水面靶标综合遥测遥控系统的设计与实现
2020-04-13 00:43王海涛刁世伦
指挥控制与仿真 2020年2期
王海涛,刁世伦
(中国人民解放军91550部队43分队,辽宁 大连 116023)
水面靶标[1]为反舰武器海上试验提供模拟舰船目标,靶标上的靶载测控设备完成海上实时位置、姿态等实时信息以及武器过靶段的观测、测量任务。随着新型反舰武器射程增加和过靶段速度的增大,试验危险区域相应增大,使得海上布靶点距离地面遥控站越来越远;随着靶标上观测和测量数据增加,特别是高清过靶视频的实时传输,通信容量的要求也越来越大,依靠现有遥控遥测设备,已无法满足远距离遥测遥控要求[2]。
以往靶载设备数量和种类较少,其遥控遥测功能均由各设备独立实现。随着靶载设备的发展,此方式带来很多弊端:重复研制和投资问题,试验损耗问题,靶载设备使用和维护问题,电磁兼容问题。建设一套水面靶标通用遥控遥测系统,完成水面靶标遥控遥测系统的集成化和标准化,是靶场信息化建设的必由之路。
1 系统组成与工作原理
1.1 系统组成
按照遥测遥控系统试验时各分系统安装的具体位置,主要包括地面站和靶载站两部分[3]。具体组成如附图1所示,下文中的靶载设备不包括在本系统中,是指其他安装在水面靶标上的脱靶量测量、过靶实况等其他现有测控装备。

图1 系统总体原理框图
1.1.1 遥测遥控靶载站
靶载站安装在水面靶标上,与地面站保持海上通视,工作时无人值守,其工作状态的设置由地面站遥控操管人员通过遥控操作。由于反舰武器不带战斗部,攻击靶标时高度可以设定,一般不会造成损失。靶载站由天馈分系统、靶载站遥测遥控基带、图像编码器、无线网桥、数传电台[4]、北斗用户机、IP语音电话、位置与航向测量装置、简易气象站和天线等组成。由于是通过电池组供电,试验开始时靶载站只有北斗用户机、数传电台和加电控制单元加电,北斗和数传电台均可执行遥控加电指令。天馈分系统完成遥控信号接收、发阻滤波、低噪声放大;对下行遥测信号功率放大并发射。
1.1.2 遥测遥控地面站
地面站为车载方舱式遥测遥控站,位于岸边海拔较高的遥控站点,主要由C频段天伺馈分系统、遥测分系统、遥控分系统、时频分系统、载车位置与航向测量装置、北斗分系统、图像分系统及软件组成。遥测基带和遥控基带采用软件无线电技术,将变频信道集成到基带设备中,提高系统集成度。地面遥测分系统由低噪声放大器、遥测下变频、遥测基带、遥测终端等组成;地面遥控分系统由靶载设备遥控终端、遥控指令采编、遥控基带、遥控上变频器、遥控发射机和小环接收机等组成[5]。
1.2 系统实现难点
1.2.1 海面信号传输多径衰落问题
系统完成地面站与海上靶载站之间远程无线通信,距离在50 km~80 km,上行遥控数据速率为96 kbps,下行遥测数据速率为10 Mbps。地面站的定向天线指向靶载站,始终处于0°~-1°。靶载站安装平台为船体,可作为固定靶或机动靶使用。由于海杂波以及多径反射波的环境下,采用传统的遥测遥控体制,比如上行链路采用L频段的PCM-DPSK-FM信号波形传输遥控指令[6],下行链路采用S频段PCM-FM信号波形,海面引起的多径衰落对遥测遥控的实现会有较大影响。
1.2.2 靶标多路异源数据接入与分发
靶载站接入的靶载设备,和地面站的靶载设备遥控终端之间的信息交互是本系统的关键所在。靶载设备的种类不同,研制厂家各异,导致靶载设备的遥测遥控软件与接口不统一。综合遥测遥控系统需要满足水面靶标上不同类型数据对双向传输的实时性、可靠性,同时具备通用性、可扩展性,在兼容原靶载设备遥测遥控软件的前提下,实现在地面站和靶载站之间的靶载设备即插即用。在应用中,靶载设备接口分为六类:RS232串口、RS422双工异步串口、IP语音接口、IP视频接口、IP数据接口和 PAL 制式视频接口。
2 系统实现关键技术
2.1 系统遥测遥控调制体制选择
由于系统为上行遥控和下行遥测不对称的传输链路,上行数据量较小,下行数据量较大,因此,上下行链路一般采用不同的调制体制。系统地面站天线工作始终在负仰角状态,海面的多径干扰对遥测遥控传输的影响最为严重。所以,系统上行遥控与下行遥测信道的传输体制应该采用有针对性的设计。
2.1.1 上行遥控信道
上行信道采用BPSK直接序列扩频技术[7],直扩中伪随机码尖锐的相关性使得多径衰落完全独立,当多径的传播时延大于伪码码元宽度时,直扩能够将多径影响作噪声处理;当多径的传播时延小于伪码码元宽度时,接收端才会发生轻度的衰落,只要合理选择码元宽度就能获得较好的抗多径效果。地面站遥控基带信息进行加密、信道编码、扩频等处理后采取BPSK调制,同时采用高效的纠错编码方式,以降低误指令概率和虚指令概率。
如图2所示,上行数据包含遥控数据、语音数据和链路数据。三类数据首先进行信源组帧,再经过信道编码、扩频调制后发射出去。

图2 上行信号流程
2.1.2 下行遥测信道
遥测下行高速信号传输抗多径选择的体制是OFDM技术[8]。无线通信中为了减少多径传输引起的信号失真,通常要求在传输过程中采取一定的技术措施,基于时域均衡的抗多径衰落技术虽然很成熟,但是用于宽带通信时存在一个严重弱点,那就是其复杂度和均衡系数精度的要求,随着多径时延扩展的增大而增大,很难达到理想目的。OFDM技术具有如下优点[9]:把高速的数据流通过串并转换降为低速数据,可以有效消除ISI(码间串扰)的影响;与普通调制系统相比,OFDM系统可以最大限度地利用频谱资源;可以有效抵抗频率选择性衰落和时间选择性衰落;OFDM符号的长度远大于单载波系统的符号长度,因此,比单载波具有更强的抗窄带干扰能力。在OFDM符号之间插入保护间隔,令保护间隔大于无线信道的最大时延扩展,这样就可以最大限度地消除由于多径而带来的符号间干扰(ISI)[10]。
靶载站下行数据包括语音数据、视频数据、靶载设备的测量和遥控回应数据、链路数据,在接口及协议管控分机中组帧为传输帧,经过OFDM调制后,在进行中频调制,最后上变频发射。图3为靶载站OFDM发射机原理框图,主要分为四个模块:编码调制、峰均比抑制、带外泄露抑制和多采样率信号处理。

图3 靶载站OFDM发射机原理框图

最后,在NCO控制下,按照所需的采样率通过ROM表中的插值滤波器对OFDM符号xw(n)进行插值滤波,得到采样率等于数模转换工作时钟的高速数据xu(m),经过D/A转换后得到OFDM发射机基带信号x(t)。
由于OFDM体制对于多普勒偏移敏感,不具备自跟踪功能,通过两种解决方案:靶载站包括1台北斗/GPS航向位置装置,分别通过北斗和微波信道,传送到地面站,引导地面站天线始终指向船体;或者在下行遥测体制保留FM和QPSK体制,作为备份,应用在机动靶场合。
2.2 靶标多路异源数据接入与分发解决方案
靶载站接入的靶载设备,和地面站的靶载设备遥控终端之间的信息交互是本系统的关键所在,系统需要满足水面靶标上不同类型数据对双向传输的实时性、可靠性,同时具备通用性、可扩展性,实现在地面站和靶载站之间的靶载设备即插即用。
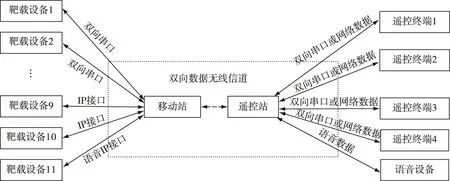
图4 地面站和靶载站之间无线通信等效工作模式
2.2.1 靶载设备遥控分发与遥测采编
在应用中,靶载设备接口分为三类:RS422双工异步串口、IP网络接口(包括视频和音频)和 PAL 制式视频接口。
靶载站内部信息交互以靶载局域网[11]为中心,接收综合遥测遥控基带输出的来自地面站的上行数据帧,经载波捕获跟踪及解扩和载波锁相解调送出遥控信息,经解调、指令判决等处理后输出数据流,按照复接表进行解复接操作之后,根据IP地址的不同分别通过对应的端口发到相应的靶载设备[12]。同时接收靶载协议模块采集的各种来自靶载设备需要下传的遥控回应数据,按照下行数据帧的格式定义进行复接之后,发送给遥测发射机进行调制发送。
靶载站下行遥测借鉴弹上采编器实现技术,将多路来自靶载设备的数据插入遥测帧后发射,经地面站接收、解调、挑路后还原为各个靶载设备的原始数据,其中,视频数据经网络送入图像解压单元进行解压缩,并输出显示;网络数据经交换机送给对应的靶载设备遥控终端;串口数据则通过接口处理模块形成的虚拟串口服务器转发至对应的靶载设备遥控终端,供各个靶载设备的遥控软件使用。
遥测帧协议。下行传输的遥测数据包含链路管理数据、靶标GPS与航向数据、气象站数据、语音数据、靶载设备遥控回应数据、靶载设备测量与视频数据等。下行传输链路管理数据长度固定为8个字节,为了保证不同模式下链路管理数据的兼容和统一,对下行链路管理数据采取固定复接方式,即下行链路管理数据固定复接于链路层报头。遥测信息包含多种靶载设备数据,不同靶载设备数据的速率相差很大,考虑到复接效率和不同用户端口间速率的差异,复接采用基于固定复接单元长度的动态复接方案。因此,链路层之上的格式层需完成用户数据分段/重组和适配的操作,即通过应用层传下来的数据在格式层拆成固定长度的数据帧,并按照数据来源将数据封装成不同的格式。
在帧格式设计时,设计多个短复接单元以及多个长复接单元,其中,短复接单元用于传输数据包较短、数据量少、实时性要求高的语音数据、遥控回应数据、靶位航向和气象站输出数据等;长复接单元用于传输数据包长、数据量大的靶载设备视频和测量信息。
2.2.2 地面站遥测分发与遥控采编
系统地面站内部信息交互以地面站局域网为中心,控制终端采集各种需要上传的数据,按照上行数据帧的格式定义进行复接操作之后,生成上行数据帧发送给遥控基带进行调制发送;同时,接收遥测基带输出的下行数据帧,按照复接表解复接之后,根据数据类型的不同分别通过对应的IP地址发到相应的处理设备。
地面站上行遥控,是来自遥控终端上执行的靶载设备遥控软件的遥控指令,经虚拟串口送至遥控基带组合,和其他控制软件的指令一起组帧、调制后发射,经靶载站的遥控接收机接收、解调并挑路还原为串口数据,经对应的串口输出至靶载设备。为保证系统使用的灵活性,采用了虚拟串口服务器技术,保证所有 4 台靶载设备遥控终端上均可运行任意靶载设备的现有遥控软件,即通过遥测遥控地面站和遥测遥控靶载站,所有靶载设备的串行数据接口都映射到了每台靶载设备遥控终端上,极大增加了使用的灵活性和便利性。网络接口则通过直接端口映射进行上下行数据的交互。
遥控帧协议。上行传输的数据包含链路管理数据和上行用户数据,其中,上行用户数据可能包含靶载遥控数据和语音数据。上行链路管理数据长度固定为8个字节,对上行链路管理数据采取固定复接方式,即上行链路管理数据固定复接于报头中。由于上行数据速率较低,且不同上行用户数据的更新频率不同,数据长度不同,为了尽可能提高传输效率,用户数据采用动态复接方案,该模式下数据区包含的用户数据的类型以及用户数据包的长度全部不固定,需要通过报头中的复接表来判别数据区中包含的数据的类型和各种类型数据的数据包长度,由于通过复接表既可完成对数据的判别处理,与下行复接帧不同,不需要设计专门的格式层头,可以提高传输效率。
2.3 链路计算结果
在C频段带宽10 M的情况下,地面站为1.8 m抛物面高增益天线,表1给出遥测遥控链路的计算结果[13],都有大于18 dB的储备裕量。

表1 遥测遥控无线链路电平计算
3 结束语
本文综合遥测遥控系统对地面站和靶载站进行针对性的设计实现,在陆地与海面目标之间利用C频段的微波链路在上行遥控信道采用BPSK直接序列扩频和下行遥测信道选择OFDM正交频分复用技术,在靶载站与地面站两个异地局域网之间完成遥测遥控视频、语音和测量数据的交互,解决了海上远距离大容量靶载设备多路异源数据在靶载站接入与地面站分发难题。系统在10 M码率下作用距离可达到80 km以上,已应用于反舰武器系统海上试验,结果表明性能指标达到了预期目的,具有良好的推广应用前景。
猜你喜欢
今日农业(2022年4期)2022-11-16
火力与指挥控制(2022年3期)2022-04-27
计算机测量与控制(2021年9期)2021-10-08
军民两用技术与产品(2021年10期)2021-03-16
探测与控制学报(2020年5期)2020-11-05
弹箭与制导学报(2020年2期)2020-09-01
计算机测量与控制(2020年3期)2020-04-07
中国电子报(2019年55期)2019-10-24
电脑报(2019年8期)2019-09-10
通信产业报(2019年26期)2019-08-30