基于发现概率的多平台反潜鱼雷协同火控研究
2020-04-13 00:53:42王洋洋
指挥控制与仿真 2020年2期
吕 荧,王洋洋
(1. 海装广州局,广东广州 510000 2. 江苏自动化研究所,江苏连云港 222061)
在未来可能发生的海上战争中,水面舰艇编队将成为海军执行作战任务的重要打击力量。由于潜艇的隐蔽性和海洋环境条件的复杂性,敌潜艇将成为舰艇编队最大的威胁,反潜战将贯穿于战争的全过程[1-3]。因此将编队内各反潜平台和反潜武器综合为一体,协同多个平台上的多种水声传感器搜索敌潜艇、协同多种反潜武器对敌潜艇进行攻击,才能满足舰艇编队的安全需要[4-5]。
反潜鱼雷作为目前最为重要的反潜武器,广泛部署于多型舰艇、潜艇、反潜直升机上,包括管装鱼雷、助飞鱼雷、空投鱼雷等。新能源和新技术的发展虽明显改善了鱼雷的性能,但是攻潜效果并非令人满意,主要体现在发现概率低上。发现概率低一是因为海洋环境的复杂性导致水声传感器的探测误差较大,二是因为现在的攻潜形式多为单平台单武器攻击,很难达到一击制胜的效果。更重要的是,现代技术已经可以分析发射鱼雷时的噪声声谱,在接收到特征信号时潜艇目标发生了临时机动,这就导致了更低的发现概率。
本文结合水声换能器探测误差以及潜艇自身机动性,分析各型反潜鱼雷的搜索特性,基于发现概率建立多平台反潜鱼雷火力覆盖模型[6],并以多平台反潜鱼雷火力覆盖模型为核心引出多平台反潜鱼雷协同火控的概念。
1 多平台反潜鱼雷火力覆盖模型建立
1.1 换能器探测误差与潜艇机动性分析
舰艇等装备的水声换能器包括舰壳声呐、拖曳声呐等,声呐的性能各有不同但都有探测误差,未来的战场中将通过多个平台的目标信息融合实现探测精度的提高,探测能力最终也将体现在测向和测距误差上。如图1所示,α为测向误差,Δ为测距误差,此处暂不考虑误差的二阶原点距分布。当α很小时,两条测向误差线和测距误差线近似平行,因此,目标存在区域近似为一个长方形,宽a和长b可由探测距离D结合测向误差、测距误差计算得出,如图2,因此目标存在区域的面积为

(1)
由于现代技术已经可以分析发射鱼雷时的噪声声谱,目标在接收到特征信号时将发生临时机动,这种机动将有利于躲避来袭鱼雷,但存在方向、速度的任意性。不论是管装鱼雷还是助飞鱼雷都将在行进过程中消耗时间,这就使得目标的存在范围在探测误差长方形的基础上进一步扩大,形成一个圆角半径为r的圆角矩形,如图2,其中M′为发射时刻目标探测点,C为目标解算航向,M点为目标真实点进行随机机动,圆角半径r可根据鱼雷行进时间计算得出,假定鱼雷航行速度为v,潜艇速度为v潜,则r=v潜D/V。目标存在区域的面积拓展为
S目标=πr2+a·b+2(a+b)·r=πr2+
(2)

图1 换能器探测误差示意图

图2 目标存在圆角矩形区域
1.2 管装鱼雷搜索特性建模
对于近距离的目标一般采用管装鱼雷进行打击,管装鱼雷在行进至设定位置转角之后开启自导装置进入直航搜索阶段,一旦目标进入搜索扇面即能发现、跟踪并追击目标。当进入目标存在区域,管装鱼雷的搜索覆盖面为搜索扇面扫过的长矩形,如图3所示,矩形宽d由搜索扇面开角和作用距离可以求出,即d=2m·sinθ,切入目标存在区域的位置点和航行方向成为影响覆盖面积的关键,本文中不考虑鱼雷的航行误差。管装鱼雷搜索发现概率可表示为
(3)

图3 管装鱼雷搜索发现概率示意图

图4 助飞鱼雷搜索发现概率示意图
1.3 助飞鱼雷搜索特性建模
对于远距离的目标采用助飞鱼雷进行打击,助飞鱼雷在入水后进行设定方式的自导搜索,一旦目标进入搜索扇面即能发现、跟踪并追击目标,本文假定助飞鱼雷入水后进行360°环搜,搜索扇面形成一个半径为R的圆,即S助=πR2。如图4所示,助飞鱼雷的入水点成为影响覆盖面积的关键因素。空投鱼雷与助飞鱼雷相似,助飞鱼雷搜索发现概率可表示为

(4)
1.4 多平台反潜鱼雷火力覆盖模型
根据上述两型鱼雷的发现概率建模可以发现,单枚鱼雷的发现概率低,很难满足作战需求,需要集合多平台多种反潜鱼雷对潜施行火力覆盖,方能达到较高的发现概率,这也恰好是未来战场的作战需求。但是,对潜的火力覆盖与反舰的火力覆盖相差甚多。一方面是因为鱼雷本身价格昂贵无法像炮弹密集发射;另一方面是反潜鱼雷的自导装置间将会产生声信号干扰,出现生成虚假目标和形成鱼雷间互导的严重现象,无法完成作战任务。
多平台反潜鱼雷火力覆盖模型建立在反潜鱼雷同时到达目标圆角矩形上,结合多平台反潜鱼雷资源,避免各型鱼雷间的声信号干扰,通过遗传算法将鱼雷搜索区域合理分布在目标圆角矩形上,实现发现概率最大化,如图5所示,i、j分别为发射管装和助飞鱼雷的枚数,此时的发现概率为
(5)

图5 多平台反潜鱼雷火力覆盖模型示意图
2 实验仿真与分析
在一场反潜战中,我方舰艇A探测发现约D1=8 km处有敌潜艇信号出现,此时舰艇B距离目标约D2=20 km,舰艇A传感器探测误差为测距误差Δ=5%D,侧向误差α=5°。假定管装鱼雷速度为50 kn,自导搜索扇面开角为θ=60°,搜索距离为1 km,助飞鱼雷的飞行速度为200 m/s,入水搜索面半径为1 km,如图6所示。
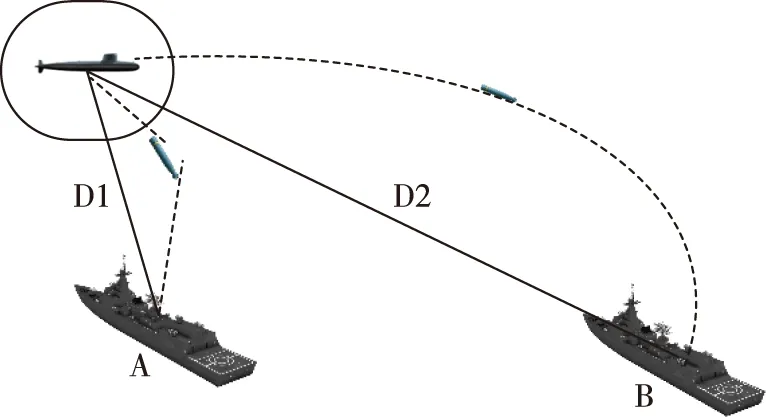
图6 典型仿真态势示意图
分别对管装鱼雷、助飞鱼雷、管装鱼雷+助飞鱼雷(不考虑信号干扰及多平台反潜鱼雷火力覆盖模型)以及管装鱼雷+助飞鱼雷(考虑多平台反潜鱼雷火力覆盖模型)的最大发现概率进行仿真,仿真结果如表1所示。

表1 各型鱼雷发现概率
通过仿真结果可以发现,考虑多平台反潜鱼雷火力覆盖模型的搜潜发现概率明显高于不考虑多平台反潜鱼雷火力覆盖模型的搜潜发现概率,在现实战场中,多平台反潜鱼雷火力覆盖模型的优势将更加明显,不但排除了互扰现象的发生,更是把目标所能容身之所全面活力覆盖,使得反潜鱼雷的总的发现概率近乎100%。
2.1 圆角矩形r的选取
目标存在圆角矩形的圆角半径r的取值与反潜鱼雷到达目标探测点的时间T正相关。对于管装鱼雷来说,航行时间即为鱼雷入水后航行至探测点的时间,对于助飞鱼雷来说,航行时间即为鱼雷发射后飞行至落水点的时间。当多平台协同发射多型反潜鱼雷时,根据各平台距目标点距离以及使用鱼雷类型,求取i枚鱼雷的航行时间Ti,比较并提取出最小的航行时间,作为计算圆角半径r的输入,即
r∝min{T1,T2,T3…Ti}
(6)
2.2 鱼雷覆盖面积的修正
多平台反潜鱼雷火力覆盖模型旨在避免各型鱼雷间的互扰并最大化发现概率,在现实战场中,鱼雷的搜索方式可由人为进行控制,特别是助飞鱼雷,发射前可设置入水搜索方式,航行过程中可进行指令修正。通过搜索方式设定以及鱼雷路径预先推演,可以允许反潜鱼雷搜索面进行覆盖,只需满足鱼雷自导扇面之间不发生交叠。搜索面积的覆盖不会降低发现概率,反而会增大发现概率,如图7,S重叠可由鱼雷路径预先推演得出,此时的发现概率为
(7)

图7 覆盖面积修正对比图
3 多平台反潜鱼雷协同火控
为了适应协同反潜作战的需求,必须将战场上广泛分布的反潜火控系统进行有机融合,使之具备协同对潜火力打击能力。多平台反潜鱼雷协同火控是为支持分布式网络化作战这种新的作战样式而诞生的一种新型火控系统形式,对现役反潜鱼雷火控系统进行综合集成,实现目标信息与火控信息的共享和及时准确的协调与控制,形成强大的火力层面的互操作能力,有效支持协同反潜火力打击。
多平台反潜鱼雷协同火控在交战前即做好基础准备工作,将参战各平台传感器及鱼雷性能参数集中设定到系统中,成为火控解算的已知参数。在协同反潜作战中,火控系统接收综合态势,一旦某个平台传感器探测到敌潜艇目标,即将目标信息实时共享。火控系统接收目标数据,根据平台占位确定反潜作战平台及反潜鱼雷类型,计算目标存在圆角矩形区,并根据火力覆盖模型进行解算,将反潜鱼雷射击诸元输出各对应反潜平台,反潜平台按照指令进行机动和武器发射,完成反潜作战,流程如图8。
与常规反潜流程不同的是,多平台反潜鱼雷协同火控减少了目标运动要素解算的模块,解算基于目标的当前点数据,这是因为在计算圆角矩形参数时已将传感器的探测误差区域完全覆盖。减少了目标运动要素解算模块大大缩短了攻潜武器射击诸元的时间,可以达到先敌发现、先敌攻击、先机制敌的效果。

图8 多平台反潜鱼雷协同火控作战流程图
4 结束语
本文讨论了各型反潜鱼雷的搜索特性,在分析了目标潜艇可能存在的圆角矩形后基于发现概率建立多平台反潜鱼雷火力覆盖模型,该模型避免了反潜鱼雷间的声信号干扰,通过将反潜鱼雷搜索覆盖能力合理分布在目标威胁区实现发现概率最优化。通过典型态势仿真验证发现该模型在对潜发现概率上具有明显优势,并对模型进行了参数分析和优化。最后以多平台反潜鱼雷火力覆盖模型为核心引出多平台反潜鱼雷协同火控的概念,为协同反潜作战提供了理论支持。
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
电子技术与软件工程(2021年8期)2021-06-16 06:30:58
装备制造技术(2020年1期)2020-12-25 05:18:50
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
制造技术与机床(2019年6期)2019-06-25 10:17:18
制造技术与机床(2017年7期)2018-01-19 02:29:50