自主水下航行器导航技术发展现状与分析
2020-04-13 08:46张世童张宏伟王延辉张玉鹏谢阳光
导航定位学报 2020年2期
张世童,张宏伟,王延辉,张玉鹏,谢阳光
自主水下航行器导航技术发展现状与分析
张世童1,张宏伟1,王延辉1,张玉鹏1,谢阳光2
(1. 天津大学 机械工程学院,天津 300072;2.中航工业西安飞行自动控制研究所,西安 710065)
自主水下航行器(AUV)是海洋观测与探测的重要技术装备。当前AUV水下导航技术面临实时性差、信息源少、干扰多等瓶颈问题,成为世界发达国家海洋科学技术的前沿研究领域。对AUV前沿导航技术发展现状进行了系统总结,重点分析了水下导航的研究热点并提出主流导航系统及关键技术。在此基础上,从无辅助的单一惯性导航、组合导航及协同导航3个维度总结各自导航方式的技术特点,并分析了AUV导航技术的发展趋势。
自主水下航行器;导航技术;辅助水下导航;组合导航;协同导航
0 引言
近年来,随着微电子、人工智能和新兴量子导航等技术的快速发展,极大地推动了海洋技术前沿领域相关技术的进步,无人水下航行器技术已经成为各海洋强国争先发展的重点领域。
2017年,美国国防高级探究计划局称计划开发深海定位导航系统,该系统能够为各种载有该移动工作端的水下目标提供实时、连续、稳点以及精确的导航信息。自主水下航行器(autonomous underwater vehicle, AUV)具有活动范围大、机动性强、智能化程度高等优点,在海洋调查、海洋资源勘探、水下搜救、潜水支援、军事侦探等领域有重大利用价值。当前,导航问题是AUV所面临的关键挑战之一,由于受到海水介质物理特性的限制和海洋环境条件的影响,水下导航技术面临可用信息源少、水下干扰多、惯性传感器精度难以提升技术难题一直没有被很好地解决。近些年,随着激光陀螺仪、光纤陀螺仪和小型化及数字化多普勒测速仪(acoustic Doppler velocity log,DVL)的出现,大幅度提高了运动速度和航向的测量精度,为AUV组合导航系统的构建提供了关键配套技术和器件。当前,我国惯性导航技术和国外有很大差距,主要体现在惯性系统总体精度和功能特性,惯性传感器精度,组合滤波算法等方面,在协同导航领域还处于跟跑状态。
陀螺仪的精度对惯性导航的精度起着决定性的作用,近几年新兴起来的基于超冷原子的量子导航技术可使陀螺仪的精度提高3个数量级以上,这将有望使全空域、全时域的无缝导航成为可能。本文以近十年的研究成果为主,综述典型水下导航技术的应用现状及技术瓶颈,并提出解决技术问题的关键思路。在此基础上,从3个维度对未来水下导航技术进行了展望。
1 惯性导航技术
惯性导航系统(inertia navigation system, INS)具有完全自主式、隐蔽性好等优点,可以实时输出高精度的位置、姿态、速度信息,适用于全自主水下长时间导航需求,此外还可以方便地与其他导航技术相结合,比如DVL、重力仪等,建立组合导航系统,因而成为当前AUV的首选导航方式,尤其对于隐蔽性要求很高的军事用途的AUV。
随着INS不断发展,一些新型的惯性定位系统也不断涌现,如光子惯性导航系统(photon inertial navigation system, PHINS)。法国IXSEA公司开发了1种目前世界上最轻便的水下惯性导航系统PHINS,定位精度高达1111.2 m/h[1]。综合来看,我国惯性导航技术和国外还有很大差距,主要体现在系统总体精度和功能特性不足,惯性传感器精度较低。图1、图2分别为PHINS和国产高精度SGC25-7A 3轴光纤陀螺惯导设备外观图。

图1 PHINS外观图

图2 国产GC25-7A 3轴光纤陀螺惯导设备外观图
AUV在水下航行时在不可预知洋流作用下会发生运动轨迹漂移,尤其是基于积分方式的惯性导航系统中,误差会随着时间的积累而趋向发散,且严重依赖于传感器的精度。为此,科研机构和高校在INS系统精度的提升方面进行系统地研究工作。INS的关键技术是高精度惯性器件制造、惯性系统建模与校标、姿态更新和初始误差的修正。文献[2]从提高INS器件精度方面,引入外部观测数据2种方案减小误差。文献[3]从提高初始对准捷联惯导系统(strap-down inertial navigation system,SINS)精度并指出而无迹卡尔曼滤波(unscented Kalman filter,UKF)和容积卡尔曼滤波(cubature Kalman filter,CKF)在处理非线性滤波可让误差收敛。
2 量子导航定位技术
单一的惯性导航技术在隐蔽性、自主性方面有强大的优势,但严重依赖传感器的精度。目前发展的2种量子导航定位系统(quantum navigation positioning system, QPS)有星基导航系统(satellite based navigational system)和量子惯性导航系统(quantum inertial navigation system),QPS在定位精度和安全性方面有绝对的优势。在量子力学理论所能允许的情况下,每个量子脉冲中所包含光子数目的多少对其精度起决定性作用。脉冲时延的测量精度可比全球定位系统(global positioning system, GPS)的定位精度高出2~4个数量级。此外,在安全性方面,基于量子特征的卫星定位系统可以通过设置量子加密大大提高安全性,对军方应用方面有着很大的优势。
基于冷原子干涉的原子惯性传感技术被美国国防部高级研究计划局(Defense Advanced Research Projects Agency, DARPA)视为下一代主导惯性技术,提出“精确惯性导航系统(precise inertial navigation system, PINS)”研究计划。在该计划的支持下,美国斯坦福大学和耶鲁大学成功研制第1套实验室原子干涉陀螺,随后麻省理工学院研制的原子激光陀螺比当前最先进的陀螺精度高3个数量级以上[4],冷原子敏感器为惯性技术提供了美好的前景和途径,可不用其他外部辅助技术就可以达到超高精度导航水平,可有效解决INS随时间漂移问题。
3 组合导航技术
组合导航系统主要由惯性导航设备、卫星导航设备和多普勒计程仪组成,其中惯性导航设备是核心,融合卫星导航和多普勒计程仪的信息,将组合导航信息提供给潜器中央控制器和探测设备等用户,主要信息流程如图3所示。
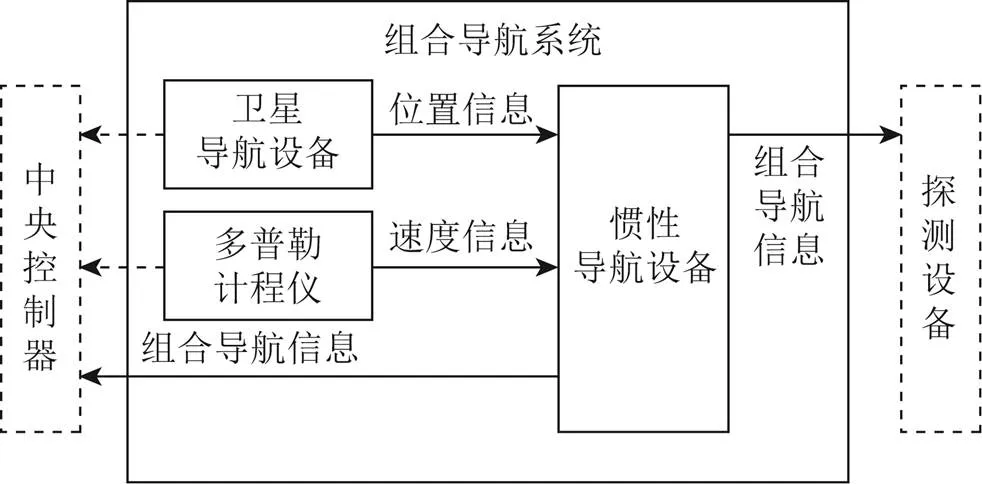
图3 组合导航系统信息流程图
水声技术和INS组合导航系统在限制INS随时间漂移方面起着关键作用,这其中以多普勒测速仪和INS组合最为典型。如LinKQuest公司研发的NavQuest系列产品、TRDI公司的Workhorse Navigator、Explorer、Custom Engineered Solution等,丹麦和美国Kearfortt公司联合开发的DVL/SINS组合导航系统,定位实验精度达到航程的0.03 %[5]。Hugin 1000 AUV采用的DVL/INS组合导航试验中,在水下连续3 h航行的测试中最大航行误差小于4 m。加拿大ISE公司、水道研究所和国防部联合研发的ARCS型号AUV组合导航系统,导航精度达到航程的0.05 %。国内天津大学水下机器人团队研发的AUV在2014年进行了初步海试,采用SINS/DVL、超短基线定位系统(ultra-short baseline positioning system,USBL)、深度计、GPS组合导航系统,实验航行误差为航距的0.3 %~0.6 %。表1概括了典型AUV组合导航系统。表1中:DR(dead reckoning)表示航位推算;DGPS(differential GPS)表示差分GPS;SBL(short baseline system)表示短基线系统;LBL(long baseline system)表示长基线系统。
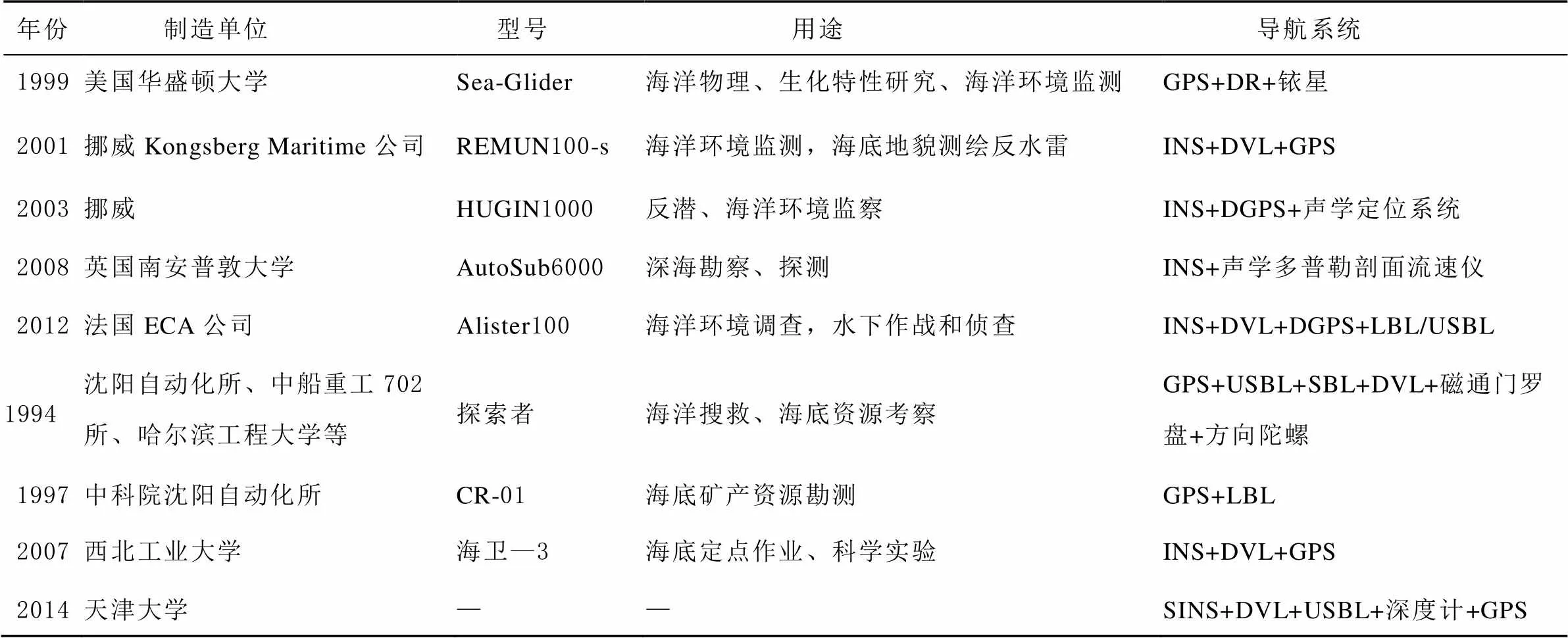
表1 AUV组合导航系统应用情况概貌
目前,组合导航成品以Sublocus DVL、PHINS 6000最具常见,PHINS 6000仅有1种型号,产品还没有形成系列化,价格昂贵难以满足不同背景需求的科研需求。国内中航工业西安飞行自动控制研究所自主研发的SINS/DVL组合导航精度在一般工况下误差为航程的0.3 %,恶劣工况下为航程的0.5 %。
惯性传感器部件精度是限制组合导航精度提高的最大的技术障碍,通过引入捷联惯导、多普勒计程仪、声学定位、地形匹配定位等构建惯性基组合导航系统,着力解决组合导航中的初始位置确定、移动单信标测距、DVL安装误差及测速盲区、有限地形匹配定位等问题将是今后的主要技术方向。针对USBL和INS松组合至少需要3个以上信标才能确定AUV位置信息的问题[6],文献[7]研究了USBL和INS的紧组合问题。文献[8]指出DVL在大滚动和俯仰的情况下会发生故障,DVL还对声学环境的好坏较为敏感,在地形复杂区域易出现信号短期中断。
4 水下地形匹配导航技术
地形匹配(terrain reference navigation, TRN)技术是利用地形特征的时空不变性和局部唯一性为AUV提供位置参考,通过已知的海底地形进而获得AUV的绝对位置。由于不依赖于导航器件,不受其传感器精度限制等优势,成为最适用的方法之一。但只能在预先储存基准水下数字地图区域进行导航,因此常作为1种辅助水下导航方式。由于海底地形和地形辅助导航系统与武器装备和作战使用紧密相关,国外对此技术细节是保密的。北约组织六家单位曾用HUGIN水下航行器进行多次海试,该潜器装有FFI研制的地形辅助导航设备。美国斯坦福大学与蒙特利湾水下研究所在Benthic Imaging AUV进行了基于多波束声呐的水下地形匹配实验,在海试中获得了4~10 m的定位精度;在返回出发点的过程中,结合地形匹配的导航最终引导误差为35 m,远低于依靠基础导航系统引导的140 m[9-10]。日本东京大学和日本海洋工程研究院在鹿儿岛海域进行TRN实验,实验结果精度达到了预期目标[11-12]。图4所示的Benthic Imaging AUV地形匹配实验结果。

图4 Benthic Imaging AUV地形匹配实验结果
水下地形匹配方法可以总结归纳3类:①水下地形批处理匹配导航技术;②基于扩展卡尔曼滤波的水下地形匹配导航技术;③基于直接概率准则的水下地形导航技术。当前,国外对匹配算法的研究比较倾向于扩展卡尔曼滤波和直接概率准则。文献[13]对水下数字地图做了分析,并通过湖验初步证明水下地形匹配方案的可行性。文献[14]指出基于直接概率准则的水下地形匹配导航技术因为不需要对地形进行线性化处理而有明显优势,是近年来的研究热点。
5 地图构建导航技术
将AUV自身携带的扫描成像声呐、DVL,配合平台传感器(惯导、罗盘等)在航行过程中自主地探索、识别周围环境同时在线地实现自身的定位等问题进行研究,这就是机器人领域研究热点即同时定位与地图构建(simultaneous localization and mapping,SLAM),自主水下航行器是SLAM的1个主要研究领域,美国国家航空航天局(The National Aeronautics and Space Administration, NASA)资助开发的DepthX项目用于水下洞穴的考察,能实现完全自主定位。
在实际应用中,SLAM在自然海域导航定位会随着特征数量的增加造成计算复杂度大幅提高、观测特征和地图中已有的特征之间正确的数据关联度等问题被认为是SLAM的关键技术。当前,SLAM技术主要集中在美国、澳大利亚、英国等国家。美国密歇根大学和伍兹霍尔海洋研究院对百慕大群岛海底地形进行了3维重建,澳大利亚悉尼大学菲尔德机器人研究中心利用结构环境对SLAM进行理论研并实验绘制了横贯大西洋测地线上的热液口区域地图。文献[15]在人造结构性环境中使用声纳传感器进行了导航定位研究。文献[16]从扩展卡尔曼滤波算法在线性化建模过程中会产生误差方面进行研究,提出1种虚拟噪声补偿技术,使得SLAM精度显著提高。文献[17]提出1种NAPS(negative and positive scoring)算法,该算法每隔1段时间的周期对前面所产生的节点进行边缘化处理,从而降低不断使用SLAM时增加的图形带来的计算复杂度。
6 地磁、重力导航技术
地磁场是地球固有的保守力场,地磁导航(geomagnetic navigation)技术因具有强大的隐蔽性、无累计误差、抗干扰强等特点在多个领域得到了研究和应用。该技术利用地球表面周围的地磁场的不同,通过匹配算法,构建AUV的无源导航系统[18-19],是1种备受关注的辅助导航系统。地磁匹配算法、地磁场延拓、地磁图适配性、外干扰补偿等问题是地磁导航的关键技术难点。2009年,日本使用AUV在骏河湾进行了地磁数据和水深数据进行了仿真实验[20]。国防科技大学在2011年进行了惯性/地磁匹配水下导航实验,验证了惯性/地磁匹配组合导航技术的可行性。
重力导航(gravity navigation)是1种高隐蔽性、无源、完全自主的导航方式。重力仪作为重力导航关键支撑设备,能利用重力敏感器仅敏感当地垂线方向的惯性力信息,经过重力信号解析后得到当地重力异常信息,水平方向则由系统稳定平台提供。地磁、重力导航通常作为辅助INS组合导航使用。图5所示的是高精度海洋仪。

图5 高精度海洋重力仪的主要部件
2016年,中船重工707所在国家973计划支持下,完成了永兴岛附近海域2个典型重力场区域惯性/重力匹配组合导航技术实船原理性验证试验,并结合随船试验的1套美国L&R SII海洋重力仪对自研重力仪测量精度进行了评估。其动态精度为1×10-5m/s2;月漂移≤3×10-5m/s2;分辨率≤1×10-6m/s2;测量量程:±0.1 m/s2,精度已达到美国L&R SII海洋重力仪测量精度。文献[21]对重力导航和地磁导航进行了对比实验,并指出在一些重力或者磁力变化不足的地区将这2种方法结合起来具有更好的导航性能。文献[22]提出1种存在地磁异常的新策略,让AUV在没有地磁图的情况下到达目的地,仿真结果证明能有效地克服地磁异常的干扰。随着地磁矢量传感器技术和地磁适量探测技术的发展,建立起高精度的地磁矢量数据库将是今后1个重要的技术发展方向。
7 协同导航技术
协同导航(cooperative navigation, CN)技术是当前西方发达国家AUV技术研究前沿领域,但大部分成果仍处于理论探索和原理验证阶段。AUV协同导航技术是基于网络的导航方式,利用水声通讯技术,共享传感器的测量信息对AUV间的相对位置关系进行融合提高导航与定位精度,已有研究表明协同导航能有效抑制航位推算的自主导航误差对协同定位精度影响,使得导航的整体定位误差有界。
2006年,美国自主海洋采样网络(autonomous ocean sampling network,AOSN)项目在蒙特利海湾附近海域进行多AUV之间的水声通讯及协同定位问题。2009年,欧盟(coordination and control of cooperating unmanned systems, GREX)项目[23]完成多AUV协作下的海洋环境测绘任务。图7、图8分别表示并行式协同导航系统示意图和美国麻省理工学院的CADRE主从式协同导航系统(cooperative autonomy for distributed reconnaissance and exploration system)。

图6 并行式协同导航系统示意图
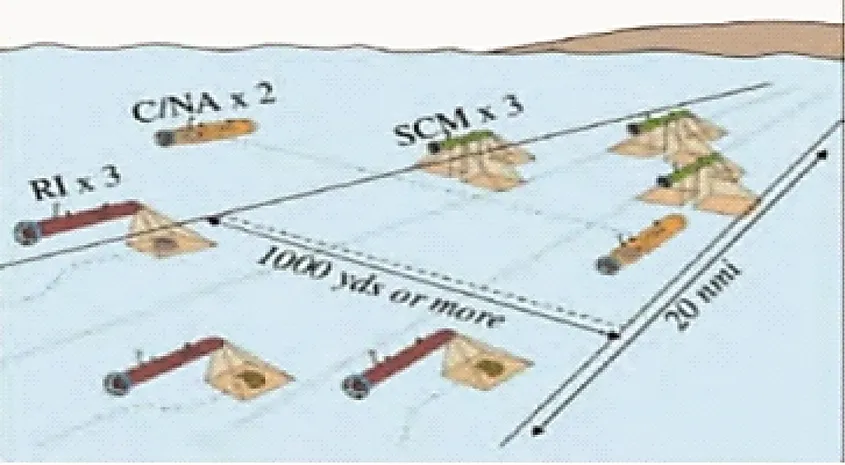
图7 CADRE主从式协同导航系统示意图
并行式(parallel mode)协同导航方式中每个AUV有同等的地位与配置,通常要求与多个邻居通信,受水声通信频带的限制大,移动长基线协同导航系统(moving long base line system,MLBL)是多移动领航者协同导航方法的1个典型代表。美国Virginia Tech利用AUV组建协同导航系统,利用内置同步时钟确定声波信号的传播时间差,并利用先进的WHIO Micro-Modems在AUV之间进行水声通讯,水下通信率为32 B/(10 s),是当时最先进的水声通讯速度。
当洋流作用在AUV编队时,会导致AUV轨迹的漂移,造成主AUV自身的定位误差和主、从AUV之间的测距误差,成为制约水下航行器协同导航定位的技术发展瓶颈[24-26]。此外,由于海洋水下环境的复杂性和不确定性,尤其在热液区和地形复杂区声信号极易被遮挡,AUV之间通信受到极大地挑战。值得关注的是2016年中科院声学所联合北京航天控制仪器研究所成功研发了高速数字水声通讯传输技术,并首次实现了深海潜标观测数据实时化传输,破解了该领域的世界难题。
主从式(leader-follower mode)协同导航中仅领航者和跟随者之间通信,主AUV装备有高精度INS、DVL、DGPS和深度计。就目前而言主从式AUV协同导航的研究尚处于起步阶段,在定位误差收敛性、定位误差上界估计、系统整体误差和相对位置测量的传递关系等方面尚未有较明确的结论和论证。美国麻省理工学院开发的CADRE系统[27]、University of porto研究小组研究的移动基线系统均采用主从式协同导航技术。Idaho大学采用2个相距1 m的双水听器通过水声信号接受的相位差得到AUV间的相对方差。
6 结束语
本文对于AUV水下导航技术现状做了系统总结,并结合近几年国内水下导航技术的成果进行了部分技术对比介绍和分析。正如美国发布《下一代无人水下系统》报告中描述的那样:“加快水下无人系统实战化,不断推进水下无人航行器的研发和作战实践,推动AUV集群协同发展”。未来水下导航技术对自主无人航行器发展起着支撑作用,针对当前导航技术的现状,总结出了一些对未来导航技术的发展展望:
1)从无辅助的单一水下导航方面来看,惯性导航具有很强的隐蔽性及完全自主式特点,但在短期内难以达到水下长时间高精度导航的水平。从长远来看,一方面加强惯导平台的系统精度,提高惯性系统的整体可靠性,缩小与国外先进技术的差距。另一方面加大扶持基于冷原子干涉的量子惯性导航技术力度,特别是目前该技术处于起步阶段,与国外研究差距并不大,量子惯性导航系统的应用,未来必将对水下导航技术产生颠覆性突破。
2)当前水下航行器的导航方式以组合导航为主,SINS/DVL作为1种重要、典型的组合导航系统,一直以来受到很高的重视,从技术现状来看,SINS/DVL技术的瓶颈在于关键传感器的精度难以有较大提高。未来,相关部门应重点扶植和发展一体化和模块化的国产水下惯性组合导航技术产品,如地形匹配辅助导航、地磁和重力这些无源及高隐蔽性辅助导航方式,为自主水下航行器研究提供必要的技术配套和保证,占领和巩固国内市场。
3)从未来战略性角度来看,AUV将由单个系统朝向集群化趋势发展,与其他无人系统组网协同,通过网络化无人平台的分布式态势感知和信息共享,提高作战和应用效能。能执行多任务、大范围活动、信息共享的协同导航技术将是未来AUV研究领域的热点和难点。
[1] XBLUE Inc. FOG-based high-performance inertial navigation system[EB/OL].[2019-08-28]. https://www.ixblue. com/sites/default/files/2019-06/Phins_2019.pdf.
[2] MELOA J, MATOS A.Survey on advances on terrain based navigation for autonomous underwater vehicles[EB/OL].[2019-08-28].https://paginas.fe.up.pt/~dee10008/papers/201705_article_oceaneng_jmelo.pdf.
[3] WANG C, ZHU H, LI G, et al. The mixed level damping of the single-axial rotation of INS[EB/OL].[2019-08-28].https://www.spiedigitallibrary.org/conference-proceedings-of-spie/8350/83500J/The-mixed-level-damping-of-the-single-axial-rotation-of/10.1117/12.920453.short.
[4] 朱如意.量子测量:未来导航领域的颠覆性技术[N].中国航天报,2017-07-12(3).
[5] TRONI G, WHITCOMB L L.Advances in ln Situ alignment calibration of Doppler and high/low-end attitude sensors for underwater vehicle navigation: theory and experimental evaluation[J].Journal of Field Robotics, 2015, 32(5): 655-674.
[6] 陈强. 水下无人航行器[M]. 北京:国防工业出版社, 2014: 227-230.
[7] 张涛,石宏飞,徐晓苏.基于SINS/LBL紧组合的AUV水下导航定位技术[J].中国惯性技术学报, 2015, 23(4): 500-504.
[8] MORGADO M,OLIVEIRA P,SILVESTRE C.Tightly coupled ultrashort baseline and inertial navigation system for underwater vehicles: an experimental validation[J].Journal of Field Robotics, 2013, 30(1): 142-170.
[9] MEDUNA D K, ROCK S M, MCEWEN R S.Closed-loop terrain relative navigation for AUVs with non-inertial grade navigation sensors[EB/OL].[2019-08-28].https://ieeexplore.ieee.org/document/5779659.
[10] MEDUNA D K, ROCK S M, MCEWEN R S.Low-cost terrain relative navigation for long-range AUVs[EB/OL].[2019-08-28]. https://ieeexplore.ieee.org/document/5152043.
[11] NAKATANI T, URA T, ITO Y, et al.AUV "TUNA-SAND" and its exploration of hydrothermal vents at Kagoshima bay[EB/OL].[2019-08-28].https://ieeexplore.ieee.org/document/4531099.
[12] NAKATANI T, URA T, SAKAMAKI T,et al.Terrain based localization for pinpoint observation of deep seafloors[EB/OL].[2019-08-28].https://ieeexplore.ieee.org/document/5278194.
[13] 邹炜, 孙玉臣.水下地形匹配辅助导航技术研究[J].船舶电子工程, 2017, 37(8): 5-10.
[14] NYGREN I.Terrain navigation for underwater vehicles[EB/OL]. [2019-08-28].https://www.diva-portal.org/smash/ get/diva2:14353/FULLTEXT01.pdf.
[15] SALVI J, PETILLOT Y, BATLLE E.Visual SLAM for 3D lager-scale seabed acquisition employing underwater vehicles[EB/OL]. [2019-08-28]. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.657.3397&rep=rep1& type=pdf.
[16] CAO M L, LI Z, LI F F.On improved simultaneous localization and mapping algorithm for underwater navigation[EB/OL]. [2019-08-28].https://ieeexplore.ieee.org/document/7554177.
[17] FALLON M F, FOLKESSON J, MCCLELLAND H, et al.Relocating underwater featurres autonomously using sonar-based SLAM[J].IEEE Journal of Oceanic Engineering,2013,38(3): 500-513.
[18] LIU Y, WU M P, HU X P, et al.Research on geomagnetic matching methods[EB/OL]. [2019-08-28].https://ieeexplore.ieee.org/document/4318904.
[19] HUANG Y, SUN F, HAO Y L.Vehicle attitude detection in underwater magnetic anomaly localization experiment[EB/OL]. [2019-08-28].https://ieeexplore.ieee.org/document/5633068.
[20] KATO N, SHIGETOMI T. Underwater navigation for long-rang autonomous underwater vehicles using geomagnetic and bathymetric information[J]. Advanced Robotics, 2009, 23(7/8): 787-803.
[21] ZHENG Hui,WANG H B,WU Lin, et al.Simulation research on gravity-geomagnetic combined aided underwater navigation[J],The Journal of Navigation, 2013, 66(1): 83-98.
[22] LI H, LIU M Y, ZHANG F H.Geomagnetic navigation of autonomous underwater vehicle based on multi-objective evolutionary algorithm[J]. Frontiers in Neurorobotics, 2017, 11(34): 1-8.
[23] KALWA J.The GREX-Project: coordination and control of cooperating heterogeneous unmanned systems in uncertain environments[EB/OL]. [2019-08-28].https://ieeexplore.ieee.org/document/5278179.
[24] CHANDRASEKHAR V, SEAH W K G, CHOO Y S, et al.Localization in underwater sensor networks-survey and challenges[EB/OL].[2019-08-28]. http://vijaychan.github.io/Publications/2006%20-%20Localization%20in% 20Underwater%20Sensor%20Networks-%20Survey%20and%20challenges.pdf.
[25] STUTTERS L, LIU H H,TILTMAN C, et al.Navigation technologies for autonomous underwater vehicles[J]. IEEE Transaction on Systems Man and Cybernetics, 2008, 38(4): 581-589.
[26] BACCOU P, JOUVENCEL B.Simulation results,post-processing experimentation and comparison results for navigation,homing and multiple vehicle operations with a new positioning method using a transponder[EB/OL]. [2019-08-28].https://ieeexplore.ieee.org/document/1250729.
[27] MACIEL B. De SOUSA J B.Sensor-based problems and techniques for autonomous underwanter vehicles[EB/OL]. [2019-08-28].https://ieeexplore.ieee.org/document/5278232.
Development status and analysis of navigation technology for autonomous underwater vehicles
ZHANG Shitong1, ZHANG Hongwei1, WANG Yanhui1, ZHANG Yupeng1, XIE Yangguang2
(1. Tianjin University School of Mechanical Engineering, Tianjin 300072, China; 2. Avic Xi’an Flight Automatic Control Research Institute, Xi’an 710065, China)
Autonomous underwater vehicle (AUV) is an important technical equipment for ocean exploration and surveying. Faced with poor real-time performance, less information sources and high complexity, its navigation has become a frontier research field of marine science and technology in developed countries. The paper systematically summarized the development status of AUV frontier navigation technique, emphasized the research hotspots of underwater navigation , proposed the key technologies of mainstream navigation. Finally, according to the analysis, the technical characteristics of the respective navigation methods were summarized from the three dimensions of no-aided inertial navigation, integrated navigation and cooperative navigation, and then the development trend of AUV navigation technology was analyzed.
autonomous underwater vehicle;navigation technology;aided underwater navigation;integration navigation;cooperative navigation
P228
A
2095-4999(2020)02-0001-07
张世童,张宏伟,王延辉,等. 自主水下航行器导航技术发展现状与分析[J]. 导航定位学报, 2020, 8(2): 1-7.(ZHANG Shitong, ZHANG Hongwei, WANG Yanhui, et al. Development status and analysis of navigation technology for autonomous underwater vehicles[J]. Journal of Navigation and Positioning, 2020, 8(2): 1-7.)
10.16547/j.cnki.10-1096.20200201.
2019-10-30
国家自然科学基金项目(51575376)。
张世童(1992—),男,安徽阜阳人,硕士研究生,研究方向为AUV导航和海底管道自主跟踪技术。
张宏伟(1976—),男,河北唐山人,博士,副教授,硕士生导师,研究方向为海洋装备动力学分析、水下导航等领域。
猜你喜欢
导航定位学报(2022年4期)2022-08-16
舰船科学技术(2022年11期)2022-07-15
北京航空航天大学学报(2022年6期)2022-07-02
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2021年7期)2021-10-13
科学与财富(2021年33期)2021-05-10
现代电子技术(2015年15期)2015-08-14
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02