值的模值和最低点的高程,并计算模值与窗口内最低点高程的差值。若差值小于经验阈值Δh, 则取窗口内与模值差值绝对值最小的点为该窗口内的地面种子点;若差值大于Δh, 则选取距离该窗口左右两侧窗口的地面种子点的连线垂直距离最近的点为该窗口内的地面种子点。
步骤3:对于每个窗口内的地面种子点,搜索在沿轨方向距离该点最近的9个种子点,以这10个点拟合二次曲线。
步骤4:设置自适应阈值[17]以区分地面点和非地面点

式(3)中,hmax为窗口内最高点高程;hmin为窗口内最低点高程;χ根据地形确定,一般设为0.1。计算窗口内每个点到步骤3得到的二次曲线在垂直方向的距离,若该距离小于或等于阈值,判定该点为地面点,否则判定为非地面点。
在对全部点云进行滤波处理后,点云可分为3部分,即:地面点云、植被冠层点云(地面点云之上的点云)和噪声点云(地面点云之下的点云)。因此,该滤波算法进一步剔除了部分噪声点云。获取地面点云后,即可进一步提取DEM,并与该区域传统激光雷达DEM数据进行对比。
2 数据处理与结果分析
2.1 点云初步去噪实验
按照上文提出的点云初步去噪算法对MABEL点云实验数据进行去噪处理,k设置为50,平均距离Di的频数直方图如图4所示。图4中对平均距离大于10m的频数缩小了纵坐标范围重新显示,以便于查看。由图4可以看出,点云平均距离主要集中在10m以内,且这个范围内频数随点云平均距离增加而减少,直方图峰值位置对应的平均距离为0.45m,最小平均距离为0.11m。因此,拟合Gauss函数均值为0.45m,标准差为0.34m。经验值t选取的原则为:使去噪结果中有尽量多的噪声点被剔除,而尽量多的非噪声点被保留。根据本文实验数据,经验值t取16时去噪效果较好,此时阈值为5.89m,初步去噪结果如图5所示。为了进行对比,本文使用文献[12]中的去噪算法对该数据进行了处理,k仍设置为50,拟合Gauss函数均值为3.15m,方差为2.58m,经验值t取5,去噪结果如图6所示。图5和图6中,绿色点云为提取的非噪声点。从图中可以看出,两种算法都较好地实现了噪声点与非噪声点的分离。还可以看出的是,图5中更多地面下噪声点被探测出来。实际上该数据共有点数51986个,图5中被分类为噪声的点数为1792个,图6中被分类为噪声的点数为1603个。

图4 各点平均距离频数直方图Fig.4 Frequency histogram of each point average distance
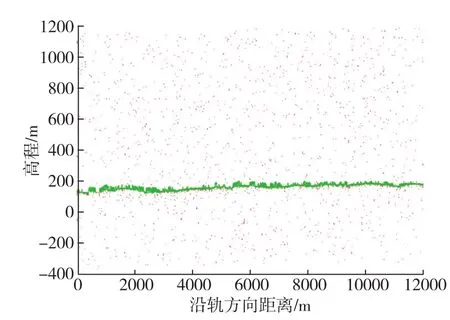
图5 本文算法初步去噪结果Fig.5 Preliminary de-noising results using the algorithm in this paper
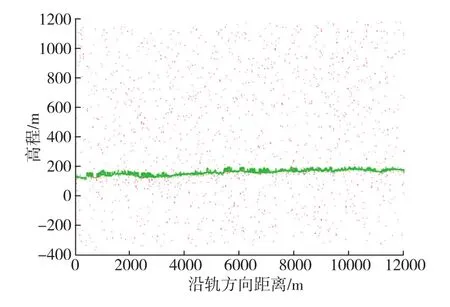
图6 文献[12]算法去噪结果Fig.6 De-noising results using the algorithm proposed by reference [12]
2.2 点云滤波处理实验
将点云初步去噪结果以20m大小的窗口进行分段,将每段窗口内点云高程值四舍五入后计算窗口内点云的模值,将窗口内与模值高程差绝对值最小的点作为候选地面种子点,图7显示了经2.1节初步去噪之后保留的点云结果与候选地面种子点分布情况。从候选地面点的沿轨方向的分布中依稀可以看出地面地形,但是其中有大量的植被点云被选取出来。如果直接利用这些点恢复地形,将造成很大误差。由图7还可以看出,真实地面一般都在高程最低点之上,若直接采用窗口内高程最低点作为地面种子点,同样会造成较大误差。为选取合适的地面种子点,本文计算模值与该窗口最低点高程的差值。当差值小于8m时,保留该点为地面种子点,否则剔除该点,并选择距离该点两侧窗口内地面种子点连线垂直距离最近的点为该窗口内的地面种子点。经过处理后,得到最终的地面种子点,如图8所示。由图8可以看出,虽然有少量地面种子点偏离真实地面,但是沿轨方向地面种子点的分布已经比较接近真实地面地形。
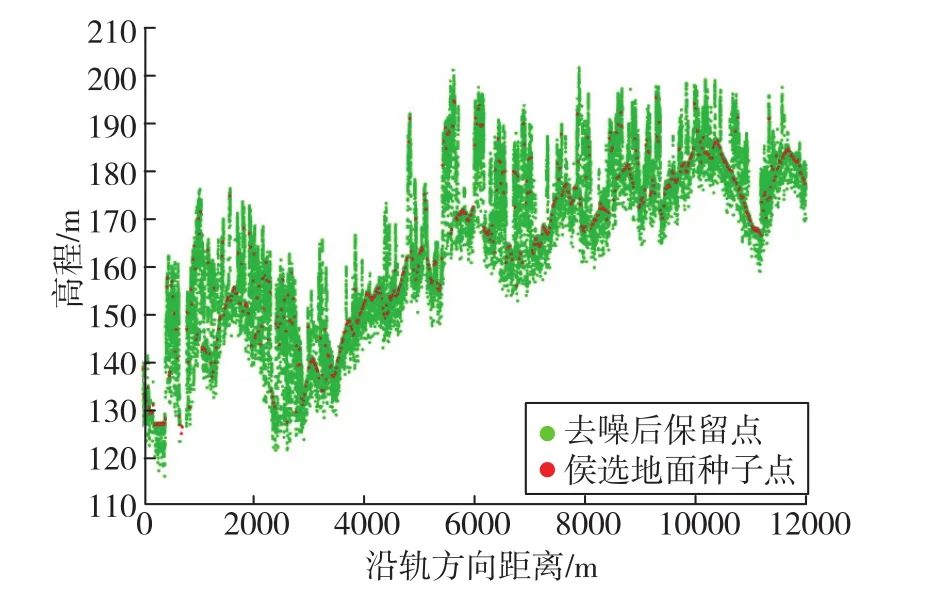
图7 初步去噪后保留的点云与候选地面种子点Fig.7 Remained point cloud and candidate ground seed points after preliminary de-noising

图8 初步去噪后保留的点云与地面种子点Fig.8 Remained point cloud and ground seed points after preliminary de-noising
为了进一步提取地面点云,本文联合与每个窗口地面种子点距离最近的9个地面种子点拟合二次曲线

式(4)中, (x, y)为地面种子点坐标,p1、p2、p3为拟合参数。本文选择较多的种子点来拟合二次曲线,这能减小偏离真实地面的种子点对真实地形的影响。对于窗口内每个点,计算x取该点横坐标时二次曲线函数值与该点高程的差值Δh, 将差值绝对值与由式(3)得到的自适应阈值T进行比较,当≤T时,判定该点为地面点;当Δh>0、>T时,则判定该点为植被点;当Δh<0、>T时,则判定该点为噪声点。照此方法对所有窗口内点云进行分类,结果如图9所示。滤波后,点云被分为植被、地面、噪声3类。其中,植被点为18988个,地面点为23421个,噪声点为7785个。从滤波结果可以看出,地面点、植被点和噪声点得到了较好的区分。
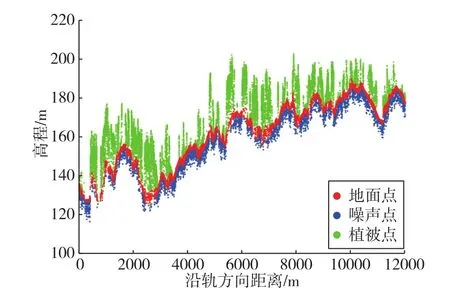
图9 滤波后的结果Fig.9 Diagram of filtered results
2.3 实验结果分析
(1)点云去噪结果分析
为了分析本文所采用的两种去噪算法之间的区别,分别从图5和图6中截取两段点云数据放大显示, 如图10所示。 其中, 图10(a)和图10(c)分别为截取自图5沿轨方向上600m~1800m、6000m~7200m的点云, 图10(b)和图10(d)分别为截取自图6沿轨方向上600m~1800m、6000m~7200m的点云。对比图10(a)和图 10(b)可以看出, 本文去噪算法和文献[12]去噪算法在植被以上区域剔除的噪声光子相同;而在地面点云和临近地面以下的点云,二者处理结果有较大差别。这些差别主要表现在两方面:1)文献[12]去噪算法中有一部分地面点云被误分类为噪声点,如沿轨方向680m~780m的裸地区域以及780m~1100m的被植被覆盖地面。这两类点的共同特征是分布比较稀疏,因此较难与非噪声点云进行区分。而本文去噪算法较好地将这些地面点正确提取出来,只有在740m处两个地面点被误判为噪声点。2)在临近地表以下区域的噪声点云中,本文算法识别了更多的噪声点。在图10(a)中,去噪后地表以下信号点距离地面最大距离约15m,而图10(b)中这个距离在8m以内。这非常有利于在下一步的滤波处理中设置较小阈值,以区分地面点云和植被点云。 图10(c)和图 10(d)除了在地面点云和临近地面以下点云处理结果上与图10(a)和图10(b)表现出一致的差别外,二者在植被以上的噪声光子上的表现也不尽相同。其中,图10(a)(本文算法)成功剔除了6622m和7175m处两个孤立的噪声点,而图10(b)结果中将其判断为非噪声点。

(a)截取自图5沿轨方向上600m~1800m的点云
(b)截取自图6沿轨方向上600m~1800m的点云
总体来讲,在整个数据处理结果中,文献[12]去噪算法将部分非噪声点云分类为噪声点,同时将部分噪声点分类为地面点,尤其是临近地面以下的噪声点,而这两种错误分类的情况在本文算法结果中都相对较少。例如,经人工判读方法简单统计,文献[12]算法的去噪结果将地面点分类为噪声点的个数为75个,而本文算法仅将6个地面点错误分类为噪声点。由于被错误分类为噪声点的地面点多处于点云稀疏的区域,这些点被剔除后相当于进一步抽稀了此处点云密度,甚至造成点云漏洞,这将会给下一步的滤波带来较大的误差。而临近地面以下噪声点的去除则对下一步滤波过程中的阈值设置非常重要,当最低点与实际地面高程差越小时,阈值设置越能有效将植被与地面分离。当高程差接近或达到树冠高度时,则很难找到合适的阈值,甚至导致滤波算法失效。因此,经过本文初步去噪处理,噪声点云和非噪声点云得到了较好的分离,同时为进一步的滤波提供了较好的实验条件。
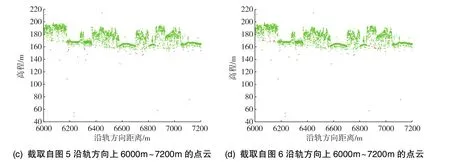
图10 截取的两段点云数据放大图Fig.10 Enlarged images of the two segmented point cloud data
(2)点云滤波结果分析
本文采用定量的方法分析滤波算法提取的地面点云数据质量,将实验结果与该区域采用传统激光雷达得到的DTM数据进行对比。由于所采用的DTM数据高程采用EGM96大地高,而MABEL点云高程为WGS84椭球高,因此需要对DTM进行数据转换,这可以利用美国大地测量局提供的高程转换工具[18]完成。对于滤波后地面点云中的每一点,本文利用双线性内插法计算对应该点平面坐标处的DTM高程,最终得到MABEL点云和对应DTM点高程在沿轨方向上的分布,如图11(a)所示。计算可得到MABEL地面点云相对于传统激光雷达高程的均方根误差RMSE为2.98m,相关系数R2为0.9938。如果对提取MABEL地面点云进一步规则化处理,可以得到线状DEM,将DEM分辨率设置为3m,并将三维点云二次曲面内插法简化为曲线形式,即采用二次曲线内插方法内插得到待求点高程,同样利用双线性内插法计算对应该点平面坐标处DTM高程,得到MABEL点云生成的DEM和对应DTM点高程在沿轨方向上的分布,如图12(a)所示。可计算得到MABEL点云生成的DEM相对于传统激光雷达高程的均方根误差RMSE为2.85m,相关系数R2为0.9931。MABEL点云生成的DEM与传统激光雷达相关性较MABEL原始地面点云更好,均方根误差也较小,这是由于在内插获得DEM时减弱了误差较大点的影响。在图 11(a)和图 12(a)中, 沿轨方向 8000m~10000m的部分区域没有数据,这是由于部分DTM数据缺失造成的(如图2所示)。在这两幅图中,也可以看出MABEL数据与DTM数据之间的高相关性。本文使用初步去噪后点云高程的最低点作为地面种子点进行滤波实验,得到MABEL点云、MABEL点云生成的DEM和对应DTM点高程在沿轨方向上分布,分别如图11(b)、 图 12(b)所示。 计算得到 MABEL地面点云、MABEL点云生成的DEM相对于传统激光雷达高程的均方根误差RMSE分别为6.50m和8.02m,相关系数R2分别为0.9728和0.9702。从图11(b)、 图12(b)中明显可以看出, 该方法提取的地面点云高程于传统激光雷达高程。而在本文滤波实验中,通过采用模值和窗口最低点高程的差值作为阈值,合理的确定了地面种子点,避免了选择地面以下噪声点作为地面种子点带来的较大误差。因此,利用本文统计分析滤波提取得到的DEM和DTM与传统采用高程最低点作为种子点得到的DEM和DTM相比更接近于参考数据。
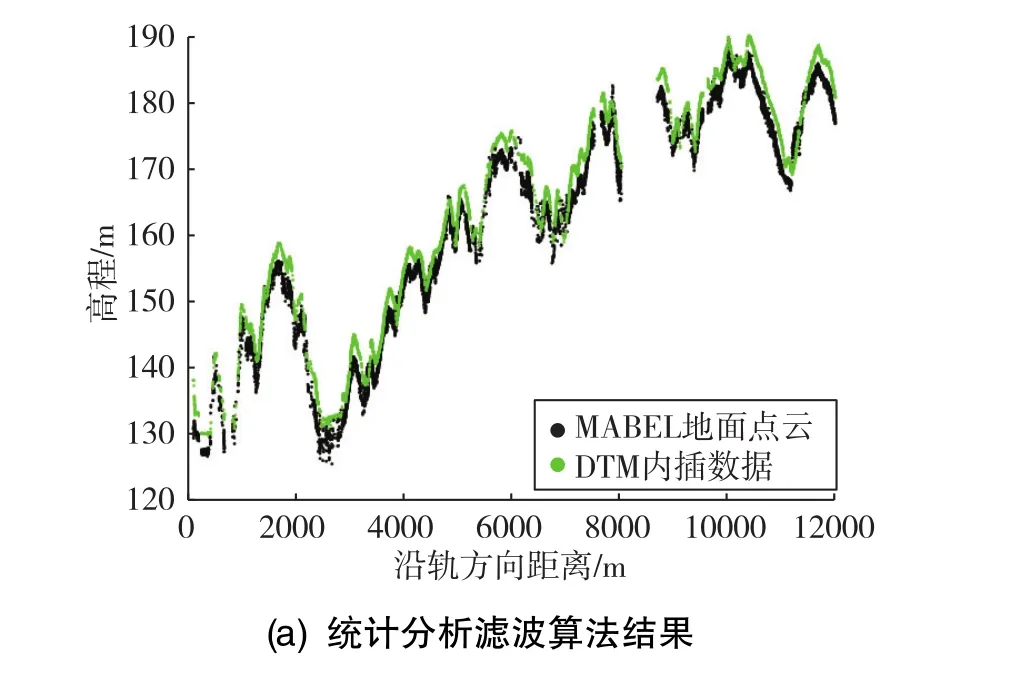

图11 MABEL地面点云与DTM内插数据对比Fig.11 Comparison between MABEL ground point cloud and DTM interpolation data

图12 MABEL地面点云生成DEM与DTM内插数据对比Fig.12 Comparison between DEM generated by MABEL ground point cloud and DTM interpolation data
3 结论
本文提出了改进的基于局部距离统计的点云去噪算法,利用完整的MABEL数据段进行实验,得到了较好的去噪效果。在MABEL数据去噪实验中,传统算法将部分非噪声点云分类为噪声点,同时将部分噪声点分类地面点,尤其是临近地面以下的噪声点,而这两种错误分类的情况在本文算法结果中都相对较少。传统算法去噪结果将地面点分类为噪声点的个数为75个,而本文算法仅将6个地面点错误分类为噪声点。点云初步去噪后,仍然存在较多的噪声信号,这可以通过滤波结果看出,临近地面以下噪声点占滤波前点云总数的比例达到15.5%。这些点也是传统的去噪方法难以剔除的,因此本文从初步去噪后的点云中利用统计分析方法提取地面点,间接的剔除地面以下噪声点,同时完成了点云分类。在滤波实验过程中,采用了一些经验值,这些数值的设置需要结合实验数据特点进行合理选择。最后,本文还利用传统激光雷达获取DTM验证了MABEL地面点云提取结果。实验结果显示,利用本文算法得到的MABEL地面点云相对于传统激光雷达高程的均方根误差RMSE为2.98m,相关系数R2为0.9938。MABEL点云生成的DEM相对于传统激光雷达高程的均方根误差RMSE为2.85m,相关系数R2为0.9931。使用初步去噪后点云高程的最低点作为地面种子点得到MABEL地面点云、MABEL点云生成的DEM相对于传统激光雷达高程的均方根误差RMSE分别为6.50m和8.02m,相关系数R2分别为0.9728和0.9702。对两种方法实验结果对比可以看出,利用本文统计分析滤波提取得到的DEM和DTM的精度优于传统采用高程最低点作为种子点得到的DEM和DTM。
本文主要关注MABEL数据中地面点云的提取与处理,虽然同时获得了植被区域的点云,但并未对其质量进行评价。这主要是由于植被附近区域点云分布状况复杂,一些与植被接近的噪声点由于点云分布较为分散,人工尚且无法准确判读。因此,植被区域点云噪声去除还需要进行更深入的研究。
猜你喜欢
绿色科技(2022年16期)2022-09-15
农业工程学报(2022年10期)2022-08-22
舰船电子工程(2022年6期)2022-08-02
军民两用技术与产品(2022年1期)2022-06-01
农业工程学报(2022年4期)2022-04-24
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
当代陕西(2020年23期)2021-01-07
计算机与网络(2020年19期)2020-12-04
消费导刊(2017年8期)2018-01-18
