基于群体智能的分布式交通信号控制系统设计
2020-04-09 06:32丁迁成
建筑施工 2020年12期
尹 露 丁迁成
上海电科智能系统股份有限公司 上海 200063
在城市交通控制系统中,控制的对象是交通流,控制设备主要是交通信号灯。国内外常见的交通信号控制系统多为集中式控制,即中心系统将区域内的所有信号机连接起来,由同一台计算机对整个系统进行集中控制。
集中式控制的缺点为当路口规模扩大时,集中式的控制系统无法实现大量交通数据的通信传输和控制策略的实时优化,且系统维护难度大[1]。分布式信号控制系统没有中央计算单元,控制操作依赖于局部交叉口控制器,大大简化了模型结构,为信号控制方案的实时性与可靠性的兼顾优化提供了理论支撑[2]。国外已有的一些采用分布式架构设计的信号控制系统,如PRODYN系统、OPAC系统和RHODES系统[3],有效地均衡了集中式交通控制模型的通信需求和计算荷载,但这类系统采用交通模型预测路口环境演化,与路口的真实环境相差较大,且不具备自学习能力,在高饱和度等复杂交通条件下控制效果差。
近两年,随着芯片级计算能力变强及移动互联网的发展,边缘计算这一概念实现的阻碍越来越小,在路口实时采集数据,在线分析处理,并得出结果,使得分布式信号控制模式的实施成为可能。人工智能的发展也使得分布式信号控制模式的控制规则实时产生成为可能[4]。本文将群体智能的概念引入到分布式信号控制系统的设计中,提出了一种新的系统架构设计思路。
1 信号控制模式
集中式信号控制模式用一句话概括就是:一个中央控制器带多个路口信号控制器,路口信号控制器没有数据处理能力,仅仅负责交通数据的录入和交通信号的输出,而运算全部在中央控制器上进行。分布式信号控制模式是相对于集中式系统而言的,其由许多台路口控制器组成,每个路口控制器都有自己的数据库、采集器、运算器,即每个路口都有决策能力,在物理上是分散的,但在逻辑上,所有相互连接的路口控制器构成了分布式系统。
因此,即使路口控制器多,分布式控制模式也不必担心长距离数据通信的问题,此外,方案生成式响应控制也成为可能。其优点包括:高度可靠性和鲁棒性,效率高,扩展性强,成本低。2种控制模式的结构对比如图1所示,差异对比如表1所示。
2 群体智能
群体智能(swarm intelligence)是指在集体层面表现的分散的、去中心化的自组织行为。一个群体智能系统由多个功能简单的智能个体(智能体)构成,系统中每个智能体与其他智能体及外部环境进行信息交互,所有智能体都遵循非常简单的规则。尽管没有中央控制结构,但本地智能体间的直接或间接的通信可以催生复杂的全局系统性行为。
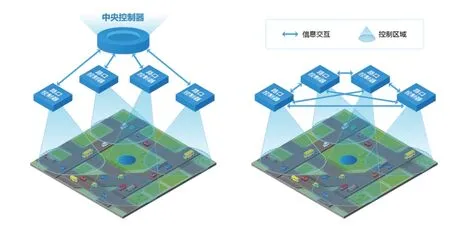
图1 2种控制模式的结构对比
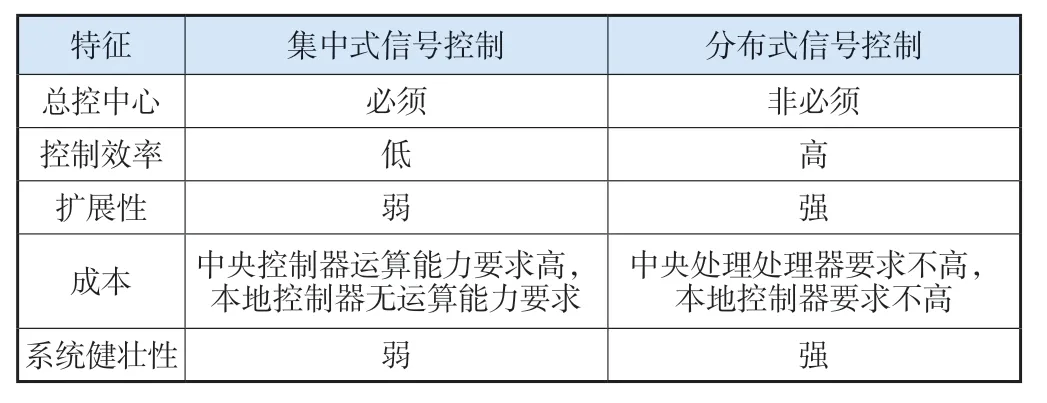
表1 2种控制模式的差异对比
本质上,交通系统是一个分布式系统,而分布式交通信号控制系统的自适应控制的内在需求与智能体技术自治、协作的特性相符。智能体,即路口信号控制器可以通过传感器感知外部环境的信息,并根据控制目标和环境变化,自发作出响应,实现对交通系统的自动控制;同时,分布式交通信号控制系统中的各路口智能体能够按照合适的协调机制相互协作,形成多智能体控制系统(multi-agent system,MAS),通过协作达到整个路网全局最优的目的。群体特征与信控系统特征的相似之处如表2所示。

表2 群体特征与信控系统特征的相似之处
3 分布式交通信号控制系统设计
3.1 设计思路
未来智能交通系统的发展,应该将交通各子系统,如诱导、信控、监测等集成起来,要求多智能体交通系统在互用性、不确定性、可拓展性等方面具有更好的性能,多智能体的自学习能力也是实现交通自治的关键,这样的架构是复杂时变条件下交通网络管理的可行方案。现提出一种新的系统架构设计思路:
1)每个路口的信号机作为一个智能体。
2)各路口之间按照区域信息共享协调机制。
3)路口之间数据交互,系统存在一定的进化规则。
该系统架构设计如图2所示。
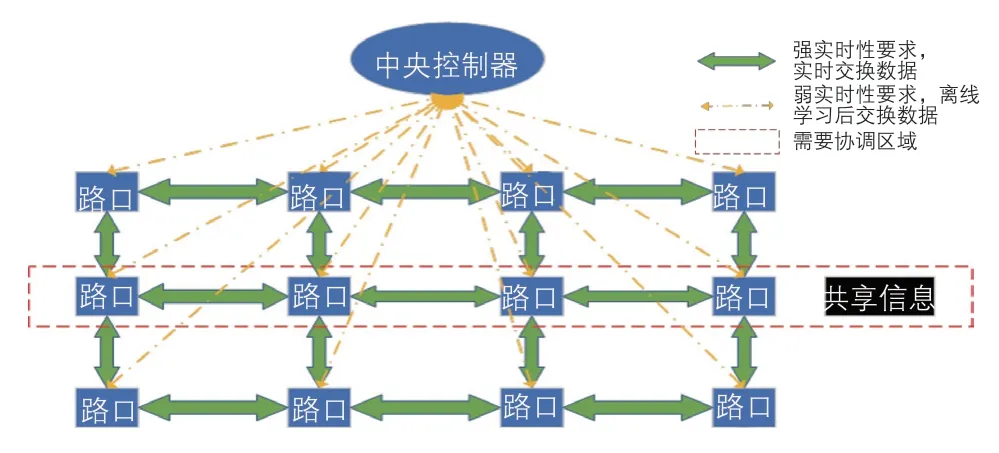
图2 分布式交通信号控制系统设计
3.2 智能体信号机
基于多智能体技术,每个路口的信号机作为一个智能体——为了减少智能体间的不必要通信,避免维数灾难——只与相邻的智能体直接通信。路口智能体(信号机)由感知系统、决策系统、通信系统三部分组成。
3.2.1 感知系统
感知系统是对系统所在环境进行了解和探测的系统,即由智能体所控制的一组车辆检测器。它们可将所控制路口的车辆信息传输给智能体,使智能体及时了解环境状况。信号机通过线圈、视频探头、雷达等检测器读取数据,并实时进行分析,将路口交通流状态转换为排队长度、车流量等具体数据,交由决策系统进行运算。
3.2.2 决策系统
决策系统分为判断模块、计算模块、学习模块和存储模块。
1)判断模块。根据感知系统输出的分析数据,判断交通流所处状态,当交通流饱和度较低时,以最大通行量及最小延误时间为目标进行决策;当交通流饱和度较高时,以降低拥堵,保证路网安全性为目标进行决策。同时,对之前一段时间的信号控制效果进行评价,若效果不达标需要启动学习模块,对计算模块中的相关参数进行更新。
2)计算模块。根据本地感知系统输入的数据及相邻路口感知系统输入的数据,构建以排队长度和输入车流量和输出车流量为依据的简单控制规则,结合当前相位的排队长度及流入车流数据、下个相位待放行车辆数以及判断模块输出的结果,决定信号灯切换与否。
4)存储模块。采用队列的结构,存储定长时间内的交通流数据,用于规则失效后新规则参数的学习。
3.2.3 通信系统
通信系统主要是用于实现与相邻智能体的信息交互,如4G通信、5G通信、有线通信等。
3.3 协调机制
首先由中央控制器或人工确定需要协调的路口范围,需要协调的路口(例如主干道需要绿波)共享路口车辆信息,智能体根据本地路口的车辆信息和当前协调区域内智能体共享的数据计算得到控制方案,并共享给其他路口,每个智能体根据最新共享信息制定新的方案,通过迭代,受协调的路口以该方案作为控制方案。
协调机制以需协调的多个路口的决策方案为基础,在此基础上找寻需协调路口的中间方案,以实现绿波。
3.4 数据交互
路口间数据的实时性交互包括强实时性和弱实时性两部分。其中,强实时性交互数据,如相邻路口的各车道排队长度、各进口道车流量数据等,交由各路口信号机,按特定规则决定信号方案,以保证信号方案能动态变更。弱实时性交互数据,如计算时段划分、相位修改等,由路口发送给中央控制器集中处理。此外,中央控制器将对车流数据进行离线学习计算,得出最优协调区域、协调参数更新方式和优化规则,最终将各参数同步至各个路口(图3)。
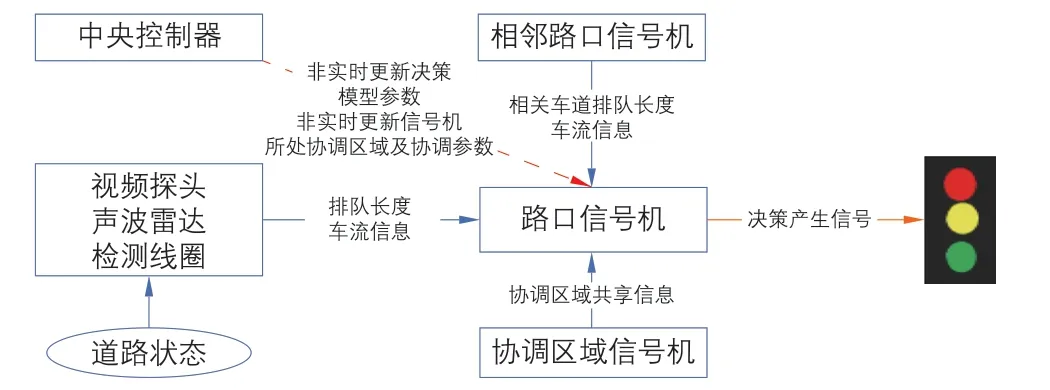
图3 系统数据交互设计
4 基于VISSIM仿真的信号控制系统测试
信号控制系统从研发到投入生产,其功能及可靠性直接关系到它在道路交通信号控制中所发挥作用的大小,从而对城市道路交通管理的科学性、有效性产生最直接的影响。因此,对这些功能及可靠性进行测试的方法尤为重要。可以采用仿真验证系统算法或路口现场测试实际效果。
摁在小岗村包产到户“生死契约”上的10多个红手印,深圳蛇口开山填海的隆隆炮声,早已为改革开放注入了敢闯敢试的血性。只有坚持“大胆试、大胆闯、自主改”,方能突破陈旧的禁区,跨越问题的雷区,走出“小富即安”的舒适区,开辟全面深化改革的新境界。
4.1 仿真算法测试
基于VISSIM软件的具体仿真步骤如下:
1)选择合适的交通仿真软件,建立路网。
2)调查实际路口环境特征,如结构、尺寸、车道数、车辆组成、交通流流向和交通量、信号灯相位数和相序。
3)编写集中式的算法架构的软件,通过仿真软件的COM接口,修改路口的交通信号灯状态,主要表现为一个控制器(中央处理器)控制所有路口的交通信号灯的状态。
4)通过仿真软件中的虚拟检测器检测获得虚拟交通量信息(车流量等数据),通过COM接口交通量信息反馈至控制软件。
5)运行仿真,基于COM接口读取仿真软件中的评价结果,选择评价指标,包括排队长度、行程时间、车辆延误、路网性能等;通过评价结果,确定系统的有效性。
分布式的算法模块主要表现为由一个控制器(智能体)控制一个路口,多个控制器之间相互通信,读取所需要的交通量信息,每一个信号器关联一个路口的信号灯,每个路口独立刷新信号灯状态,仿真测试结构如图4所示。
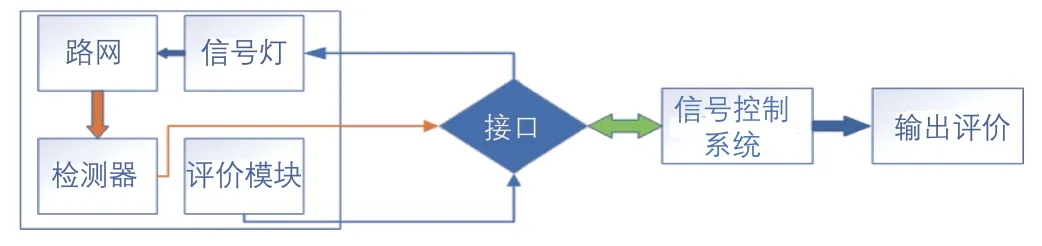
图4 仿真测试结构
4.2 路口现场测试
控制算法经过仿真软件进行初步验证后,必须到路口进行实际测试验证。路口现场测试一般分3个步骤:
1)交通调查获取交通状况信息。
2)方案配置。根据交通状况,配置算法运行需要的参数,设计满足路口交通要求的控制方案。
3)路口验证。控制效果路口验证一般按照算法要求,安排不同数量的车辆在不同时段通过测试路口,以获得通行时间、停车测试以及车辆通行数量等数据,并分析测试所得数据,对算法控制效果进行评价和优化。
5 结语
人工智能的发展使得分布式信号控制模式的控制规则实时产生成为可能,群体智能技术的自治性、协作性和交互性完美地符合分布式交通信号自适应控制的内在需求。该系统可为复杂、不确定环境下交通网络的集成优化控制,提供一条捷径。随着5G通信时代的到来,我们对新的交通信号控制系统模式拭目以待。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
铁道通信信号(2020年8期)2020-01-05
铁道通信信号(2019年1期)2019-01-16
能源(2018年8期)2018-09-21
铁道通信信号(2018年6期)2018-08-29
汽车零部件(2017年4期)2017-07-12
发明与创新(2016年34期)2016-08-22
中国工程咨询(2016年1期)2016-02-14
中国交通信息化(2015年5期)2015-06-05