
一种宽容偏航的多阵元高频SAS成像算法
2020-04-10 02:58:02洪煜宸丛卫华
声学与电子工程 2020年1期
洪煜宸 丛卫华
(第七一五研究所,杭州,310023)
拖曳式SAS将声呐基阵拖曳在运载平台尾部,通过拖缆缓冲母船摇摆和升沉的影响,并且减小平台噪声与调节基阵入水深度[1],扫海作业时一般要求顺流或者逆流,以便获得较好运动姿态。实际工作中声呐基阵在前进过程中仍不可避免受到水下侧流影响,导致SAS基阵出现偏航。偏航一方面导致声呐基阵照射角度变化,SAS算法模型失配,使得走航向上目标成像拉长;另一方面接收阵元空间位置变化产生运动误差,使得分辨力下降。
运动补偿一直是 SAS研究的核心内容之一[2],而针对多阵元SAS偏航下成像问题的讨论并不多,对该现象的研究一般都基于单阵元频域距离-多普勒算法或CS(Chirp-Scaling)算法[3-4],研究内容多数讨论基于距离徙动与多普勒中心频率的矫正。本文借鉴斜视合成孔径技术[5-6],建立偏航状态下的多阵元SAS成像模型,分析偏航状态下的模型失配与运动误差情况,从模型适配与运动补偿两方面改进矩阵求和SAS算法[7],提高偏航下多阵元SAS的成像效果。最后通过仿真与实验数据的处理验证了本文方法的有效性。
1 偏航多阵元合成孔径模型分析
SAS工作时匀速直线移动,对目标回波进行相干处理来完成合成孔径成像。偏航对成像有两方面影响:声呐基阵照射范围偏离正侧视,接收信号为前方或后方的目标回波,与传统合成孔径成像模型有偏差,造成目标成像失真;偏航导致多阵元的目标回波声程与理想的SAS目标回波声程的抛物线模型不一致,呈现阶梯状,导致合成孔径成像散焦。
1.1 回波模型
SAS常采用多阵元来解决平台航速与成像距离之间的矛盾[8],为了分析偏航对多阵元合成孔径成像的影响,建立偏航时的合成孔径几何模型,模型中的SAS为收发合置,投影到二维坐标系中的模型如图1所示,x轴表示走航向,r轴表示距离向。

图1 偏航SAS几何模型
成像场景中空间采样点坐标为(xi,ri),阵元i=jL+l,其中j表示空间采样的周期序号,L表示多阵元SAS的阵元个数,l表示对应的阵元序号。阵元间距为d,偏航角为θyaw时,采样的空间位置为

SAS接收到点目标 (x0,r0)的回波信号为

其中

式中,A(θ)为SAS基阵的指向性,偏航时基阵的波束中心发生偏移,θi表示回波的到达角度;s(t)为SAS的发射信号;τi表示第i阵元的回波时延,其中代表空间采样i与点目标间的声程,c表示声速。
在偏航时,模型中基阵波束中心的偏移使得θi的变化不再对称,多阵元的位置偏移直线导致多阵元之间τi额外产生阶梯状的时延,两者对合成孔径成像都会造成影响。
1.2 SAS模型失配
时域上的合成孔径处理在频域上等同于多普勒匹配滤波。理想模型的多普勒频移、最大多普勒与多普勒带宽为

式中,v为载体的运动速度,λ为声波波长,θ3dB为阵元指向性-3 dB的波束宽度,D为物理阵元长度。多普勒中心fdc=0。根据模型,空间频率以脉冲重复频率(Pulse Repetition Frequency,PRF)表示:

而在偏航状态下,SAS波束中心的偏移使得多普勒中心偏移。最大多普勒为

回波的多普勒频移如图2所示,可见最大多普勒大于1/2的空间采样率,偏航时空间采样不满足采样定理,成像会出现栅瓣[9];频域的匹配滤波失配,分辨力下降。

对时域合成孔径成像算法而言,以空间虚拟孔径的长度为最大合成孔径长度。根据阵元的指向性,理想情况下的最大合成孔径的长度为则对于模型中的点目标 (x0,r0),传统合成孔径算法以为该点的合成孔径范围。偏航状态下波束中心偏移,有效合成孔径范围为

传统 SAS算法的合成孔径范围与实际有效的合成孔径范围错位,导致成像的分辨力下降,偏航角较大时目标图像失真。

图2 偏航时回波的多普勒频移
1.3 多阵元运动误差
SAS在实际扫海作业中很难保持直线轨迹,必然存在运动误差,引起目标声程变化,变化尺度往往大于声波的1/4波长,导致SAS成像模糊散焦。
偏航时多阵元空间位的偏移量互不相同,产生的运动误差互不相同,位于边缘的阵元运动误差更大,且空间采样间隔也会因偏航而变化,所以偏航带来的运动误差对于成像的危害较大。以偏航9°时200 m处的仿真点目标回波为例,回波的脉冲压缩直观体现为阶梯状,如图3所示,影响合成孔径的相干处理。

图3 仿真点目标的脉冲压缩图像
另外,接收阵之间的声程差需要通过运动误差的估计来补偿,由于偏航状态下运动补偿后的阵元投影至直线航迹上,等效阵长缩短,空间采样与理论模型不相符。
1.4 SAS工作频率与偏航成像的关系
高频SAS成像受偏航影响比低频SAS更为严重。首先,高频 SAS声呐基阵的波束开角较低频SAS小,偏航时多普勒中心偏移大,模型失配更严重,宽容度小;其次,高频SAS波长更短,同一声程误差对应的相位差更大,成像散焦更严重。相比之下,对模型失配和运动误差更敏感的高频SAS更需要宽容偏航的合成孔径成像算法以提高偏航时的成像效果。
2 宽容偏航的多子阵SAS算法
2.1 自适应的合成孔径矩阵计算
本文采用矩阵求和算法来进行合成孔径处理,该算法本质上是反向投影(Back-Projection,BP)算法,将回波数据按反向扩展理论列为一个图像矩阵,在图像域通过矩阵移位叠加来完成合成孔径的处理,相比逐点延时求和算法能够提高运算速度。
偏航时的模型匹配包括空间采样与合成孔径长度的调整。偏航时阵元长度在走航向上的投影为D'=Dcosθyaw,空间采样率应为

在进行合成孔径处理之前,按式(8)调整空间采样频率。理想模型中,空间成像点(x,r)的有效孔径为偏航状态下,本文通过偏航角来实时调整算法的有效孔径,实现偏航模型的匹配。当前偏航角值来自惯性导航系统的测量结果或相位中心重叠算法的估计值。偏航角为θyaw时,自适应的孔径其中:

根据反向投影理论,将回波ei(t)扩展为图像矩阵:

式中,τi为合成孔径范围内的空间采样与成像点之间的时延,可以提前运算并通过查询方式实现对Ei的快速计算。得到Ei后通过矩阵间的移位相干叠加完成合成孔径处理:

式中,M表示图像的走航维长度,N为图像的距离维长度。本文宽容偏航的矩阵求和合成孔径算法如图4所示,通过自适应的孔径范围计算保证偏航时回波有效信息的利用,从算法的实时性来说,计算量基本与传统合成孔径成像算法保持一致。

图4 偏航矩阵求和合成孔径算法示意
2.2 运动补偿
偏航导致多阵元SAS回波声程呈现阶梯状,需要对多阵元补偿声程差后再进行合成孔径处理。以阵元位置偏移量在运动轨迹上的投影来进行补偿。由于运动误差往往互相耦合,进行补偿时需要考虑偏航角和横滚角θroll等相互耦合的分量。补偿量为

式中,β为基阵横向波束中心角与水平面的夹角。由于实际工作中的声呐基阵一般高于水底与水中目标,偏航时不同方位角上目标的运动误差不同,对水底的大面积成像用基阵方位向指向性的中心角位置计算;对特定的目标区域成像时可直接用目标方位角来计算时延补偿值。考虑运动误差的距离空变性,可以进行距离向分段的运动补偿以提高补偿精确度[10]。
根据Δri对式(12)的图像矩阵进行平移后再相干叠加,可以得到补偿后的矩阵求和合成孔径处理为:

本文提出的宽容偏航成像的实时多子阵 SAS算法流程图如图5所示,实时系统中根据偏航角调整空间采样率,获得湿端的原始数据后可以直接进行多阵元的移位补偿,能够实现矩阵移位的效果并且减小计算量。最后通过孔径范围自适应的矩阵求和算法来完成成像。
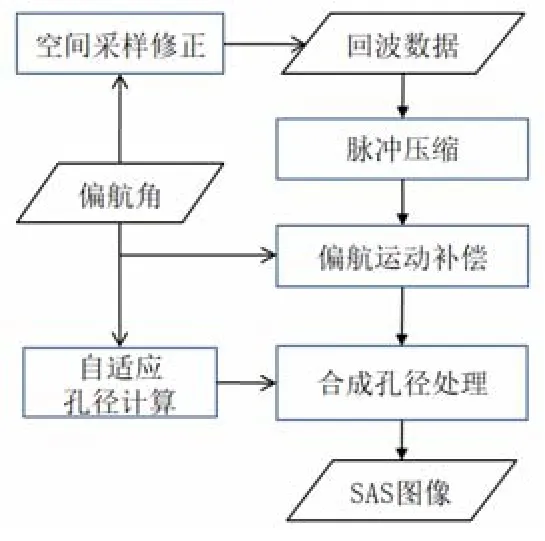
图5 本文宽容偏航的SAS算法流程图
3 仿真与实验结果
3.1 仿真参数与结果
对偏航状态的多子阵高频SAS成像进行仿真,SAS的中心频率80 kHz,阵元物理波束宽度为14°,在运动过程中SAS偏航9°,超过半边波束宽度。场景中有距离200 m的十字型目标。分别用未经偏航处理的合成孔径成像算法、经过运动补偿的合成孔径成像算法和本文算法对仿真数据进行处理,三种处理方法的成像结果如图6所示。图中,(a)目标图像明显失真并出现栅瓣;(b)目标仍有拉长和失真现象;(c)图像分辨力明显提高,没有栅瓣,成像效果更好。点目标的走航分辨力剖面如图7所示,相比仅运动补偿,本文算法处理得到的目标分辨力从 17.1 cm提高至5.5 cm。


图6 三种算法目标成像对比

图7 仿真目标走航剖面图
3.2 实际试验成像结果
某试验中对一水底长约1.5 m柱状目标的多阵元高频合成孔径成像见图8,目标位于 SAS右舷,斜距约76 m处,偏航角在-7°~-8°变化。无偏航处理的合成孔径成像结果如图8(a)所示,而运用了宽容偏航的合成孔径算法成像结果如图8(b)所示。可以明显看出(b)较(a)更能体现目标特征,图像对比度提高。目标图像的走航分辨力剖面如图8(c)所示,本文算法目标图像的峰值旁瓣比高于无偏航处理算法的成像结果。


图8 实际试验对水底目标的合成孔径成像
在轻微偏航的情况下,本文算法也能一定程度上提高成像的清晰度。某试验中有数据回放功能的SAS实时成像系统分别利用原有算法与本文宽容偏航算法对同一水底地形地貌数据进行成像,偏航1°~2°,同一时刻实时成像对比见图 9。可以看出,本文宽容偏航算法的成像结果阴影与边缘较为明显,水下特征地形地貌成像更清晰,例如图中的棍状物。图8与图9的成像结果均表明了本文宽容偏航合成孔径成像算法的有效性。
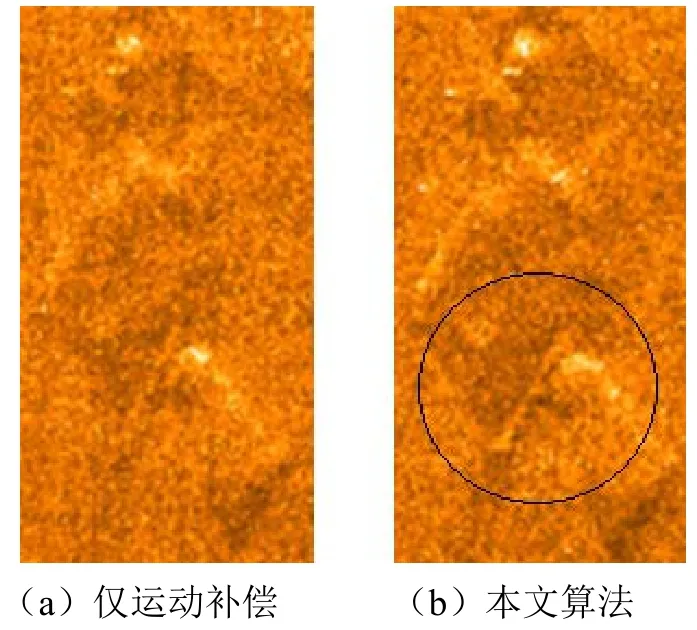
图9 实际试验轻微偏航下对局部水底地形地貌的成像结果
4 结论
本文建立了偏航下多阵元高频合成孔径理论模型,提出了一种宽容偏航的多阵元高频SAS矩阵求和成像算法,根据实际偏航角修正空间采样率,并通过自适应孔径调整来保证模型匹配,通过偏航运动误差补偿保证信号相干叠加。仿真和实际试验数据的处理结果表明,本文的宽容偏航合成孔径成像算法能够改善偏航时SAS成像的模糊、失真与拉长现象。该算法运用于多阵元高频合成孔径实时成像系统,可以改善偏航状态下的合成孔径成像聚焦效果,在实际工程应用中具有显著价值。
猜你喜欢
潍坊学院学报(2021年2期)2021-07-22 07:59:24
电脑知识与技术(2019年13期)2019-07-08 02:23:41
水下无人系统学报(2018年5期)2018-11-09 07:40:54
声学与电子工程(2017年1期)2017-06-22 11:30:07
电子器件(2015年5期)2015-12-29 08:43:38
西北工业大学学报(2015年3期)2015-12-14 13:08:44
声学技术(2015年1期)2015-09-07 06:44:52
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:23
机械与电子(2014年2期)2014-02-28 02:07:47
电子设计工程(2014年8期)2014-02-27 11:57:22
