双站紧凑型地波雷达海上目标航迹融合探测*
2020-04-13 00:52:50纪永刚杨启松王祎鸣于长军孙伟峰
指挥控制与仿真 2020年2期
纪永刚,张 杰,杨启松,王祎鸣,于长军,孙伟峰
(1.自然资源部第一海洋研究所,山东 青岛 266061;2. 哈尔滨工业大学(威海),山东 威海 264209; 3. 中国石油大学(华东),山东 青岛 266580)
高频地波雷达是海上船只目标大范围连续跟踪监测的主要手段,可超视距探测海上目标,实时给出目标运动航迹[1-3]。相对于大型阵列式雷达,小阵列的紧凑型地波雷达占用场地小、功耗低,可以节省稀缺的海岸资源,因此,更容易推广应用。但紧凑型地波雷达由于天线孔径减小和天线小型化等原因,目标测向和跟踪性能降低,难以实现目标的精确定位。为减少高频地波雷达的阵列尺寸,提高紧凑型地波雷达探测性能,国内外开展了MIMO、分布式等新体制地波雷达及天线小型化方面研究[4-7]以及发展适合于紧凑型地波雷达的检测跟踪一体化方法[8-9],提高单站紧凑型地波雷达的航迹跟踪性能。且国内外多个研究单位利用便携式紧凑型地波雷达开展了目标探测研究[10-16]。
利用多站提供的多方位目标观测,可以克服单站单一观测方位上目标跟踪中的目标航迹缺失或断裂问题,而且还可以通过融合多方位的目标探测信息提高紧凑型地波雷达目标空间定位精度。目前,国内外开展的多站(每个站可获取一个观测方位信息)地波雷达目标融合探测[17-20],多采用检测级的点迹融合,再利用融合点迹形成航迹,且相关研究主要是针对大型阵列式地波雷达。对于小阵列紧凑型地波雷达,弱信号的检测困难会增大目标的虚警率和漏检率,难以给出有效可靠的点迹结果,而且较低的点迹测向精度增加了多方位点迹的关联难度,即难以判别不同方位探测的目标结果是否为同一目标,甚至出现错误关联的情况,致使无法做到有效的多方位信息融合。相对于点迹关联,双站航迹关联是在单站航迹跟踪处理后,可减少单个时刻点迹错误关联的概率,充分利用多时刻的目标信息,因此,多方位的航迹融合关联和融合处理更具可靠性。近几年,基于航迹关联和融合已开展相关研究[21-23],主要开展了仿真分析,还未有实测数据的验证。
1 双站地波雷达目标航迹关联方法
1.1 地波雷达探测目标航迹模型

(1)

1.2 地波雷达目标航迹全局最优关联方法
为实现双站地波雷达目标航迹融合探测,首先,需要实现两个站点目标航迹的关联。雷达站1的某一条目标航迹可能与雷达站2的多条航迹关联,反之亦然。为实现双站地波雷达目标航迹的全局最优关联,本文将拍卖算法引入双站地波雷达目标航迹关联中,下面是基于序贯相似度双站航迹与航迹关联步骤。
步骤1:双站航迹粗关联,即利用两个站点的航迹数据,利用公式(2)得到两个雷达站的航迹的可关联航迹集。
(2)
上式表示雷达站1第i条航迹与雷达站2第j条航迹中的目标点迹沿x轴和y轴方向满足的粗关联准则,其中R为雷达站1与雷达站2沿x轴和y轴方向的定位误差,与目标在两个雷达站中所在空间位置的空间几何定位精度有关,mi为在某一概率下的关联门限值。在双站航迹粗关联处理中,依次遍历所有航迹,当它们满足粗关联准则时,相关结果均放入关联航迹集中。


(3)

步骤3:构建相同时刻点迹的相似度关联矩阵,然后利用拍卖算法等全局最优关联方法,实现对相同时刻双站雷达航迹中点迹的关联,确定它们的关联结果。
步骤4:基于步骤3得到的多个时刻点迹最优关联结果,构建雷达站1与雷达站2目标航迹之间的序贯相似度关联矩阵Se,即
(4)
其中,cij为某一时刻雷达站1第i条航迹与雷达站2第j条航迹之间的序贯相似度。其计算公式为

(5)

步骤5:再次利用拍卖算法等全局最优算法,得到双站地波雷达目标航迹的关联结果。
步骤6:采用两个站点关联的航迹,利用公式(6)进行相同时刻点迹的融合处理,最终得到双站融合后的点迹。

(6)

2 航迹关联方法仿真分析
本文采用我国渤、黄海海域的实测AIS数据仿真地波雷达目标航迹,时间在2019年4月29日,目标航迹范围为120.4°~122.3°和37.6°~38.8°,目标航迹最长长度为150 min,航迹数量为138条。两个雷达站位置分别在烟台和威海。AIS船只航迹及雷达站位置如图1所示。

图1 AIS船只航迹分布图
假设两个雷达的目标探测精度相同,利用AIS数据仿真紧凑型地波雷达目标跟踪航迹的条件:目标径向距离测量误差标准差为±1.0 km,测向误差标准差为±3°,径向速度测量标准差为±0.7 km/h。上述选用的误差都是基于实测地波雷达目标探测精度统计出来的。基于实测AIS数据可先得到增加了各种误差后的目标航迹,再采用UKF方法对每条目标航迹做滤波处理,给出仿真地波雷达目标航迹跟踪结果,结果分别见图2和图3。其中,蓝色表示站点1的目标航迹,红色表示站点2的目标航迹,绿色为AIS航迹。

图2 滤波前目标航迹仿真结果

图3 滤波后目标航迹仿真结果
基于滤波后的两个站点地波雷达目标航迹结果,利用本文提出的双站地波雷达航迹关联和融合方法,得到双站航迹关联结果,见图4所示。

图4 双站航迹关联结果
作为比较,文中给出了基于航迹中某一时刻点迹信息的双站目标关联结果,见图5。图6是在不同时刻目标航迹和点迹关联概率统计结果。

图5 双站目标点迹关联结果
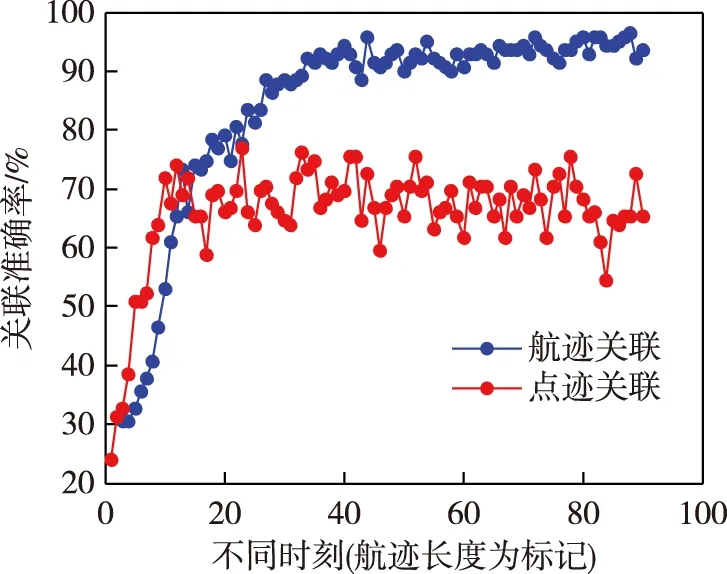
图6 不同时刻目标航迹和点迹关联概率统计
从图6可以看出,从第25个时刻开始,基于航迹的双站地波雷达目标关联概率可达90%以上,而基于点迹信息的关联概率大部分在70%左右。需要说明的是,本文基于双站点迹关联中使用的点迹是选用目标航迹中某一时刻的点迹信息,而不是直接采用实际地波雷达的点迹检测结果。航迹中的目标点迹,经过了航迹跟踪处理过程,大部分虚假的点迹已经被剔除,仅保留了已被判别为真实船只目标的信息。因此,如果直接采用地波雷达目标的点迹信息,则双站目标的关联概率会明显降低,效果更差。
基于双站地波雷达航迹关联结果,图7给出了双站地波雷达目标航迹融合结果。图8给出了图7中红框位置的具体目标航迹及融合前两个站点的关联航迹。
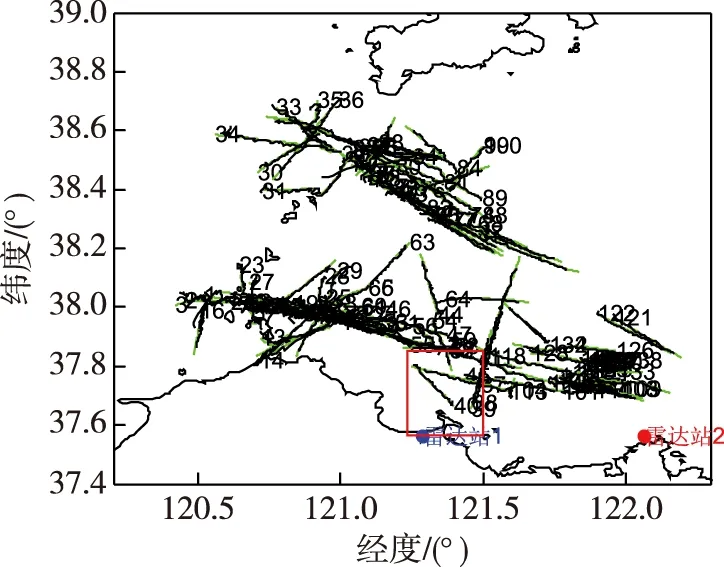
图7 双站地波雷达目标航迹融合结果

图8 目标航迹融合结果个例

图9 目标航迹个例融合前的结果
可以看出,基于关联结果得到的融合后航迹与原始的AIS信息基本一致,定位精度误差较融合前两个站点的航迹有明显改善。通过双站地波雷达目标航迹的关联和融合处理,提高了紧凑型地波雷达的目标定位精度。
3 实测数据验证和分析
实测实验数据采用项目研究团队在2019年1月的双站地波雷达目标探测实验数据。实验地波雷达系统采用研制的双站小阵列紧凑型地波雷达,发射机最大发射功率是500 W;接收站5阵元。两部雷达分别布放在烟台和威海,其具体位置及目标航迹探测结果分别见图10和图11。

图10 站点1的目标航迹结果

图11 站点2的目标航迹结果
基于本文提出的双站地波雷达目标航迹关联和融合处理方法,图12给出了部分与AIS同步的关联和融合处理结果。其中蓝色表示站1航迹结果,黑色为站点2,红色为融合后结果,绿色为同步的AIS结果。
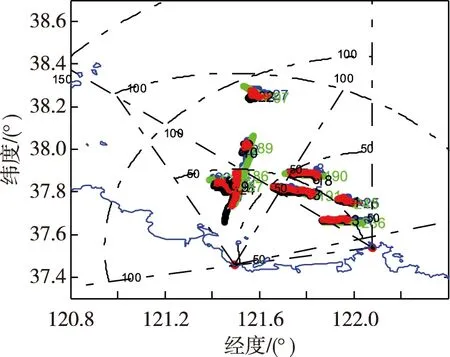
图12 双站航迹关联与融合结果
图13和图14给出了两个目标船只个例的结果以及关联前和融合处理后目标航迹中点迹与同步AIS的距离误差统计分布。其中,第一个目标距站点1的距离大约在40 km,距站点2的距离大约70 km,实测AIS航迹位于两个站航迹的中间,双站融合结果与同步AIS的距离误差大部分小于2 km,小于融合前两个站的误差。第二个目标点距站点1的距离大约在45 km,距站点2的距离大约20 km。但与第一个目标明显不同的是,此时两站测量航迹都在真实AIS航迹同一侧,此时双站融合航迹误差介于两站航迹的中间。出现此类情况,其主要原因是两个雷达站存在的系统误差不同,因而对同一个目标的测向误差不同导致的。图15给出了目标1的船只的照片,此船为货船,MMSI为414163000,呼号BFAY7,船长225 m,船宽32 m。

图13 两个船只目标的航迹关联和融合结果

图14 两个船只目标的融合前后的误差统计

图15 船只目标照片
图16给出了所有两个站点关联和融合航迹的误差统计结果,包括误差平均值和标准差的统计结果。可以看出,融合后航迹的误差平均值大部分小于两个站点的误差,而融合后航迹的标准差介于两个站点航迹的误差之间。

图16 所有目标的误差统计结果
需要说明的是,图13所示的基于实测地波雷达数据的融合航迹结果,与图8所示的仿真结果的融合航迹结果还有一定的差别。由于两个站点的雷达系统所处位置及周边环境不同,导致两个雷达系统对目标的探测精度等会存在不同程度的差别,因此,会导致基于实测数据的双站融合结果误差更大一些。
4 结束语
本文开展了基于航迹信息的双站紧凑型目标关联和融合方法研究,提出了基于序贯相似度的双站紧凑型地波雷达目标航迹最优化关联方法。通过仿真分析表明,对于测向精度较低的紧凑型地波雷达,双站目标航迹关联概率可达90%以上,明显优于基于点迹信息的关联结果,通过双站关联后融合结果的误差也低于两个站点融合前的误差。最后,利用2019年开展的双站紧凑型地波雷达的实际探测数据对本文方法进行了验证,给出了双站关联和融合结果的误差分析。
需要说明的是,目前论文重点介绍了双站航迹关联方法,初步给出了双站融合结果。文中对于双站融合处理及分析还不深入,实际上单站的航迹跟踪结果以及两个站点存在的系统误差的差异都会影响双站关联航迹的融合结果。此外,目前分析的双站都是T/R体制的,两个站点的航迹跟踪、双站关联和融合基本一致,而T/R-R体制的地波雷达相对于T/R-T/R的双站关联,需要进一步分析T-R双基地的跟踪及与T/R站的关联和融合方法,我们将在以后的工作中深入研究。
猜你喜欢
中学物理·高中(2021年3期)2021-06-06 07:25:18
青年歌声(2019年12期)2019-12-17 06:32:32
电子制作(2019年14期)2019-08-20 05:43:42
火控雷达技术(2019年1期)2019-04-11 06:35:00
国际呼吸杂志(2019年1期)2019-01-28 09:37:02
电子技术与软件工程(2018年9期)2018-02-25 06:21:08
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
中国科技博览(2017年31期)2017-09-20 07:56:08
中国自行车(2017年1期)2017-04-16 02:53:52
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52