
特高压直流分层接入方式下抑制连续换相失败的优化控制策略
2020-04-10 12:34秦梁栋刘宁宁戴志辉
华北电力大学学报(自然科学版) 2020年2期
袁 博, 王 颖, 邵 华, 秦梁栋, 刘宁宁, 戴志辉
(1.国网河北省电力有限公司经济技术研究院, 河北 石家庄 050021; 2.国网河北省电力有限公司, 河北 石家庄 050021; 3.华北电力大学, 河北 保定 071003)
0 引 言
我国已形成世界上规模最大、电压等级最高的交直流混联电网。在成功建设±800 kV特高压直流(Ultra High Voltage Direct Current,UHVDC)的基础上,±1 100 kV特高压直流成为我国正在研究的一个全新的输电电压等级[1-4]。建成投运的±1 100 kV UHVDC双极额定输送功率可达12 000 MW[2]。然而目前投运的±500 kV以上的HVDC输电多基于电网换相换流器(Line Commutated Converter,LCC)[4],其换流阀采用半控型的晶闸管,当逆变侧交流系统故障导致换流母线电压下降时,易引发直流系统换相失败[5-6]。对于交直流混联系统,换相失败可能导致传输功率瞬时中断,冲击换流器件,引起直流闭锁,引发交流保护误动等。当其受端采用分层接入方式时,某一层交流故障可能引发高、低端逆变器同时换相失败,削弱分层接入UHVDC系统的优势,严重时威胁交直流混联电网的安全稳定运行[4,6]。
现阶段抑制或预防换相失败的方法大致可分为三类:利用无功补偿装置、改进换流器拓扑、优化直流控制系统。文献[7-8]提出利用静止无功补偿器、同步调相机等为系统提供无功支撑,维持电压稳定,进而降低HVDC换相失败的风险。在改进换流器拓扑结构来防换相失败方面,文献[9-10]分别提出了电容换相换流器和可控电容换相换流器,然而前者在故障期间极易发生过电压,后者则存在谐振风险。文献[11]设计了一种增强型电容换相换流器来抑制换相失败,然而其抵御换相失败的能力依赖于故障的快速检测。
在直流系统优化控制方面,目前常采取提前触发、减小直流电流指令、优化低压限流控制器等来抑制换相失败。文献[12]通过模糊控制确定换流器提前触发的角度,文献[13]引入自适应比例积分控制有效抑制了换相失败。文献[5],[14-16]指出提前触发的角度过大可能引发换相失败,可减小直流电流指令来降低HVDC系统换相失败的风险。然而,上述两种方法均依赖于交流故障的快速检测。文献[17]设计了一种动态低压限流控制,然而限流器的延时环节时间常数难以确定,限制了该方法的应用;文献[18]提出了一种基于虚拟电阻电流的控制方法,引入虚拟电阻,体现故障后直流电流的动态变化特性,并结合低压限流控制来抑制换相失败,然而改变电流整定值的响应速度受通讯延时的制约。
基于上述问题,本文提出了一种基于直流电流变化量的定熄弧角改进控制策略,充分利用故障期间和系统恢复过程中直流电流的动态波动特征,快速调节定熄弧角控制器补偿因直流电流上升而减小的熄弧角,以抑制换相失败。利用PSCAD/EMTDC实现了所提出的改进控制策略,并对比分析所提控制方法与CIGRE HVDC标准测试模型中控制策略对换相失败的抑制效果。理论分析和仿真结果表明,所提方法不依赖交流故障的快速检测,能有效抑制各种交流故障下连续换相失败,易于实现且无需增加其他附加投入。
1 分层接入UHVDC输电系统
参考如表1所示的准东—四川±1 100 kV UHVDC输电工程参数,在PSCAD/EMTDC中搭建±1 100 kV受端分层接入的UHVDC输电模型。高、低端逆变器分别接入500 kV、1 000 kV交流系统,每层交流系统独立配置交流滤波器和无功补偿装置,如图1所示。直流控制采用了类似CIGRE HVDC模型中的控制策略[4,6],具体如下。
表1 ±1 100 kV UHVDC系统主要电气量参数
Tab.1 Main circuit parameters of ±1 100 kV UHVDC system
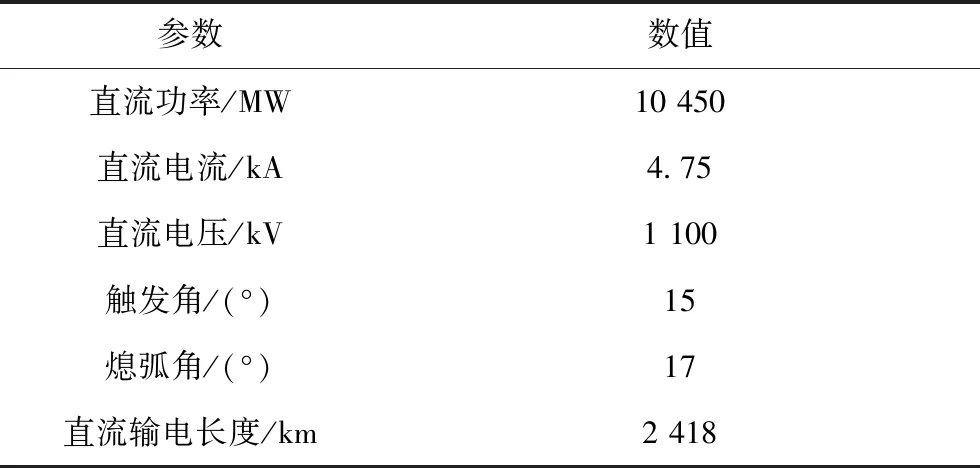
参数数值直流功率/MW10 450直流电流/kA4.75直流电压/kV1 100触发角/(°)15熄弧角/(°)17直流输电长度/km2 418

图1 ±1 100 kV 分层接入的UHVDC系统模型Fig.1 Structure of ±1 100 kV UHVDC system in hierarchical connection
CIGRE HVDC标准模型中整流侧配有定电流控制和最小触发角控制,逆变侧配有定熄弧角控制、定电流控制、电流偏差控制以及低压限流控制[2,4,6]。其中,电流偏差控制的作用是使逆变侧能实现定电流控制与定熄弧角控制的平稳切换。
较之常规直流输电系统,±1 100 kV特高压直流输电由于直流电压和功率提升、换流变短路阻抗提高、系统结构复杂性增加,换相失败对交直流系统的影响更大,可能引起的后果更为严重,同时,发生换相失败的风险增大。当其采用分层接入方式时,某一层交流故障可能引发高、低端逆变器同时换相失败,会使系统的直流功率暂时中断,削弱分层接入UHVDC系统的优势,严重时威胁系统的安全稳定运行。为此,亟需研究±1 100 kV分层接入方式下防换相失败方法,改善其故障恢复特性。
2 换相失败机理分析
LCC-HVDC输电采用晶闸管作为换流器件,其退出导通需要承受一定的反压。若欲退出的阀在换相过程已结束但阻断能力未恢复时,当电压转向后,该阀将重新导通,向刚导通的阀倒换相,称为换相失败[6,7,19]。其本质是熄弧角不足,设阀恢复阻断能力需要的极限熄弧角为γmin,并取γmin=7°,一般认为实际熄弧角γ小于γmin时将引起换相失败[19]。
直流电流、直流电压、熄弧角、超前触发角以及交流线电压之间存在的约束关系如式(1)~(5):
(1)
(2)
Id=(UR-UI)/R
(3)
(4)
(5)
式中:UR和UI分别表示整流侧、逆变侧直流电压;Ud0为逆变器的理想空载直流电压;Id为直流电流;R为直流回路电阻;UL为换流母线线电压有效值;Lr为受端交流系统等值换相电感;γ为熄弧角;β为换流阀超前触发角;φ为交流系统不对称故障时换相线电压波形相位偏移角。
由式(4)、(5)可知,对于特定的直流输电系统,熄弧角γ的大小与直流控制量(超前触发角β)以及电气量(直流电流、换相电压等)有关。逆变侧交流故障后,换流母线电压下降,直流电流变大,熄弧角γ变小。而直流系统的控制系统可能在严重的交流故障时调节能力不足或难以保证触发角的调节与故障演化相匹配,从而导致换相失败。
相比于UHVDC系统单次换相失败,连续换相失败持续时间较长,多次冲击交直流电网,可能引起的后果更为严重,且抑制连续换相失败更容易实现[6,18,20]。因此,本文重点研究分层接入的UHVDC系统连续换相失败抑制方法,有效抑制直流系统分层接入方式下逆变侧一个交流系统故障时该交流系统所连的逆变器乃至非故障交流系统所连的逆变器发生连续换相失败。
3 直流控制策略改进
3.1 交流故障时熄弧角变化量分析
对于分层接入UHVDC系统,当逆变侧其中一个交流系统发生对称性故障时,其对应的换流母线线电压UL下降,根据式(4)得,与之相连的逆变器的熄弧角γ会减小;而根据式(1)、式(2),UL下降又会使逆变侧直流电压UI快速下降,进而依据式(3)可知直流电流Id快速增大,根据式(4)得,此时熄弧角γ也会减小。即对于逆变侧发生故障的交流系统,其逆变器熄弧角γ的减小可看作是由直流电压下降、直流电流上升共同引起的,在严重交流故障情况下可能导致γ小于γmin,引发换相失败。
对于分层接入UHVDC系统逆变侧的另一个交流系统,即逆变侧非故障交流系统,据式(4)可知,其逆变器的熄弧角也会减小,且此时非故障交流系统的换流母线电压变化不大,则可认为其熄弧角的减小是由直流电流Id的增大引起的。严重故障下非故障交流系统所连的逆变器也可能发生换相失败。
逆变侧交流系统发生不对称故障时,其分析过程与交流系统对称故障时类似,特殊的是,不对称故障时换流母线电压下降同时过零点偏移,根据式(5)可知,此时熄弧角γ也会减小。
综上可见,在分层接入UHVDC系统中,逆变侧交流系统发生故障时,对于逆变侧故障交流系统和非故障交流系统所连的逆变器,其熄弧角的减小量均与直流电流的上升程度有关。若能充分利用故障后直流电流的动态变化特征来快速调节直流控制系统,补偿因直流电流上升而减小的熄弧角,则可降低直流输电发生换相失败的概率。详见下节。
3.2 改进定熄弧角控制策略
换相失败的本质是熄弧角过小,为有效抑制换相失败,通常直流输电逆变器采用定熄弧角控制,使熄弧角稳定在整定值[7,18]。定熄弧角控制实质上与定β角控制一样,控制熄弧角可等效为控制β角。其基本原理为:将熄弧角整定值γ0(17°)与实测值γ(取上周期最小值)的差值加上由电流偏差控制引起的Δγ,与31°比较(为使β不大于46°而设定的一定值),然后输入至PI调节器中调节逆变器触发角。
根据上述定熄弧角控制的基本原理,结合3.1节的分析,对其做出如下改进:在定熄弧角控制中引入直流变化量,充分利用故障期间和系统恢复过程中直流电流的动态波动特征,来快速调节定熄弧角控制器,补偿因直流电流上升而减小的熄弧角,提高直流输电系统的换相失败防御能力。
以逆变侧±500 kV交流系统发生对称性故障为例进行详细分析。当逆变侧±500 kV交流系统发生对称性故障时,±1 000 kV交流系统换流母线电压变化不大;β为控制量,且故障瞬间直流控制系统尚来不及动作,可认为β不变,则根据式(4)可知,此时±1 000 kV交流系统所连逆变器的熄弧角γ的减小程度是由直流电流Id的增大量决定的。
此时,对于逆变侧±500 kV交流系统所连的逆变器,根据式(4)可知,补偿由直流电流Id增大而引起的熄弧角γ减小量,也可在一定程度上抑制连续换相失败,具体实现方法如下。
为充分利用电流的故障动态特征,且不增加额外投资,参考CIGRE HVDC标准测试模型中逆变侧的电流偏差控制,将直流电流变化量ΔId转化为定熄弧角控制器的输入值来快速调节熄弧角运行值,以补偿因直流电流上升而减小的熄弧角。改进后的定熄弧角控制如图2所示。

图2 改进的定熄弧角控制Fig.2 Improved constant extinction angle control
图2中,IdI为逆变侧直流电流测量值;一阶惯性环节用来模拟直流电流的测量过程,并将电流标幺化;IdN为直流电流额定标幺值,为1 p.u.;直流电流变化量ΔId=IdI-IdN(均为标幺值);k表示转化系数。改进定熄弧角控制策略中,将直流电流变化量ΔId乘以转化系数k并取绝对值输入至定熄弧角控制器。其中,取绝对值的原因如下:故障恢复过程中,直流电流将从故障峰值波动至稳定值,为了有效抑制直流电流剧烈波动导致的连续换相失败,并体现故障恢复期间直流电流的动态特征,则在图2中加入取绝对值环节。
该改进控制策略的具体步骤如图3,简述如下:
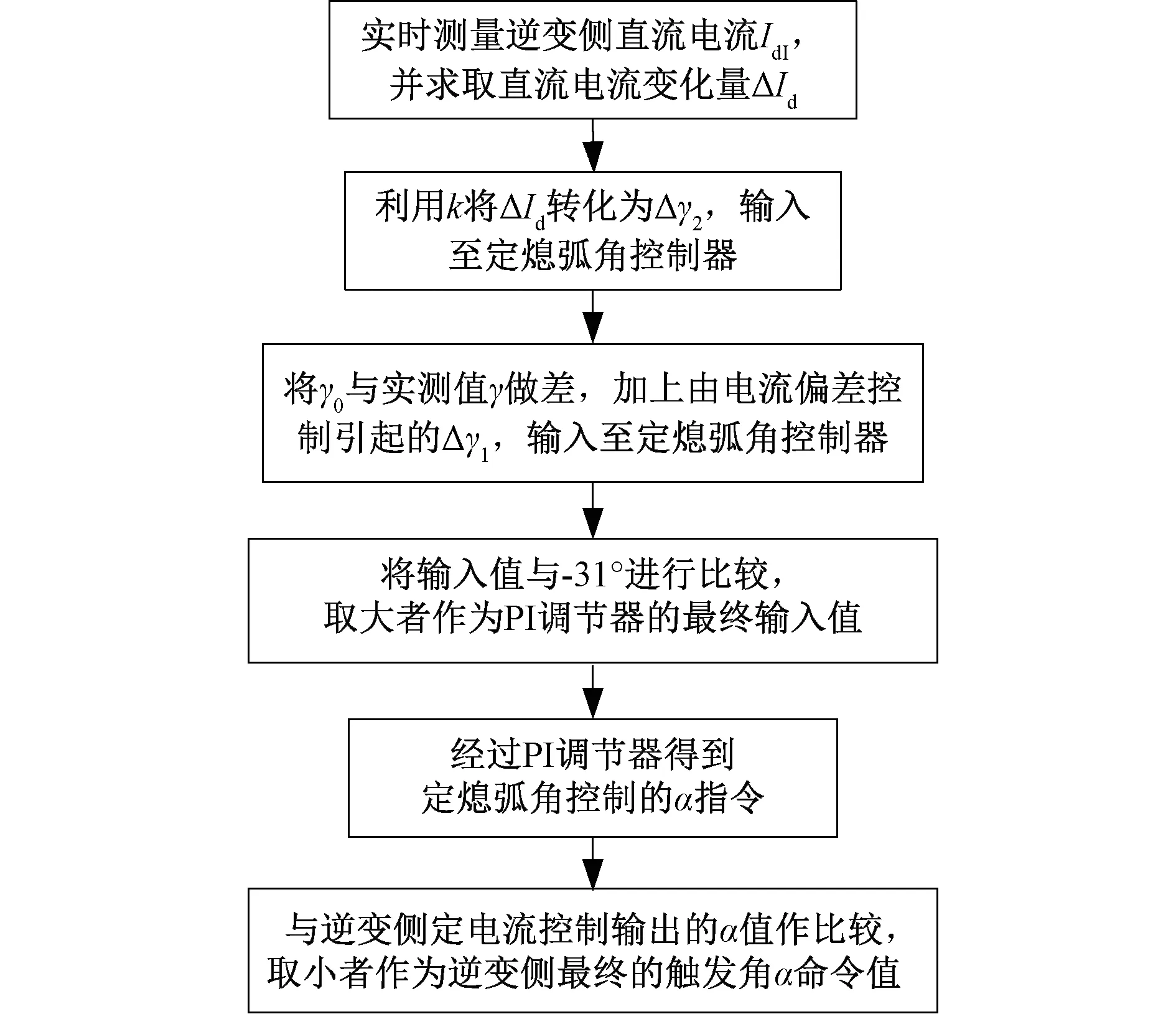
图3 改进控制策略的流程图Fig.3 Improved control strategy
(1)实时测量逆变侧直流电流IdI,并与直流电流额定值做差,求取直流电流变化量ΔId。
一方面,在系统正常功率变化下,由于平波电抗器的作用,直流电流仅有微小的波动,即直流电流变化量ΔId接近于0,此时改进的定熄弧角控制与常规定熄弧角控制基本一致;另一方面,所提改进控制策略中转化系数k在设定时可考虑此方面的影响,其取值能保证所提策略不影响直流系统的正常运行。可见,此改进控制策略并不影响直流系统的正常运行。
系统启动阶段电流波动较大,本文设置所提控制策略在此阶段不起作用,当系统稳定运行之后再将其投入工作。
(2)将直流电流变化量ΔId乘以转化系数k并取绝对值得到Δγ2,作为定熄弧角控制器的输入值。
转化系数k较小时,其感应直流电流变化的能力较弱,进而对故障后直流输电换相失败的抑制作用较弱;k过大时,对直流电流的变化过于敏感,同时为使所提改进控制策略不影响直流系统的正常运行,通过分析和仿真得k一般取1~3。
逆变侧高低端阀组控制的转化系数k一致。逆变侧任意一层交流系统故障时,都会引起直流电流增大,使熄弧角减小而易引发换相失败,为此,本文利用ΔId补偿因直流电流上升而减小的熄弧角以抑制连续换相失败。正常运行时高低端阀组的控制输出量α均稳定在额定值147°左右;逆变侧交流故障时在所提控制策略下高低端阀组的α均减小(但仍保持逆变运行,即α不小于90°),熄弧角γ均增大以有效抑制换相失败(如图4~6所示)。逆变侧交流故障时高低阀组的α虽不完全一样,但均在147°~90°,且两者相差不大,从而不影响高低阀组之间的平衡。
(3)将熄弧角整定值γ0(17°)与实测值γ(取上周期最小值)做差,加上由电流偏差控制引起的Δγ1以及由直流电流变化量ΔId转化而来的Δγ2,与-31°进行比较,取较大的一方作为PI调节器的输入值。
(4)利用PI调节器得到逆变侧定熄弧角控制输出的触发角α指令,将此α值与逆变侧定电流控制输出的α值作比较,取小者作为逆变侧的最终触发角α指令值。
由于将直流电流变化量ΔId转化为定熄弧角控制器的输入值来快速调节熄弧角运行值,补偿因直流电流上升而减小的熄弧角,则改进定熄弧角控制得到的触发角指令值总是小于逆变侧定电流控制输出的α值,即逆变侧一直处于定熄弧角控制。
此外,由上述分析可知,本文所提出的方法不依赖交流故障的快速检测。交流系统保护动作速度较慢乃至保护的拒动等并不会影响本文所提改进控制策略对直流系统连续换相失败的抑制效果。
4 仿真验证
为验证所提策略的有效性,在PSCAD/EMTDC中搭建如图1所示的±1 100 kV分层接入的UHVDC仿真模型。仿真中设置逆变侧高、低压阀组换流母线处发生不同类型、不同过渡电阻、接地电感的交流故障,观察熄弧角、直流电压、直流电流等电气量,对比分析以下两种控制方法对连续换相失败的抑制作用。
控制方法I:CIGRE HVDC标准模型控制策略。
控制方法II:在控制方法I的基础上,改进其定熄弧角控制。
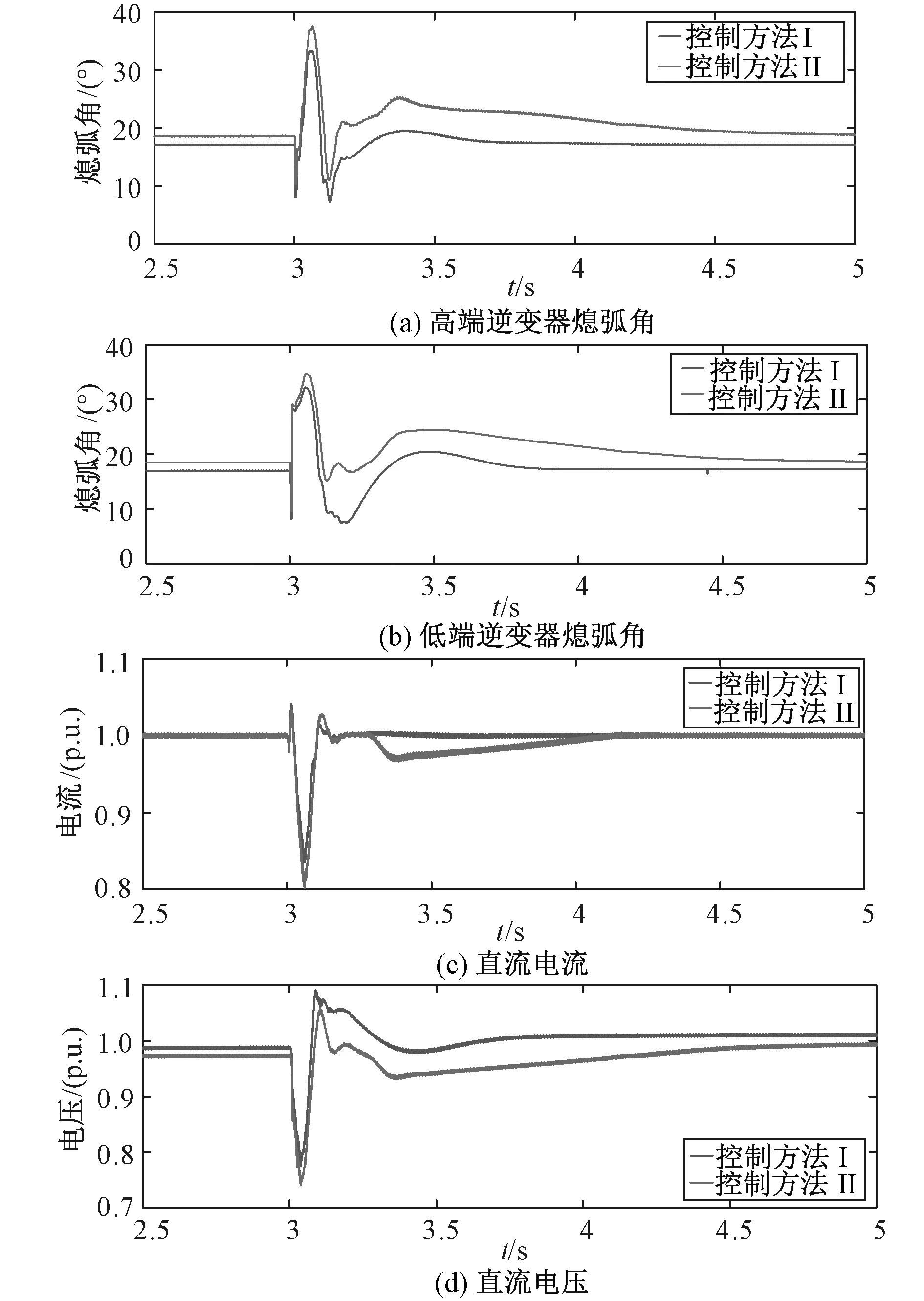
图4 逆变侧1 000 kV交流系统Rg=250 Ω三相接地故障Fig.4 Three-phase fault with Rg=250 Ω on 1 000 kV AC bus at the inverter side
案例1:逆变侧1 000 kV交流母线发生过渡电阻Rg=250 Ω的三相接地故障,故障发生时刻和持续时间分别设为3 s和10 s(用于模拟永久性故障)。图4为在上述两种控制方法下的仿真结果。
由图4可知,在上述两种控制方法下,故障后高、低端逆变器的熄弧角均大于极限熄弧角γmin=7°,直流输电系统均未发生换相失败,且在控制方法II下逆变器熄弧角略大于控制方法I下的熄弧角。此时过渡电阻Rg较大,对应实际中故障点距换流母线较远、故障较轻的情况,如图4所示,故障后直流电压、直流电流变化不大。此外,由图4(c)、4(d)可知,正常运行时(即故障发生之前)在所提改进控制策略下的直流电流、直流电压均与未投入该改进策略时的电流、电压相差较小,其标幺值均基本稳定在1 p.u.附近,验证了所提改进策略并不影响直流系统正常运行时的运行参数。
对于其它较轻微的故障,大量仿真表明,若在控制方法I下HVDC系统不发生换相失败,则采用控制方法II时也不会引发换相失败,即改进的定熄弧角控制策略并不会降低直流输电的换相失败抵御能力。
案例2:逆变侧1 000 kV交流母线发生过渡电阻Rg=50 Ω的三相接地故障,故障发生时刻和持续时间分别设为3 s和10 s,图5给出了在上述两种控制方法下的具体仿真结果。
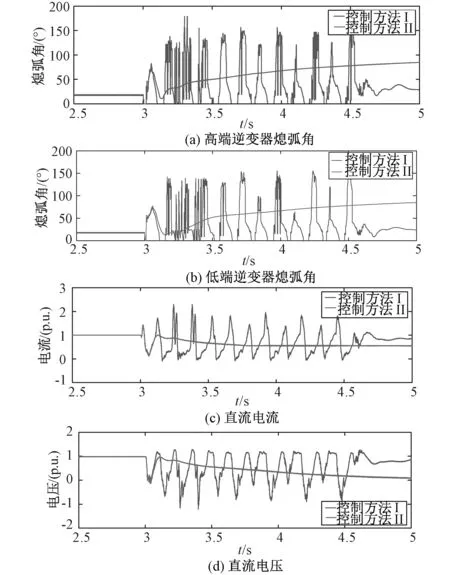
图5 逆变侧1 000 kV交流系统Rg=50 Ω三相接地故障Fig.5 Three-phase fault with Rg=50 Ω on 1 000 kV AC bus at the inverter side

图6 逆变侧500 kV交流系统单相金属性接地故障Fig.6 Single-phase solid grounded fault on 500 kV AC bus at the inverter side
由图5可知,故障发生后,在控制方法I下,高、低端逆变器的熄弧角均多次降为0°,直流系统发生连续多次换相失败,故障后直流电流、直流电压波动剧烈且波动时间较长,对交流系统造成多次冲击。而采用控制方法II时可有效避免直流系统第二次换相失败:高、低端逆变器在故障发生后分别超过24 ms、12 ms时熄弧角大于极限熄弧角γmin,且故障后直流电流、直流电压波动时间短,利于直流系统故障后的迅速恢复。
案例3:逆变侧500 kV交流系统换流母线发生单相金属性接地故障,故障发生时刻和持续时间分别设为3 s和10 s,图6给出了在上述两种控制方法下的具体仿真结果。
由图6可知,类似于案例2,控制方法II可有效抑制HVDC输电连续换相失败。故障后在控制方法I下,高、低端逆变器的熄弧角均多次降为0°,故障后直流电流、直流电压波动剧烈。而控制方法II明显减少换相失败的次数:高端逆变器在故障发生后超过455 ms时熄弧角均大于极限熄弧角γmin,不再发生换相失败;低端逆变器仅发生两次换相失败,在故障发生后超过137 ms时熄弧角均大于γmin;由图6(c)、(d)知,在所提控制策略下,故障后直流电流、电压波动时间较短,约400 ms时趋于稳定。
案例4:逆变侧1 000 kV交流系统换流母线发生接地电感Lf=0.1 H的三相故障,故障发生时刻为3 s,图7给出了具体仿真结果。
由图7可知,类似于案例2和3,控制方法II可有效抑制HVDC输电连续换相失败:控制方法I下,高、低端逆变器的熄弧角均多次降为0°,系统多次发生换相失败;而在控制方法II下高、低端逆变器均发生3次换相失败。

图7 逆变侧1 000 kV交流系统Lf=0.1 H三相接地故障Fig.7 Three-phase fault with Lf=0.1 H on 1 000 kV AC bus at the inverter side
为进一步验证所提控制策略能有效抑制直流输电连续换相失败,在逆变侧500 kV、1 000 kV交流母线处设置不同故障进行仿真分析,包括单相接地故障和三相短路故障。由案例1可知,当过渡电阻为250 Ω 时,在上述两种控制方法下直流系统均不会发生换相失败。下面仿真中设置过渡电阻在0~250 Ω范围内,故障发生时刻和故障持续时间仍分别为3 s和10 s,统计两种控制方法下直流系统高、低端逆变器换相失败次数,如表2、表3所示(“-”表示对应换流器阀组一直发生连续换相失败)。
表2 逆变侧1 000 kV交流母线各种交流故障下换相失败次数
Tab.2 Number of commutation failure under various faults on 1 000 kV AC bus at the inverter side

故障类型过渡电阻/Ω控制方法I控制方法II高压阀组低压阀组高压阀组低压阀组三相故障013-2-20879122501618111002322150333220012002500000单相故障026323620545834509295331007983441507477322007174012500000
由表2、表3可知:对于较轻微的故障(如过渡电阻较大的故障),若采用控制方法I时HVDC系统不发生换相失败,则采用方法II时亦不会引发换相失败;同一交流故障条件下,采用控制方法II时HVDC系统发生换相失败的次数总是小于或等于采用控制方法I时换相失败的次数,可见所提控制策略能有效抑制各种交流故障下的连续换相失败。
表3 逆变侧500 kV交流母线各种交流故障下换相失败次数
Tab.3 Number of commutation failure under various faults on 500 kV AC bus at the inverter side

故障类型过渡电阻/Ω控制方法I控制方法II高压阀组低压阀组高压阀组低压阀组三相故障0-7-1204944525021111002100150000020000002500000单相故障0431811320827842507667321001000150000020000002500000
5 结 论
本文提出一种基于直流电流变化量的定熄弧角改进控制策略,充分利用故障期间和系统恢复过程中直流电流的动态波动特征,使得定熄弧角控制器能够根据直流电流变化量迅速做出反应,增大熄弧角,以抑制换相失败。理论和仿真分析表明:
(1)此方法不依赖于交流故障的快速检测,易于实现且无需增加其他附加投入。
(2)能有效抑制UHVDC输电连续换相失败,改善故障恢复特性。
(3)明显减小了逆变侧交流故障时直流电流、电压的波动程度和波动时长,减小晶闸管、平波电抗器等设备所受的电流应力,延长器件使用寿命。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
电工技术学报(2022年19期)2022-10-14
舰船科学技术(2022年11期)2022-07-15
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
宁夏电力(2022年1期)2022-04-29
现代电子技术(2022年1期)2022-01-25
电子制作(2019年11期)2019-07-04
消费导刊(2018年10期)2018-08-20
电子制作(2018年8期)2018-06-26
