
高速无刷直流电机分立电源控制系统的设计
2020-04-09 12:30杨鹏
原子能科学技术 2020年4期
杨 鹏
(1.核工业理化工程研究院,天津 300180;2.国防科技工业核材料技术创新中心,天津 300180)
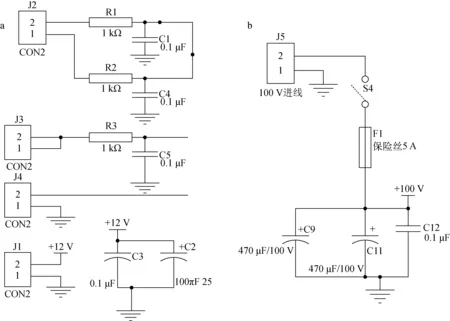
图1 控制电源(a)和驱动电源(b)的设计图Fig.1 Design schematic illustration of control power (a) and drive power (b)
高速无刷直流电机具有体积小、效率高、能量密度大等诸多优点,因此已被选为高速旋转机械的驱动电源备选方案之一。由于技术敏感性,美国、Uranco、俄罗斯均对该项技术禁止出口。由于一般的高速旋转机械空间很小,因此在目前的高速无刷直流电机控制系统中,电机驱动电源与控制电源使用同一供电装置,以达到在实现功能的同时减少控制系统的体积,使之小型化,以便达到适用于高速旋转机械的目的。但在实验中发现,采用同一供电方式易出现电源信号的串扰,进而导致高速旋转机械失效[1]。
如何将两种电源合理分立,保证控制系统完成控制高速无刷直流电机的任务,且不影响其他电路的结构是一个难题。其难点在于放置电路板的空间很小,将两种电源分立会增大占用空间,甚至超出可使用面积[2-3]。因此,既要对两种电源进行分立,又要在有限空间内设计出新的电路板结构,保证电机正常运行。
考虑到高速旋转机械稳定运行的特殊要求,本文拟进行电机驱动电源与控制电源的分立设计,以便将电机驱动电源与控制电源有效分离,并对电源控制系统的信号处理系统、信号分配系统和电源保护系统等进行重新设计,使其体积更小、功率更低、电源无串扰且稳定可靠。重新设计的电源控制系统要达到以下要求:1) 在不扰乱所有信号正常运行的情况下,改变原有的信号处理方式;2) 使获得的霍尔信号按顺序译码成为IGBT门极的导通信号;3) 保证电机驱动电源与控制电源分离后,电路中各信号不出现串扰,能单独、稳定地分别控制电机和控制系统,并保证在非手调的状态下,维持电压和电流在合理的范围内,即合理地设置电压和电流的保护电路[4]。
1 电机驱动电源与控制电源的分立设计
控制电源和电机驱动电源的设计图示于图1。
通过上述设计可使电机控制电源直接提供12 V电源,而电机驱动电源直接提供0~100 V电源,这样既可避免电机控制电源使用高电压导致其过压烧毁,也可使电机控制电源部分的布线更加精细[5-7]。对于电机驱动电源,设计分立电源后可使电机驱动电压大幅提升,突破原来的12 V的限制,其电压驱动范围可达到0~100 V。
由于放置电路板的空间很小,将原有电源分立成电机驱动电源和控制电源后,占据空间会超出原有设计空间,导致分立电源后的电路板无法放置在原有空间,因此需对电路板的其他部分进行相应的设计改进。
2 信号处理系统的改进
电机驱动电源与控制电源分立设计前,原信号处理系统由于电源采用公用设计,电源和信号捕获系统融为一体。这样设计的优点是节省空间,但如果出现问题不能根据模块化原则迅速找到故障点的位置[8]。采用分立电源设计后,可将信号捕获系统和信号处理系统也相应单独设计。由于信号捕获系统受分立电源的影响较小,而且也满足使用要求,可不进行改进,沿用上一版本的设计;而信号处理系统要从捕获系统中独立出来,需重新设计[9-11]。
根据模块化设计原则,需将信号处理系统计成一个部分。本文设计的信号处理系统示于图2。
改进后的信号处理系统可使从上三桥获取的3路信号进入J7中分别处理,而其他3路直接从下三桥引出。
3 信号分配系统的改进
信号处理系统改进后会影响到信号分配系统[12-13],因此,原有信号分配系统也需重新设计。本文所设计的信号分配系统示于图3。
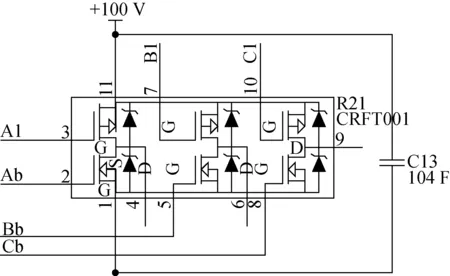
图3 信号分配系统改进设计图Fig.3 Design schematic illustration of improved signal distribution system
由图3可见,从信号处理系统引出的6路控制信号(上三桥和下三桥)都合理地引入到IGBT中,在不同时段以特定的顺序合理触发IGBT的门极,使控制信号得到正确分配,无刷直流电机三相绕组顺序导通,驱动电机逆时针运转[14]。
4 电源保护系统的改进
在分立电源后,电源保护系统需重新设计以满足新的控制系统的要求,其中电容和电阻的组合用来引导超过额定值的电流离开高速无刷直流电机控制系统,实现给电机断电的功能[15]。电源保护系统的改进设计图示于图4。
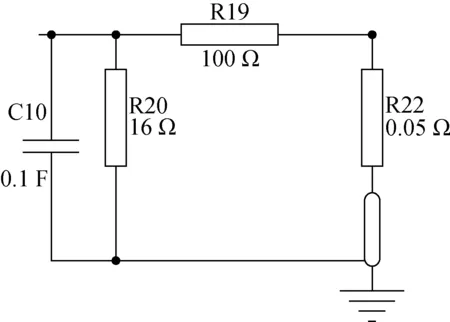
图4 保护部分改进设计图Fig.4 Design schematic illustration of improved power protecting system
5 改进设计前后控制电流与驱动电流的对比
对改进设计前后的高速无刷直流电机系统进行对比实验,分别选取输入电压1、2、4、8、12、15、50、60、70、80、90、100 V,对比改进设计前后的控制电流和驱动电流,结果列于表1、2。
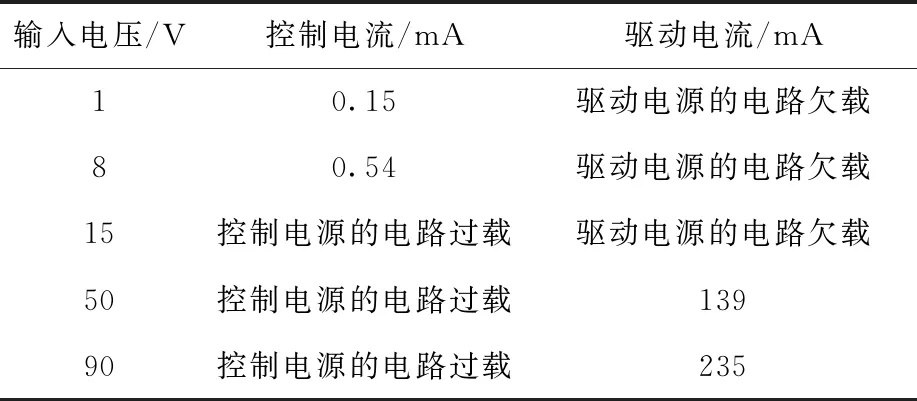
表1 改进设计前的控制电流与驱动电流Table 1 Control current and drive current before improvement design
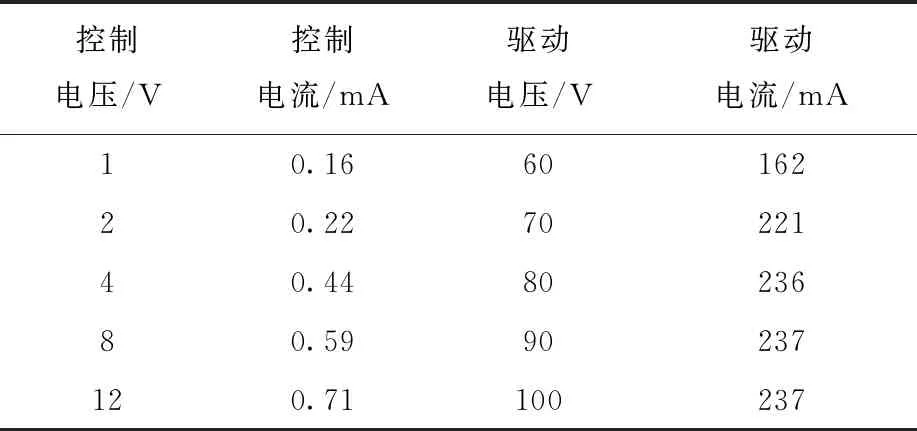
表2 改进设计后的控制电流与驱动电流Table 2 Control current and drive current after improvement design
由表1可见,改进设计前,驱动电源和控制电源均使用0~100 V的输入电压进行供电,当输入电压超出12 V后,会出现控制电源的电路过载,导致高速无刷直流电机停机;而输入电压不足8 V时,会出现驱动电源的电路欠载,导致高速无刷直流电机不能启动。
由表2可见,改进设计后,电机控制电源的电压范围为0~12 V,驱动电源的电压范围为0~100 V。它们单独控制各自的电路,不会出现控制电源的电路过载及驱动电源的电路欠载的情况,电机正常运转。
6 结论
1) 通过对高速无刷直流电机驱动电源和控制电源的分立,解决了信号串扰问题。
2) 通过模块化设计,独立设计了信号处理系统,实现了高速无刷直流电机控制系统6路控制信号的正确处理。
3) 本文设计的高速无刷直流电机分立电源控制系统,实现了控制电源的精细化控制及驱动电源的宽幅输出,解决了所驱动高速旋转机械的失效问题。
猜你喜欢
大电机技术(2022年5期)2022-11-17
——信号处理
无线电工程(2022年10期)2022-10-24
汽车实用技术(2022年12期)2022-07-05
潍坊学院学报(2021年2期)2021-07-22
阅读(快乐英语高年级)(2019年2期)2019-09-10
电子制作(2019年14期)2019-08-20
制导与引信(2017年3期)2017-11-02
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
消费者报道(2016年3期)2016-02-28
